 基于SWM190RBT6-50芯片的FOC风机方案
基于SWM190RBT6-50芯片的FOC风机方案
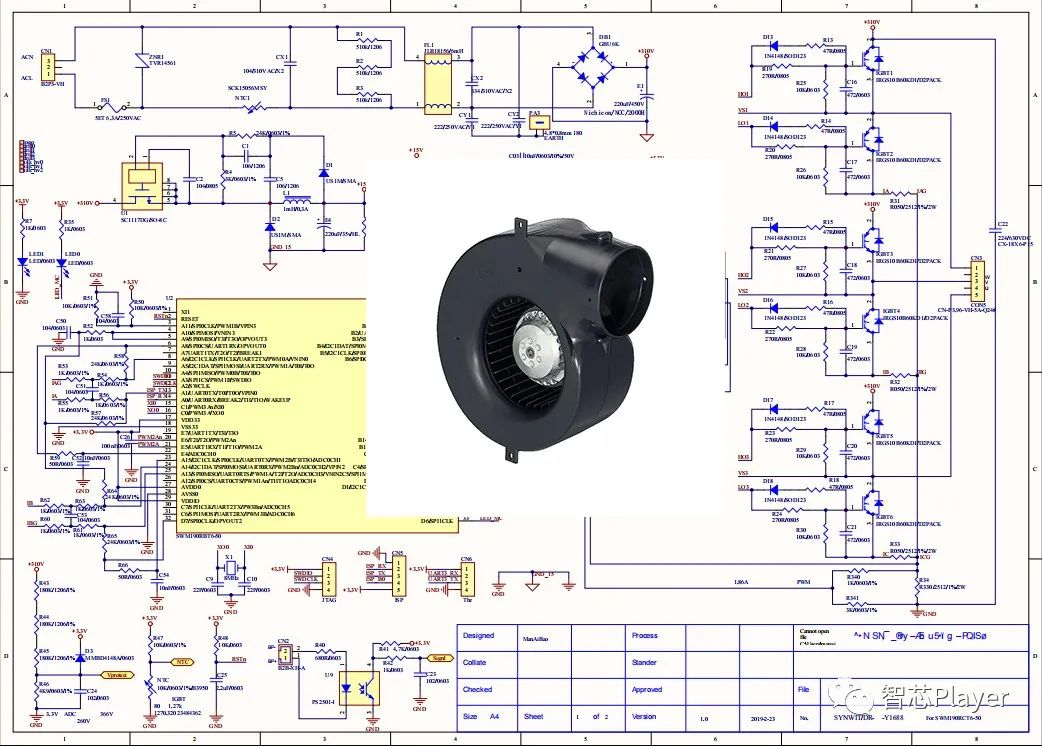
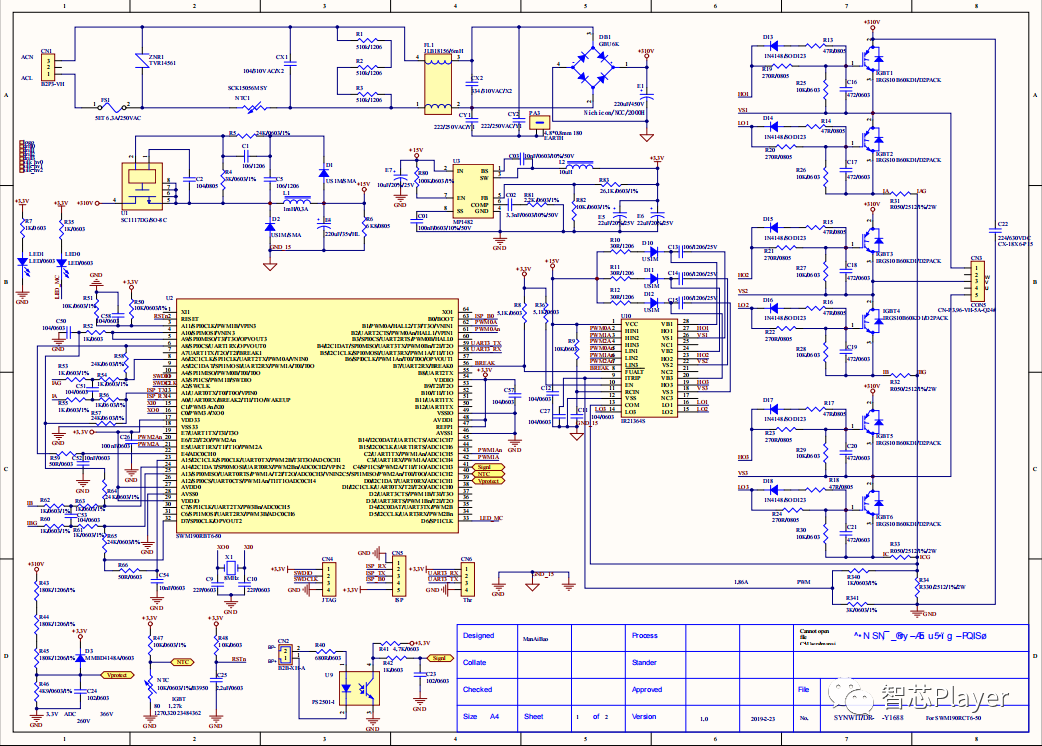
硬件方案--主板及驱动电路
| 类型 | 型号 | 封装 | 数量 |
| 电阻 | 10R | 0603*4 | 1 |
| 100R | 0805 | 1 | |
| 1K | 0603*4 | 7 | |
| 1K | 0805 | 3 | |
| 5.1K | 0805 | 13 | |
| 1M | 0805 | 1 | |
| 电容 | 12P | 0805 | 2 |
| 22P | 0805 | 2 | |
| 4.7UF | 1206 | 2 | |
| 16V1000UF | 电解 | 1 | |
| LED | LED绿色 | 0805 | 25 |
| LED红色 | 0805 | 1 | |
| LED黄色 | 0805 | 1 | |
| 二极管 | 1N4148 | 玻璃管 | 2 |
| 1N5822 | 贴片 | 1 | |
| 晶振 | 32.768K | 2*6 | 1 |
| 8.000MHz | 49SMD | 1 | |
| 芯片 | 1117-3.3 | SOT223 | 1 |
| IR21364S | SOP-28 | 1 | |
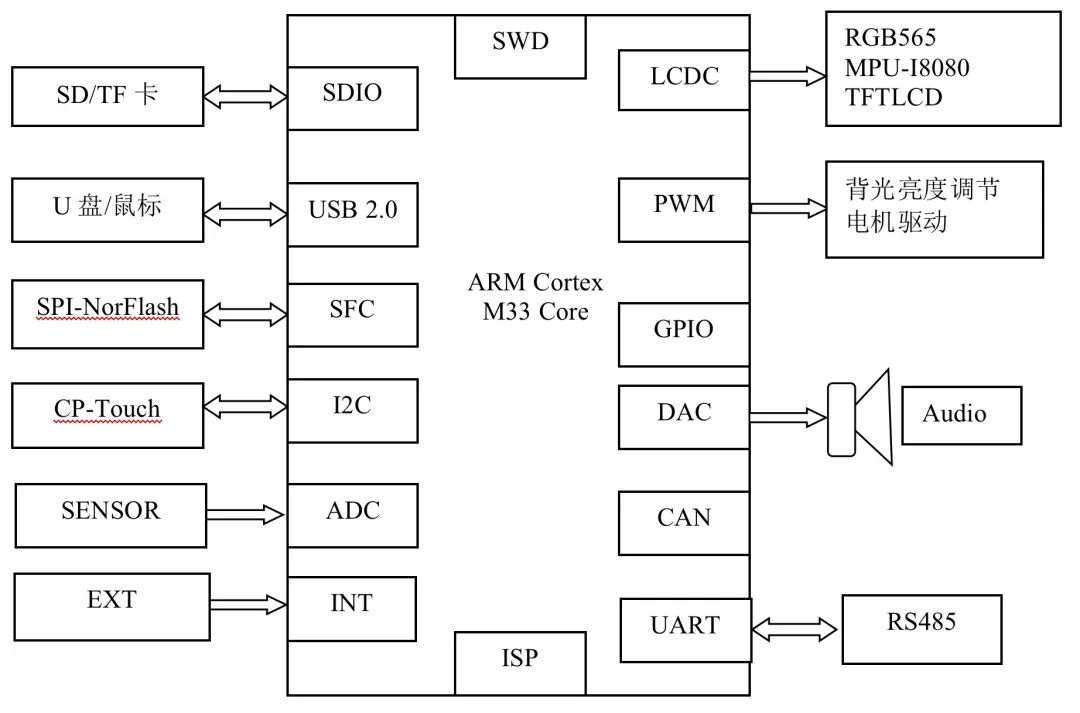
| SWM190RBT6-50 | LQFP64 | 1 | |
| 其它 | 5.1K电位器 | 3362P | 2 |
控制器采用的是一颗国产M0芯片-SWM190RBT6-50,封装是LQFP64。电路包含AC转DC电路,直流电机是高压310V,然后通过SC1117DG转成低压15V,再由MP1482变成3.3V。电机的栅极驱动芯片是IR21364S来控制WVU三路之间的通断,上下臂是通过IGBT,RGS10B60KD1/D2PACK来开关。除此之外还包含一些光耦,LED的常用的电子元器件。
本方案缺失PCB源文件,但是不影响配套程序的相关阅读及学习,本方案的主要用于学习观测器,锁相环,PID算法,SVPWM无感FOC算法以及五段式与七段式调制。
软件方案

