 机器视觉里的光学知识科普
机器视觉里的光学知识科普

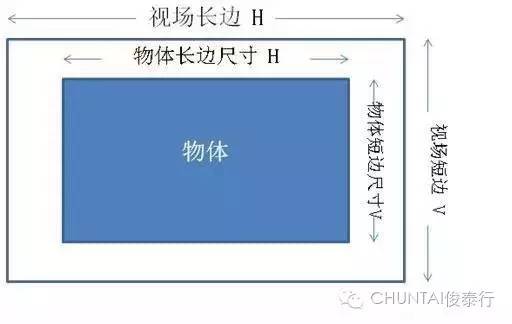
视场
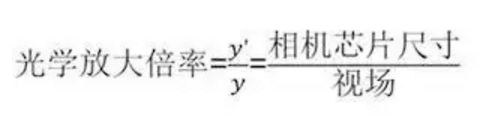
视场(FOV)也称视野,是指能被视觉系统观察到的物方可视范围。对于镜头而言,可观察到的视场跟镜头放大倍率及相机芯片选择有关。因此通常建议客户根据被观察物体的尺寸,先确定所需的视场,再确定相机芯片尺寸及镜头放大倍率。在实际工程项目中,考虑到机械误差等问题,视场通常要大于待观测物体的实际尺寸,以确保在机械误差的范围内,物体始终位于视觉系统的可视范围内。

