 ROS中如何设置消息信息
ROS中如何设置消息信息
设置消息信息
ROS 消息是结构。可以直接复制它们以生成新的消息。副本和原始消息都有自己的数据。创建一条类型为geometry_msgs/Twist的消息。
twist = rosmessage("geometry_msgs/Twist","DataFormat","struct")
twist = struct with fields:
MessageType: ‘geometry_msgs/Twist’
Linear: [1x1 struct]
Angular: [1x1 struct]
缺省情况下,此消息的数字字段初始化为0。您可以修改此消息的任何属性。例如Y等于5。
twist.Linear.Y = 5;
查看消息数据以确保您的更改生效
twist.Linear
ans = struct with fields:
MessageType: ‘geometry_msgs/Vector3’
X: 0
Y: 5
Z: 0
一旦用您的数据填充了消息,您就可以将其用于发布者、订阅者和服务。
参见“与ROS发布者和订阅者交换数据”和“调用和提供ROS服务”示例。然后就可以通过publish发布我们设置的消息信息了
thermometerNode = ros2node("/thermometer");
tempPub = ros2publisher(thermometerNode,"/twist","sensor_msgs/geometry_msgs/Twist");
tempMsgs(10) = twist; % Pre-allocate message structure array
for iMeasure = 1:10
% Copy blank message fields
tempMsgs(iMeasure) = twist;
% Record sample message
tempMsgs(iMeasure).Linear.Y = 20+randn*3;
% Only calculate the variation once sufficient data observed
if iMeasure >= 5
tempMsgs(iMeasure).Linear.X= var([tempMsgs(1:iMeasure).Linear.Y]);
end
% Pass the data to subscribers
send(tempPub,tempMsgs(iMeasure))
end
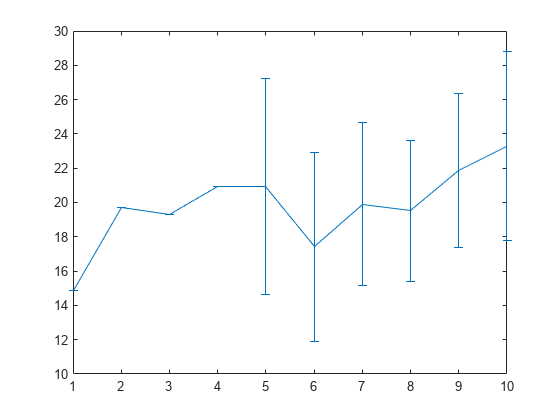
errorbar([tempMsgs.Linear.Y],[tempMsgs.Linear.X])
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
matlab
+关注
关注
185文章
2976浏览量
230482 -
数据
+关注
关注
8文章
7030浏览量
89038 -
ROS
+关注
关注
1文章
278浏览量
17010
发布评论请先 登录
相关推荐
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
ROS与RPLIDAR结合使用说明及问题汇总
相应论文和代码中涉及的算法原理和算法实现。 5. rplidar相关问题汇总与说明: 5.1树莓派等单板系统出现雷达无法启动,请检查是否是供电不足导致的问题。5.2rplidar_ros启动前需要设置
发表于 09-07 16:27
在Android中使用ROS
由于ROS提供了Android的对应的开发库,我们可以方便的在Android中开发相应的ROS客户端程序。下面介绍一下在Android中使用ROS库的方法。1. 开发环境配置Andro
发表于 05-16 19:16
ROS与STM32之间的联系
、在ROS小车里面有两个核心控制器,一个是ROS主控,一个是stm32控制器3、ROS主控是树莓派等,只要能在ROS上面将ROS系统跑起来都
发表于 06-28 07:49
如何在ROS2中运行小乌龟呢
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-05 06:08
基于FreeRTOS的micro(微型)ROS
编辑整理:strongerHuang 作者:Francesca Finocchiaro 关注我的读者中应该有部分是做ROS相关的工作,今天就来分享一个基于FreeRTOS的micro(微型)ROS

ROS中的序列化实现
理解了序列化,再回到ROS。我们发现,ROS没有采用第三方的序列化工具,而是选择自己实现,代码在roscpp_core项目下的roscpp_serialization中,见下图。这个功能涉及的代码量
ROS中XMLRPC是什么
XMLRPC是什么? 关于ROS节点建立连接的技术细节,官方文档说的非常简单,在这里ROS Technical Overview。没有基础的同学看这个介绍必然还是不懂。 在ROS中,节
如何初始化ROS并创立链接
Simulink对机器人操作系统(ROS)的支持使我们能够创建与ROS网络一起工作的Simulink模型。ROS是一个通信层,允许机器人系统的不同组件以消息的形式交换信息。 组件通过将
ROS中的TF该如何使用
TF命令行操作 ROS中的TF该如何使用呢?我们先通过两只小海龟的示例,了解下基于坐标系的一种机器人跟随算法。 小海龟跟随例程 这个示例需要我们先安装相应的功能包,然后就可以通过一个launch文件
ros的基本概念是什么
基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。
ROS2中自带例程测试
的一个例程。 和刚才一样打开两个终端,这里我们需要source一下ROS里的环境变量。 该环境变量我们刚才已经设置了过软连接,所以配置过程中它也会配置ROS2的功能包路径。 在终端1输

在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2

ros怎么设置环境变量
可以使用的动态的值,用于影响运行程序的行为。环境变量通常包含一些关键信息,如路径、用户名、颜色选项等。 在ROS中,环境变量是重要的,因为它们用于确定ROS如何运行和找到相关文件和程序





 工商网监
工商网监
评论