软件方案包含了工程文件,无需自己再搭建工程。用的IDE是MDK,小编给大家编译了一下,没有错误可以直接运行。包含龙伯格电机观测器,无感FOC算法,PID调节代码,整套报错信息,顺逆风启动算法,虽然是基于国产M0的代码,但是代码本身耦合性做的很好,完全可以移植到别的MCU平台上面去,同时也是非常适合对电机算法感兴趣的小伙伴认真阅读一番。以下贴一段龙伯格观测器的代码出来:
/******************************************************************************* * Function Name : Speed_PI * Description : It implements the PLL PI regulator. * Input : (B-emf alpha)*sin(theta),(B-emf beta)*cos(theta). * Output : None. * Return : Motor speed (dpp, digit-per-pwm). *******************************************************************************/ s16 Speed_PI(s16 hAlfa_Sin, s16 hBeta_Cos) { s32 wSpeed_PI_error, wOutput; s32 wSpeed_PI_proportional_term, wSpeed_PI_integral_term; wSpeed_PI_error = hBeta_Cos - hAlfa_Sin; #if 1 //???? if(wSpeed_PI_error > 50) wSpeed_PI_error = 50; else if(wSpeed_PI_error < -50) wSpeed_PI_error = -50; #endif wSpeed_PI_proportional_term = hSpeed_P_Gain * wSpeed_PI_error; // !!!p wSpeed_PI_integral_term = hSpeed_I_Gain * wSpeed_PI_error; // !!!i if ( (wSpeed_PI_integral_sum >= 0) && (wSpeed_PI_integral_term >= 0) && (Max_Speed_Out == FALSE) ) { if ((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) < 