分辨率
分辨率定义为:能被分辨开来的两个物点(或像点)之间的最小距离,称为镜头的物方分辨率,记为Resolution(物)(或像方分辨率,记为Resolution(像))。单位为µm。
Resolution(物) = 0.61 x Wavelength/NA=1.22 x Wavelength x Fno.
Resolution(像) = 镜头放大倍率x Resolution(物)
解像力定义为:1mm内的黑白线对数, 记为Resolving power。单位为line/mm或lp/mm.
Resolving power = 1/ Resolution(像)
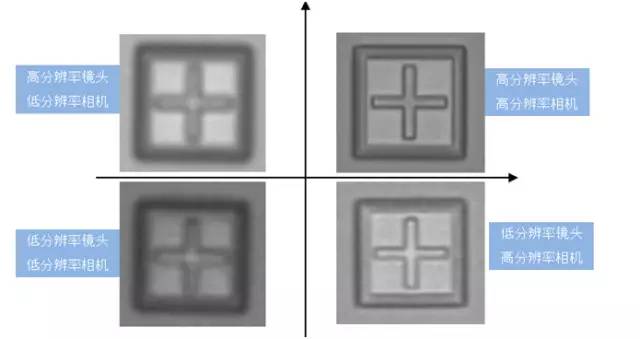
提到分辨率,大部分工程师会想到相机分辨率,而忽略镜头的分辨率对最终成像效果也起到关键作用。事实上,只有镜头分辨率和相机分辨率匹配,才能得到最佳成像效果。下图直观的表示出镜头和相机匹配对成像效果的影响。
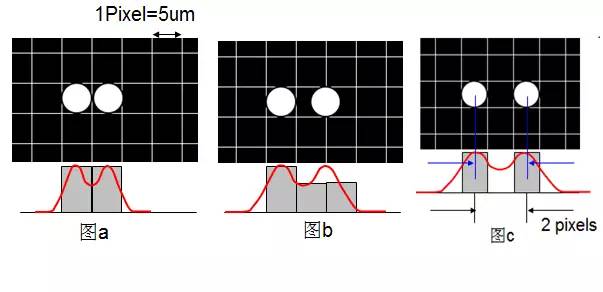
那么镜头分辨率跟相机分辨率如何才能匹配呢?我们知道,物体是成像在相机芯片上的,物方的两个点,经过镜头系统成像在相机芯片上的最小距离,只有如图c所示时才能被分辨开来。若物方两点成像在芯片上的距离如图a, 图b所示时,这两点都不能被分辨开来。因此镜头的像方分辨率=2x像元尺寸时,说明此时镜头分辨率与相机完全匹配。如相机像元尺寸为5um, 镜头放大倍率为0.5倍。则有Resolution(物)=2x5µm/0.5=20µ m时,镜头与相机完全匹配。若Resolution(物)<20µm, 说明此时镜头过好,相机分辨率将成为系统的限制;若Resolution(物)>20µm, 说明此时相机过好,镜头分辨率将成为系统限制。
另外,镜头的物方分辨率与产品的精度也常被工程师混淆。
精度指的是测量值与真实值之间的差异。如产品真实值为1.0mm, 要求精度为±5µm, 则说明只要测量出的值在0.995mm~1.005mm间即为合格品。在机器视觉中通常根据客户的FOV和精度要求算出相机的分辨率(如200万像素),相机一旦选定,则相机的像元尺寸(如4.65µm)也确定了。选镜头时即可根据上面的方法来选择分辨率匹配此相机的镜头,从而保证系统的精度要求。
而如果客户描述的是需要观察到物方大小为5µm的目标,则要求镜头的物方分辨率必须<10µm。
法兰距离及镜头接口
今天先给大家介绍一下法兰距离,继而介绍茉丽特镜头(或搭配的相机)中常见的几种接口,以及加接圈的原则和意义。
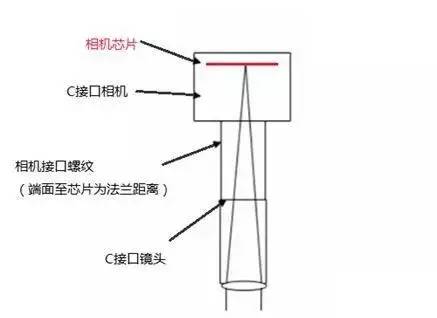
所谓法兰距离,就是指相机机身与镜头接触的机械面到相机芯片之间的距离。镜头的后截距需和相机的法兰距离对应,才能让光线聚焦在相机芯片上。
通常,工业相机接口有C接口、CS接口、F接口、M72接口、M95接口等等。除F接口外,其他接口一般用螺纹的尺寸规格去定义,并且会有特定的法兰距离,而F接口则为卡扣式的接口。
以C接口为例,它的螺纹规格是1英寸直径,螺纹是32牙/英寸,可以兼容使用于最大4/3”芯片的工业相机(对角线长度约22.6mm)。C接口相机的法兰距离为17.526mm,需配合C接口的镜头使用,如下图——
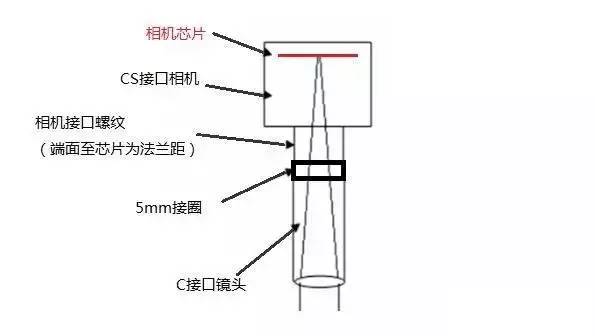
而CS接口,螺纹规格和C接口相同,但是法兰距离为12.526mm,比C接口短5mm,因此 C接口镜头配合CS接口相机时,需要加一个5mm的接圈,否则成像位置会在芯片之后,如下图——
