 方向控制中舵机值及限幅
方向控制中舵机值及限幅
舵机中值及限幅
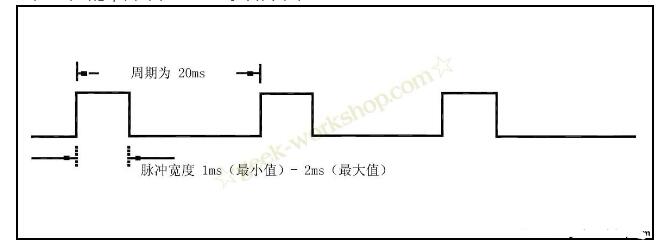
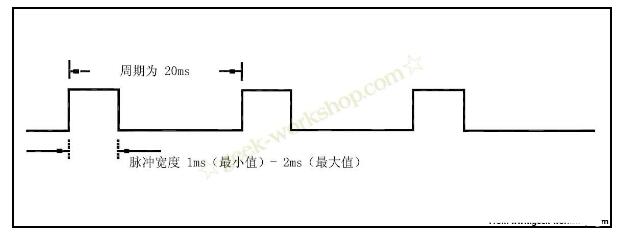
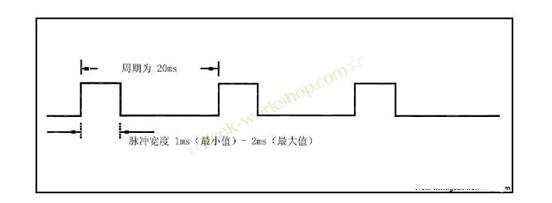
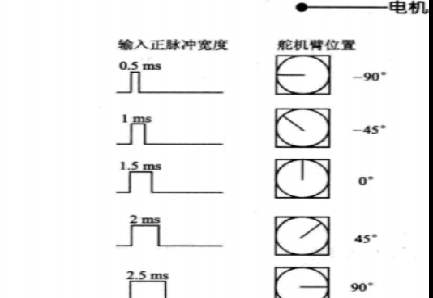
S3010舵机位于理论中值时一个周期的高电平时间应该为1.52ms由此可得占空比为7.6%,由此可以推算出单片机的对应占空比值,假设pwm时钟频率为30Mhz
则:计时20ms需要计数30 000 000/1000×20=600 000次
Duty= 7.6%×周期为10ms时的总计数值 (一个周期需要计数300 000次)
则舵机理论中值对应的PWM高电平计数个数为:Duty_mid=45 600;
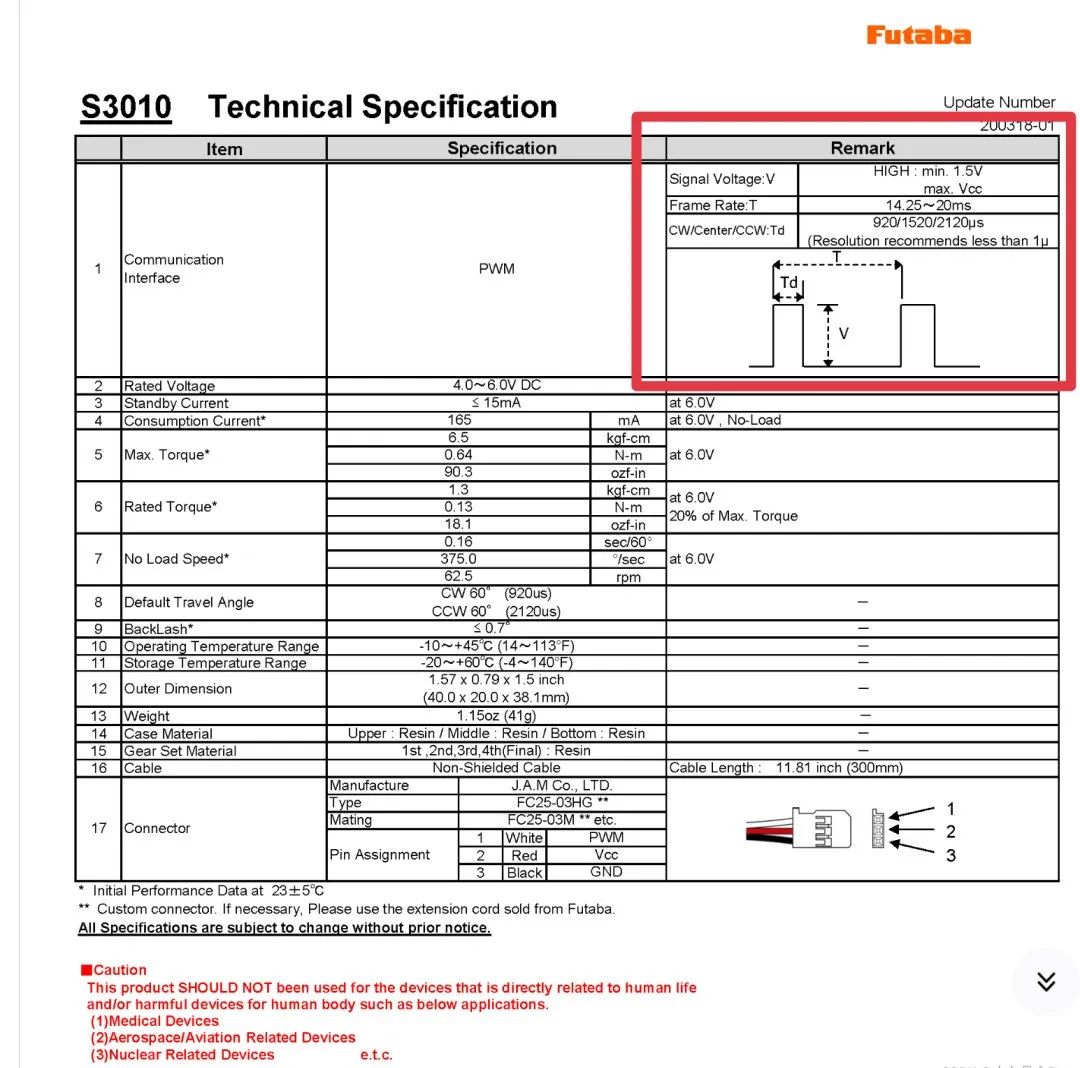
注意一定是让舵机到达理论中值后再安装转向机构,还需要借助按键找出舵机的左右极限值,并且在程序内部要写限幅,保护舵机避免被烧。
舵机初始化及输出控制函数。
/*******************************************************************************
* 函数名 :Steering_Init
* 描述 :舵机初始化
* 参数 :
freq PWM频率(10Hz-3MHz)
angl
*******************************************************************************/
void Steering_Init(uint32 freq, int16 angl)
{
pwm_init(PWMB_CH1_P74,freq,angl); //PWMA初始化
}
转向控制
根据控制器计算的控制量,通过一定比例给到舵机的PWM输出,从而实现舵机的打角 代码。
//转向限制幅度
if(Price_PWM >=500) Price_PWM=500;