0) { wSpeed_PI_integral_sum = S32_MAX; } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } } else if ( (wSpeed_PI_integral_sum <= 0) && (wSpeed_PI_integral_term <= 0) && (Min_Speed_Out == FALSE) ) { if((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) > 0) { wSpeed_PI_integral_sum = -S32_MAX; } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } wOutput = (wSpeed_PI_proportional_term >> 14) + (wSpeed_PI_integral_sum >> 18); if (wOutput > wMotorMaxSpeed_dpp) { Max_Speed_Out = TRUE; wOutput = wMotorMaxSpeed_dpp; } else if (wOutput < (-wMotorMaxSpeed_dpp)) { Min_Speed_Out = TRUE; wOutput = -wMotorMaxSpeed_dpp; } else { Max_Speed_Out = FALSE; Min_Speed_Out = FALSE; } return ((s16)wOutput); }
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
二极管
+关注
关注
147文章
9700浏览量
167420 -
驱动电路
+关注
关注
153文章
1533浏览量
108710 -
FOC
+关注
关注
20文章
325浏览量
42959
发布评论请先 登录
相关推荐
基于XE160的无霍尔FOC风机控制方案201208MC_FANE
项目名称:基于XE160的无霍尔FOC风机控制方案项目合作模式:1、免费提供软件、硬件方案级技术支持,芯片从软硬件支持方采购;2、直接购买:
发表于 12-03 14:20
低成本FOC风机控制方案201208MC_FANB
项目名称:低成本FOC风机控制方案 项目介绍:该方案适合应用于DC286V供电环境, 用于风机的控制。 主控MCU采用英飞凌的SAF-XC8