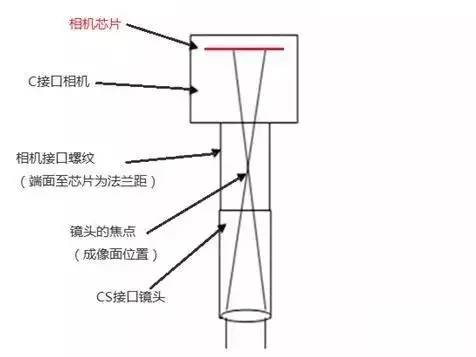
值得注意的是,如果要成像,必须保证镜头设计的法兰距离大于相机的法兰距离。例如,如果一个CS接口镜头,搭配一个C接口的相机,就会出现以下情形而无法使用——
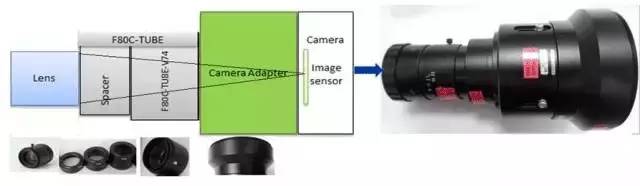
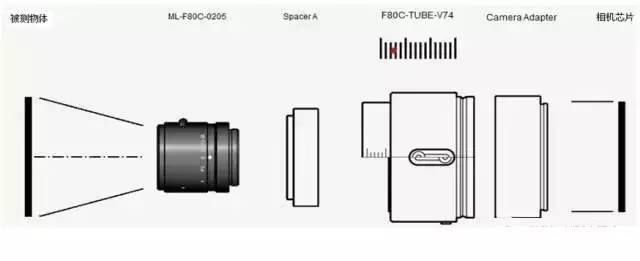
对于线扫镜头或大面阵镜头,通常其后截距比较大, 这样也可以兼容市面上的各种不同法兰距离的线扫描/大面阵相机。例如下图是茉丽特的F80C系列镜头的接圈方式,通过加不同厚度的接圈,可以与法兰距离为46.5mmF口相机,或法兰距离仅有6.56mm的M72接口相机及其他更多的相机匹配。使用时,我们需要根据所选用相机的型号去选择对应的接圈方式,因此通常情况下,线扫镜头的接圈的接法会相对复杂。
对于每个系列的线扫镜头产品,我们都会注明接圈的方式。如有疑问,欢迎联系我们的技术支持。
畸变
畸变作为光学系统中经常提到的一个参数,是限制光学量测准确性的重要因素之一。它是光学系统对物体所成的像相对于物体本身而言的失真程度,只引起像的变形,对像的清晰度并无影响。
对于理想光学系统,在一对共轭的物像平面上,放大率是常数。但是对于实际的光学系统,仅当视场较小时具有这一性质,而当视场较大或很大时,像的放大率就要随视场而异,这样就会使像相对于物体失去相似性。这种使像变形的成像缺陷称为畸变。
畸变定义为实际像高与理想像高差,而在实际应用中经常将其与理想像高之比的百分数来表示畸变,称为相对畸变,即
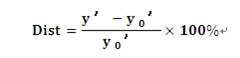
有畸变的光学系统,若对等间距的同心圆物面成像,其像将是非等间距的同心圆。当系统具有正畸变时,实际像高随视场的增大比理想像高增大得快,即放大倍率随视场的增大而增大,则同心圆的间距自内向外逐渐增大;反之,当为负畸变时,圆的间距自内向外逐渐减小。对于普通的光学镜头,只要感觉不出它所成像的变形,这种成像缺陷就可忽略;但是对于某些要利用像来测定物体大小尺寸的应用,畸变的影响就非常重要了,它直接影响测量精度。
普通工业镜头的畸变一般在1%~2%,这样的畸变通常会影响检测精度(例如实际长度为100mm的物体,使用这种镜头测得的尺寸可能是101mm~102mm;而我们BTOS远心光学的双远心镜头,畸变一般都小于0.1%,畸变系数为普通镜头的1/20,大大提高了检测精度和稳定性,达到了目前最高标准光学测试仪器的测量极限。
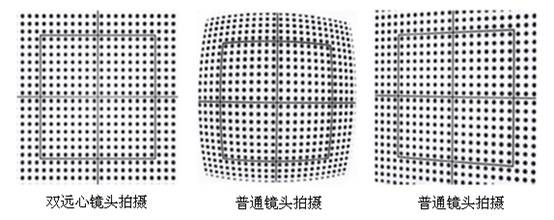
左图为双远心镜头拍摄的畸变测试图,完全无径向畸变或梯形畸变;中图为明显径向畸变;右图为明显梯形畸变。
审核编辑:汤梓红
-
镜头
+关注
关注
3文章
548浏览量
26854 -
相机
+关注
关注
5文章
1634浏览量
56076 -
分辨率
+关注
关注
2文章
1133浏览量
43420 -
机器视觉
+关注
关注
166文章
4851浏览量
126704
原文标题:机器视觉光学基础概念系列——视场、分辨率、法兰距离、镜头接口、畸变
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机器视觉的镜头选择
机器视觉的辅助光学器件介绍
【微信精选】科普机器视觉的应用和发展前景
四元数数控:深圳机器视觉检测定位系统在包装行业里有什么应用?

机器视觉中那些你不知道的光学知识

EtherCAT科普系列(8):EtherCAT技术在机器视觉领域的应用

机器视觉光学基础概念——眩光、鬼影与热点




评论