 如何将ROS数据类型转换为MATLAB数据类型
如何将ROS数据类型转换为MATLAB数据类型

** Message数据转化**
由于在Matlab中,ROS消息的每个元素是独立的,因此无法验证具有多个值在数学层面上的有效性。因为每个值都可以单独设置,所以消息不会将属性作为一个整体进行验证。
例如,四元数消息包含w、x、y和z属性,但该消息并不强制四元数作为一个整体是有效的。所以有可能在单独修改一个四元数信息后,这个四元数是不符合模型的。
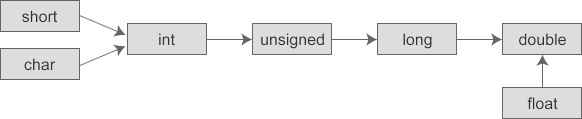
同时消息属性还可以具有各种数据类型。MATLAB使用ROS设置的规则来确定这些数据类型。
为此,这些数据类型必须映射到MATLAB数据类型才能在MATLAB中使用。下表总结了如何将ROS数据类型转换为MATLAB数据类型。

同时在Matlab中也自带了一些常用的msg包,这些包包含了常用的消息类型、服务类型或操作类型。可以在MATLAB命令窗口中调用rosmsg list查看,当然也可以通过第二讲提到的方法。
通过ROS Toolbox的ROS自定义消息支持来生成新的消息定义。同时值得注意的是,在指定消息类型时,输入字符向量必须与rosmsg列表中列出的字符向量完全匹配。
ackermann_msgs
actionlib
actionlib_msgs
actionlib_tutorials
adhoc_communication
app_manager
applanix_msgs
ar_track_alvar
arbotix_msgs
ardrone_autonomy
asmach_tutorials
audio_common_msgs
axis_camera
base_local_planner
baxter_core_msgs
baxter_maintenance_msgs
bayesian_belief_networks
blob
bond
brics_actuator
bride_tutorials
bwi_planning
bwi_planning_common
calibration_msgs
capabilities
clearpath_base
cmvision
cob_base_drive_chain
cob_camera_sensors
cob_footprint_observer
cob_grasp_generation
cob_kinematics
cob_light
cob_lookat_action
cob_object_detection_msgs
cob_perception_msgs
cob_phidgets
cob_pick_place_action
cob_relayboard
cob_script_server
cob_sound
cob_srvs
cob_trajectory_controller
concert_msgs
control_msgs
control_toolbox
controller_manager_msgs
costmap_2d
create_node
data_vis_msgs
designator_integration_msgs
diagnostic_msgs
dna_extraction_msgs
driver_base
dynamic_reconfigure
dynamic_tf_publisher
dynamixel_controllers
dynamixel_msgs
epos_driver
ethercat_hardware
ethercat_trigger_controllers
ethzasl_icp_mapper
explorer
face_detector
fingertip_pressure
frontier_exploration
gateway_msgs
gazebo_msgs
geographic_msgs
geometry_msgs
gps_common
graft
graph_msgs
grasp_stability_msgs
grasping_msgs
grizzly_msgs
handle_detector
hector_mapping
hector_nav_msgs
hector_uav_msgs
hector_worldmodel_msgs
household_objects_database_msgs
hrpsys_gazebo_msgs
humanoid_nav_msgs
iai_content_msgs
iai_kinematics_msgs
iai_pancake_perception_action
image_cb_detector
image_exposure_msgs
image_view2
industrial_msgs
interaction_cursor_msgs
interactive_marker_proxy
interval_intersection
jaco_msgs
joint_states_settler
jsk_footstep_controller
jsk_footstep_msgs
jsk_gui_msgs
jsk_hark_msgs
jsk_network_tools
jsk_pcl_ros
jsk_perception
jsk_rviz_plugins
jsk_topic_tools
keyboard
kingfisher_msgs
kobuki_msgs
kobuki_testsuite
laser_assembler
laser_cb_detector
leap_motion
linux_hardware
lizi
manipulation_msgs
map_merger
map_msgs
map_store
mavros
microstrain_3dmgx2_imu
ml_classifiers
mln_robosherlock_msgs
mongodb_store
mongodb_store_msgs
monocam_settler
move_base_msgs
moveit_msgs
moveit_simple_grasps
multimaster_msgs_fkie
multisense_ros
nao_interaction_msgs
nao_msgs
nav_msgs
nav2d_msgs
nav2d_navigator
nav2d_operator
navfn
network_monitor_udp
nmea_msgs
nodelet
object_recognition_msgs
octomap_msgs
p2os_driver
pano_ros
pcl_msgs
pcl_ros
pddl_msgs
people_msgs