发表于 12-10 10:05
英飞凌基于XMC1300的无感FOC风机参考方案
2013年11月1日——英飞凌科技股份公司(FSE: IFX / OTCQX: IFNNY)今天宣布推出基于XMC1300的无感磁场定向控制(FOC)风机参考方案,以及相配套的30W高压应用套件
发表于 12-11 10:54
收藏备用:FOC电机控制设计方案汇总下载
:自动调优无传感器 FOC 解决方案针对绕组电阻变化进行电机温度估算,以保护电机在临时过载情况下免受损坏相关文件下载:2、基于英飞凌XMC1300的无感FOC风机参考
发表于 10-22 16:29
BLDC风机市场逐年攀升,盘点几款解决方案
,比如追觅、素士、直白、徕芬、康夫等等。基于逐渐增长的风机市场,今天就为大家盘点几款风机解决方案。01.EBM 解决方案配有应用 EC 技术的 S3G400
发表于 05-27 14:03
什么是FOC?带你看看无传感器FOC的BLDC电机驱动芯片及解决方案
化的技术路径在芯片架构层面实现复杂的电机驱动控制算法,形成自主知识产权的电机驱动控制处理器内核ME。在该技术下,峰岹科技设计的芯片可实现电机控制 FOC 算法,6~7us 即可完成一次
发表于 06-10 11:40
SWM190系列MCU数据手册
和最大 20K 字节的 SRAM。此外,芯片支持 ISP(在系统编程)操作及 IAP(在应用编程),用户可自定义 BOOT 程序。SWM190 外设串行总线包括多个 UART 接口、SPI 通信接口(支持
发表于 09-14 07:16
英飞凌推出基于XMC1300的无感FOC风机参考方案
2013年11月1日——英飞凌科技股份公司(FSE: IFX / OTCQX: IFNNY)今天宣布推出基于XMC1300的无感磁场定向控制(FOC)风机参考方案,以及相配套的30W高压应用套件
发表于 11-01 10:25
•2832次阅读
华芯微特SWM341系列微控制器主要性能 SWM34SRT6-50显示驱动应用
本文介绍了华芯微特SWM341系列主要性能,和其系列之一的SWM34SRET6-50驱动4.3寸800*480 TFTLCD显示的例程应用。
风机无传感器控制方案用户手册
通过该手册可以了解到的信息有:风机无感 FOC 控制的硬件情况、控制系统的软件框架、软件 功能、软件结构、以及控制方案中的数据处理方式,同时还能够了解到如何进行相关参数的测 试与计算以及使用风
发表于 09-30 16:36
•0次下载






 工商网监
工商网监
评论