 四足机器人步态规划与接触状态
四足机器人步态规划与接触状态
0、步态规划
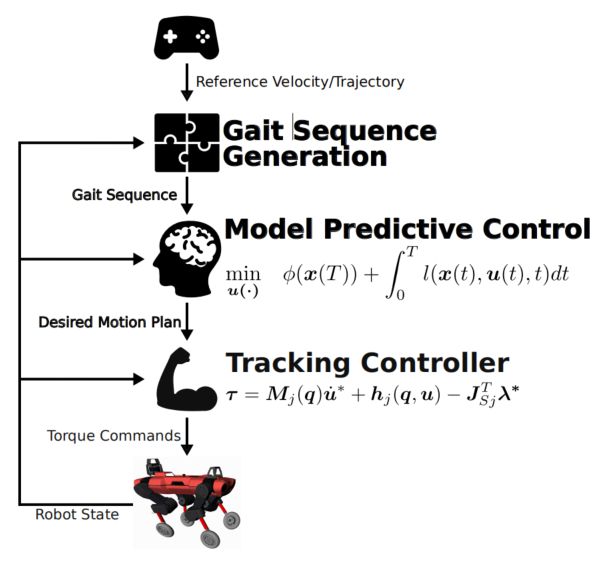
四足机器人控制当中,步态是至关重要的一项。我们可以简单理解成四足机器人运动过程中各腿的状态,在这套设计方案中,我们对步态的规划主要分成两大主要部分,即接触状态和周期函数。而步态规划的目的,就是创建一个关于的足端接触状态的周期函数。
1、接触状态
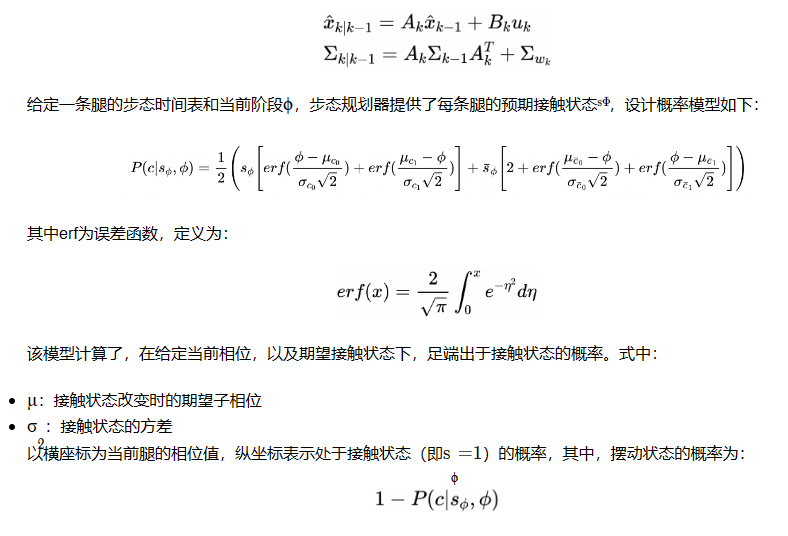
四足机器人行进过程中,根据足端与地面是否发生接触,我们可以规定各条腿的两种接触状态,即接触(contact)与摆动(swing)
总控制器会根据步态规划给出的状态,移交至对应的控制器去处理,即摆动腿控制器(swing leg controll),接触腿控制器(contact leg control)。
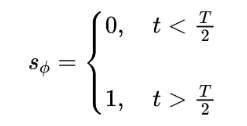
对于这两种状态,可以简单地用一个布尔类型的值s来定义,即

对于周期性的步态规划,我们可以用下标Φ来进行区分,可以写成:

2、步态周期
四足机器人的运动归根到底都是周期运动,我们无须量化机器人运动的整个过程,因此如何量化定义一个完整的步态周期显得极为重要,在此我们使用基于时间的周期函数,定义一个基准相位值,公式如下:
其中,
- t:当前运行时间
- t0:当前周期开始时间
- T:一个步态周期
同样我们可以利用取余的方法来简化上述周期函数,两者并无实质的区别:
其中
- %为取余运算
- t为当前运行时间
对于相同类型的周期信号,我们可以利用相位差来表征周期函数之间的差别,因此有了基准相位函数之后,我们就可以利用其来定义各条腿的相位,如下式:
其中,Φi,offset为第条腿与基准相位的相位差。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16361浏览量
178021 -
机器人
+关注
关注
211文章
28418浏览量
207076 -
四足机器人
+关注
关注
1文章
90浏览量
15202
发布评论请先 登录
相关推荐
四足机器人的机构设计
四足机器人属于复杂机电系统,需要综合生物、机械、电子、控制等学科内容,具体涉及仿生机构设计、灵巧运动机构设计、高性能驱动器制造,行走稳定性控制、强化学习等在内的多个研究方向。其中,机构设计是保障
发表于 09-15 06:54
平面液压双足机器人步态规划及阻抗控制研究说明
足式机器人的运动具有足与地面非连续接触的特点,这使得它对不平路面环境的适应性较强,可以应用在探险救灾等危险的任务中。与四
发表于 01-17 14:19
•15次下载
怎么样实现双足机器人参数化步态规划详细方法说明
合理规划,进行参数化建模研究,从而解决在不同步行环境中机器人的运行过程中的问题。本课题是在双足机器人平路行走的基础上对其参数化步态进行
发表于 03-23 16:56
•9次下载
如何实现双足机器人爬楼梯的步态规划与参数优化
爬楼梯时的步态规划问题作了以下几方面研究工作: 首先,回顾了双足机器人的发展历史和研究现状,并对目前主动型双足
发表于 04-07 16:27
•33次下载





 工商网监
工商网监
评论