play_motion_msgs
polled_camera
posedetection_msgs
pr2_calibration_launch
pr2_common_action_msgs
pr2_controllers_msgs
pr2_gazebo_plugins
pr2_gripper_sensor_msgs
pr2_mechanism_controllers
pr2_mechanism_msgs
pr2_msgs
pr2_power_board
pr2_precise_trajectory
pr2_self_test_msgs
pr2_tilt_laser_interface
program_queue
ptu_control
qt_tutorials
r2_msgs
razer_hydra
rmp_msgs
robot_mechanism_controllers
robot_pose_ekf
roboteq_msgs
robotnik_msgs
rocon_app_manager_msgs
rocon_service_pair_msgs
rocon_std_msgs
rosapi
rosauth
rosbridge_library
roscpp
roscpp_tutorials
roseus
rosgraph_msgs
rospy_message_converter
rospy_tutorials
rosruby_tutorials
rosserial_arduino
rosserial_msgs
rovio_shared
rtt_ros_msgs
s3000_laser
saphari_msgs
scanning_table_msgs
scheduler_msgs
schunk_sdh
segbot_gui
segbot_sensors
segbot_simulation_apps
segway_rmp
sensor_msgs
shape_msgs
shared_serial
sherlock_sim_msgs
simple_robot_control
smach_msgs
sound_play
speech_recognition_msgs
sr_edc_ethercat_drivers
sr_robot_msgs
sr_ronex_msgs
sr_utilities
statistics_msgs
std_msgs
std_srvs
stdr_msgs
stereo_msgs
stereo_wall_detection
tf
tf2_msgs
theora_image_transport
topic_proxy
topic_tools
trajectory_msgs
turtle_actionlib
turtlebot_actions
turtlebot_calibration
turtlebot_msgs
turtlesim
um6
underwater_sensor_msgs
universal_teleop
uuid_msgs
velodyne_msgs
view_controller_msgs
visp_camera_calibration
visp_hand2eye_calibration
visp_tracker
visualization_msgs
wfov_camera_msgs
wge100_camera
wifi_ddwrt
wireless_msgs
yocs_msgs
zeroconf_msgs
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
matlab
+关注
关注
189文章
3033浏览量
239520 -
数据类型
+关注
关注
0文章
238浏览量
14255 -
ROS
+关注
关注
1文章
296浏览量
18915
发布评论请先 登录
相关推荐
热点推荐
1-D数组波形(DBL)是什么样的数据类型,如何将其转换为波形(DBL),和数组
请问,1-D数组波形(DBL)是什么样的数据类型,如何将其转换为波形(DBL),和数组
发表于 11-10 15:48
Windows -编程-数据类型
Windows -编程-数据类型Rust 中的每个值都有特定的数据类型,它告诉 Rust 指定了什么样的数据,以便它知道如何处理这些数据。我们将
发表于 08-24 14:30
vhdl数据类型
VHDL中的标识符可以是常数、变量、信号、端口、子程序或参数的名字。VHDL中的数据类型可以分成四大类: 标量型(SCALAR TYPE):属单元素的最基本的数据类型,通常用于描述一个单值数据对象
发表于 03-30 15:59
•11次下载
Struct结构数据类型
Struct类型是一种由多个不同数据类型元素组成的数据结构,其元素可以是基本数据类型,也可以是Struct、数组等复杂数据类型以及PLC
结构数据类型(Struct)及应用案例
Struct数据类型使用非常灵活,随时可以使用,但是相对于PLC数据类型 (UDT) 有以下缺点,所以建议需要使用Struct类型时,可以使用PLC数据类型(UDT)代替。
什么是数据类型转换
常用的3种数据类型:1、Python数据类型第一种:字符串(str)。
2、Python数据类型第二种:整数(int)。
3、Python数据类型第三种:浮点数(float)。
定义数据类型
在运算之前我们必须首先定义出数据类型,定义出脚本支持的数据类型,这是运算的基础。
这一小节我们将定义出数据类型,在这里我们暂时定义四个数据类型:
GaussDB数据类型转换介绍
数据类型转换在实际应用中非常常见。GaussDB 作为一款企业级分布式关系型数据库,在实际业务场景使用中,也会避免不了数据类型的转换。以下是
ARRAY 数据类型的变量
中,系统将提供自动完成功能。 将打开“数组”对话框。 在“数据类型”文本框中,指定数组元素的数据类型。 在“ARRAY 限值”(ARRAY limits) 输入字段中,指定各维度的上限
PLC变量的数据类型整理
BYTE、WORD、DWORD、SINT、USINT、INT、UINT、DINT 和UDINT。
注意,当较长的数据类型转换为较短的数据类型时,会丢失高位信息
发表于 09-19 12:19
•7323次阅读
Redis的数据类型有哪些
Redis的数据类型有哪些?有五种常用数据类型:String、Hash、Set、List、SortedSet。以及三种特殊的数据类型:Bitmap、HyperLogLog、Geospatial
plc数据类型怎么理解和应用
PLC(可编程逻辑控制器)是一种工业自动化设备,用于控制机械和工业过程。在PLC编程中,数据类型是非常重要的概念,因为它决定了程序中数据的存储和处理方式。正确理解和应用PLC数据类型是编写有效、可靠



评论