 智能车方向控制典型环节分析
智能车方向控制典型环节分析
方向控制
典型环节对应

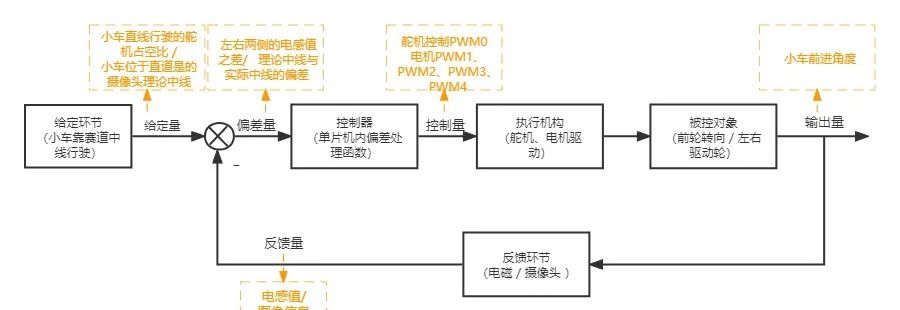
由于车模结构的不同,小车方向控制的各环节会有所区别,例如L车、B车的执行结构只有舵机;F车、E车的执行机构只有驱动轮;
而C车的执行机构既有舵机又有驱动轮。这里以C车为例,各自动控制系统环节与小车实际对应关系如下图所示:
典型环节分析
给定环节与给定量
给定环节可以理解为电磁模块和摄像头模块,给定量可以理解为小车位于直道行驶是的舵机控制占空比值或者摄像头的理论中线值。
比较环节与偏差量
比较环节在智能车系统中可以理解为单片机的偏差计算函数,偏差量就是该函数计算出的误差值。下面是电磁偏差计算代码片。
// 此代码一般放在定时其中断,保证偏差计算的时序稳定
//电感采集获取赛道信息,三电感 000 000 000 //
L=adc_once(ADC_P00, ADC_10BIT);//左电感值
M=adc_once(ADC_P01, ADC_10BIT);//中间电感值
R=adc_once(ADC_P05, ADC_10BIT);//右电感值
My_Direction.NowError=50*(R-L)/(L+M+R);//**差比和**计算偏差
//My_Direction.NowError就是偏差量
而摄像头的偏差量主要是通过计算前瞻的数值与理想中值的差值或者计算曲率来获取,这个部分打算后面专门出一篇描述摄像头的文章,在此不做详细描述。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模块
+关注
关注
7文章
2696浏览量
47439 -
智能车
+关注
关注
21文章
403浏览量
76954
发布评论请先 登录
相关推荐
基于虚拟仪器技术的智能车仿真系统
针对“飞思卡尔”杯全国大学生智能车邀请赛,本文开发了基于LabVIEW虚拟仪器技术的Plastid仿真系统,该系统可针对不同的赛车、赛道、路径识别方案、控制策略等内容,进行相关分析,大大提高智
发表于 03-07 10:32
智能车设计基础
智能车设计基础 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能车设计基础 第3章.rar: http://www.t00y.com
发表于 10-21 21:11
触屏寻迹智能车使用“安芯一号”SLH89F5162
坐标给受控端(基于“安芯一号”的智能车)受控端主要实现用户路径的识别、机器人行进速度和方向的确定等,并将最终的速度、方向计算结果通过无线方式发送到小车控制板,以实现
发表于 10-15 12:46
labview智能车参考程序(fuzzy 控制)
最近在做智能车的材料,想用Labview实现控制,发现了例程中的这个用模糊算法控制倒车的程序文件,感觉受益很大,特意发到这里,希望有需要的同学也能有点收获。
发表于 02-05 14:55
树莓派智能车AlphaBot系列教程
;catid=57树莓派智能车AlphaBot教程1:人生若只如初见 ...树莓派智能车AlphaBot教程2:直流电机控制 ... 树莓派智能车AlphaBot教程3:避障树莓派
发表于 05-15 15:39
智能车制作相关资料分享
朋友组队前言 此篇献给GDOU的学子们,或许不是那么政治正确一、智能车是什么智能车总体概要智能车是大学生团体比赛,通常由三个人组成队伍。涉及多个领域的知识,包括计算机编程,涉及电路板,队友间的团队协作,
发表于 01-17 07:48
电磁智能车原理
环境感知、规划决策和运动控制三大部分,涵盖了自动控制、模式识别、传感技术、电子、计算机、机械、能源等多个学科知识。 电磁智能车想要正常行驶在赛道上,必定是需要实时根据赛道的状态来调整车身姿态的,那么电磁






 工商网监
工商网监
评论