 运动控制系统反馈环节介绍
运动控制系统反馈环节介绍
反馈环节
此处的反馈环节是使用的增量式旋转编码器(常见旋转编码器分为绝对式和增量式感兴趣的小伙伴自己去了解吧);
T法、M法作为信号处理的方式(数字测速方法有三种:T法、M法、M/T法;还有分辨率和测速误差率这一类的知识感兴趣的同学自己去找书研究研究)关于编码器,已经在硬件篇做过分析,不理解的可以去我第一篇博文查看
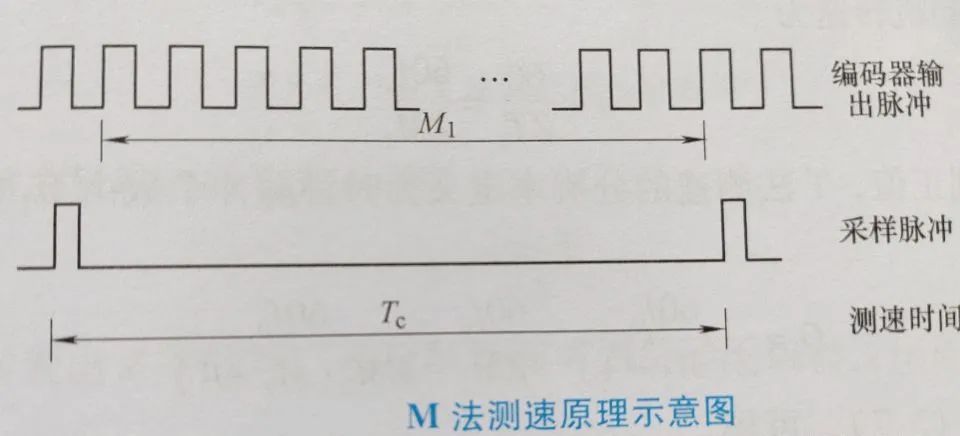
这里主要分析下M法测速和T法测速,电机每转一圈编码器(智能车中的电机圈和编码器圈数不是1:1,需要根据齿数比换算)共产生Z个脉冲,编码器输出脉冲的频率f1 = M1 / Tc。
M法测速:
M法测速:在一定的时间Tc内测取旋转编码器输出的脉冲个数M1,用以计算这段时间内的转速,称为M法测速。
由系统的定时器按照采样周期的时间定时一段时间,这里我们假设为Tc=1s,利用单片机的计数器捕获编码器在此段时间内产生的上升沿或者下降沿个数M1这里假设为1024,设电机旋转一圈,编码器产生512个脉冲
则此时转速为:
n = M1 / Z*Tc = 1024 / 512×1 单位:r/s
n1 = 2 r/s
M法总结:定时一段时间Tc,记录下此段时间内产生的脉冲数M1,再用电机运动一圈的脉冲数Z联立可以得到n=M1 / Z*Tc。
T法测速
T法测速是测出旋转编码器两个输出脉冲之间的间隔时间来计算转速,也被称为周期法测速。
T法测速其实就是采集编码器两个相邻上升沿或者下降沿所用时间
Tt=M2 / f0 ;
M2可以理解成在编码器第一个上升沿开始计数到第二个上升沿到来时停止计数的时钟周期个数;
f0可以理解为单片机的时钟脉冲频率;
此处为方便理解,假设1s时间单片机时钟可以产生65536个时钟脉冲,而编码器此时两个上升沿之间的时钟脉冲个数为M2=65个,则此时编码器一个脉冲的时间
Tt = 65/(65536/1)=0.001s
则此时的转速满足:n = f0 / Z*M2
所以:n2 = 65536 / 512 * 65 = 1.97 r/s

小结:
T法M法计算的都是转速,如果想要得到实际速度还需要知道车轮旋转一周小车的前进距离。
但是对于智能车而言,实际速度的参考价值和单位时间内的脉冲数的参考价值一样,都能反映出车身速度,这两者之间也仅仅相差一个机械结构决定的比例。
所以怕麻烦的同学可以直接选取脉冲数作为速度量进行控制。数字测速方式还有一种M/T法测速,它可以很好地弥补T法和M发的缺点。
-
电机控制
+关注
关注
3543文章
1901浏览量
269367 -
运动控制
+关注
关注
4文章
593浏览量
33010 -
智能车
+关注
关注
21文章
405浏览量
77078
发布评论请先 登录
相关推荐
什么是运动控制系统
运动控制系统的定义与机电系统运动控制教程分享








 工商网监
工商网监
评论