if(Price_PWM<=-500) Price_PWM=-500;
Steering_Angl(Price_PWM/2);//输出到舵机打角
被控对象与被控量
整个方向控制系统的被控对象是小车的转向机构,也就是舵机和左右驱动轮,而被控量就是小车的前进角度。
反馈对象与反馈量
在方向控制系统中,反馈对象是摄像头和电磁模块,而对应的反馈量是电感值和前瞻中心值。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
智能车
+关注
关注
21文章
403浏览量
77000 -
舵机
+关注
关注
17文章
277浏览量
41092
发布评论请先 登录
相关推荐
小车电机和舵机控制相关资料分享
本文链接地址:小车电机和舵机控制通过运动学方程,从Move_X, Move_Y, Move_Z中求解出阿克曼小车电机MOTOR_A,MOTOR_B的目标速度值和
发表于 07-05 06:01
数字舵机控制原理是什么_数字舵机与模拟舵机的区别
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟
舵机转速与电压之间的关系
来源:电子森林 舵机 在自动控制场合被广泛应用。舵机的输出力矩、转动速度、命令更新频率等标准了舵机的工作性能。在 全国大学生智能车竞赛中 ,
用stm32控制舵机——以stm32F103C8T6为例
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。使用stm32控制机器时,经常要用到舵机,如使某个部位转到特定的角度,或者在行进过程
发表于 12-24 19:35
•108次下载

智能车方向控制舵机PWM技术
舵机 舵机是一种位置(角度)伺服的驱动器,我们可以通过给信号脚不同的占空比来让舵机进行打角进而控制小车方向。 例如C车的S3010
舵机在无人机中的作用
随着科技的飞速发展,无人机已经成为现代生活中不可或缺的一部分。它们在军事、商业和个人娱乐等多个领域发挥着重要作用。在无人机的众多组件中,舵机扮演着至关重要的角色。 舵机的基本功能 1.





 工商网监
工商网监
评论