 LQR横向控制算法的求解
LQR横向控制算法的求解
LQR 横向控制算法的求解
期望的响应特性就是 跟踪偏差能够快速、稳定地趋近于零,并保持平衡,同时前轮转角控制输入又尽可能小,这就是一个典型的多目标优化最优控制问题。
且优化的目标函数可以表示为跟踪过程累计的跟踪偏差与累计的控制输入的加权和。
如式(3-21)所示:

其中, Q为半正定的状态加权矩阵, R为正定的控制加权矩阵,且 Q,R通常取为对角阵
Q矩阵元素变大意味着希望跟踪偏差能够快速趋近于零,R矩阵元素变大意味着希望控制输入能够尽可能小
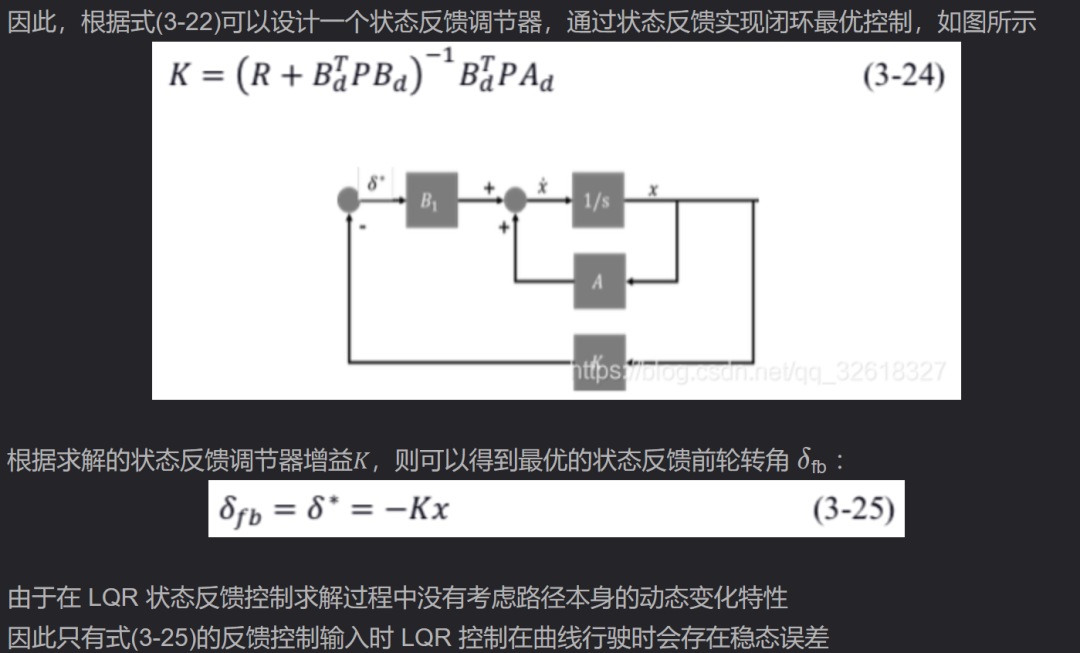
由于在 LQR 状态反馈控制求解过程中没有考虑路径本身的动态变化特性,因此只有式(3-25)的反馈控制输入时 LQR控制在曲线行驶时会存在稳态误差。
稳态误差是系统从一个稳态过渡到新的稳态,或系统受扰动作用又重新平衡后,系统出现的偏差。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
反馈控制
+关注
关注
0文章
61浏览量
20907 -
无人驾驶
+关注
关注
98文章
4057浏览量
120469 -
LQR
+关注
关注
1文章
6浏览量
3144
发布评论请先 登录
相关推荐
LQR线性二次调制系统的记录
LQR 控制本blog主要记录LQR 线性二次调制系统的,学习教程为两个B站的教学视频。状态空间4-LQR控制 MATLAB官方教程视频链接
发表于 08-30 08:00
一种求解关键路径的新算法
通过定义节点编码图概念,提出一种不需要拓扑排序的求解关键路径的新算法。该算法扩充图的邻接表的存储结构,使图的存储与算法求解过程共享同一存储空
发表于 04-23 10:29
•7次下载
基于LQR 的直升机最优控制系统的设计Design on a
设计了直升机LQR 最优控制系统,并针对LQR 控制中加权矩阵Q和R 难以确定的问题,进行了试验分析,从实际控制效果出发,找出了系统响应与Q
发表于 06-06 16:00
•19次下载
基于FPGA的横向LMS算法的实现
横向LMS算法是实现自适应数字波束形成的基本方法之一。提出了一种用Matab/Simulink中DSP Builder模块库设计算法模型,然后应用FPGA设计软件Modelsim 、QuartusII
发表于 12-07 14:03
•23次下载
基于故障树最小割集求解算法
故障树分析广泛应用于核工业、航空航天和交通控制等安全攸关领域的安全性分析。求解故障树的最小割集是故障树分析的关键步骤。目前,对于大规模故障树的最小割集的求解方法主要是将故障树转化为二元决策图之后
发表于 11-21 16:05
•10次下载
一种求解RTVKP问题的精确算法
随机时变背包问题(randomized time-varying knapsack problem,简称RTVKP)是一种动态背包问题,也是一种动态组合优化问题,目前其求解算法主要是动态规划的精确
发表于 01-03 10:27
•0次下载
求解#SMT问题的局部搜索算法
规模#SMT实例的求解器亟待解决.基于以上原因,设计了一种求解较大规模#SMT实例的近似求解器一一VolComputeWithLocalSearch.它在现有的#SMT精确求解
发表于 01-09 14:38
•0次下载
Apollo代码学习—MPC与LQR比较
MPC(Model Predictive Control,模型预测控制)和LQR(Linear–Quadratic Regulator,线性二次调解器) 在状态方程、控制实现等方面,有很多

基于车辆动力学模型的横向控制
线性二自由度动力学模型的构建 车辆路径跟踪偏差状态方程的构建 LQR 横向控制算法的求解 车辆线性二自由度动力学模型 对于基于车辆动力学模型

基于车辆运动学和动力学模型的横向控制算法
无模型的 PID 横向控制算法参数少,简单易用,但是由于没有考虑车辆系统动力学特性及路径本身的动态变化特性,对外界干扰的鲁棒性较差。 在高速或曲率较大的弯道场景时,会出现较大的跟踪误差和“画龙”现象





 工商网监
工商网监
评论