 六自由度机械臂三次多项式插值法
六自由度机械臂三次多项式插值法
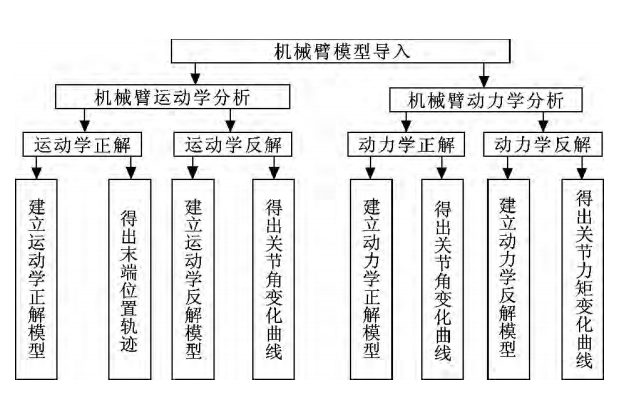
对串联机械臂而言,轨迹规划可以分为:关节空间轨迹规划和笛卡尔空间轨迹规划。关节空间轨迹规划是把机器人的关节变量变换成跟时间的函数,然后对角速度和角加速度进行约束。
笛卡尔空间轨迹规划是把机器人末端在笛卡尔空间的位移、速度和加速度变换成跟时间的函数关系。
由于在关节空间中进行轨迹规划是直接用运动时的受控变量规划轨迹,有着计算量小,容易实时控制,而且不会发生机构奇异性等优点,所以经常被采用。
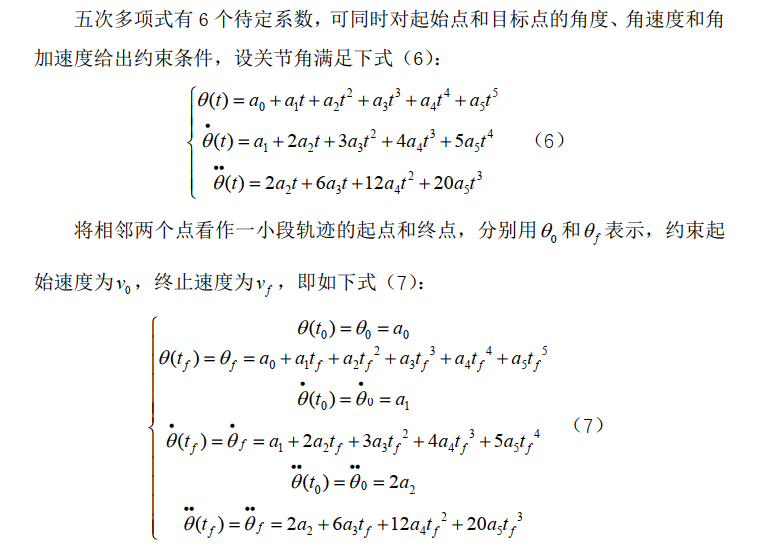
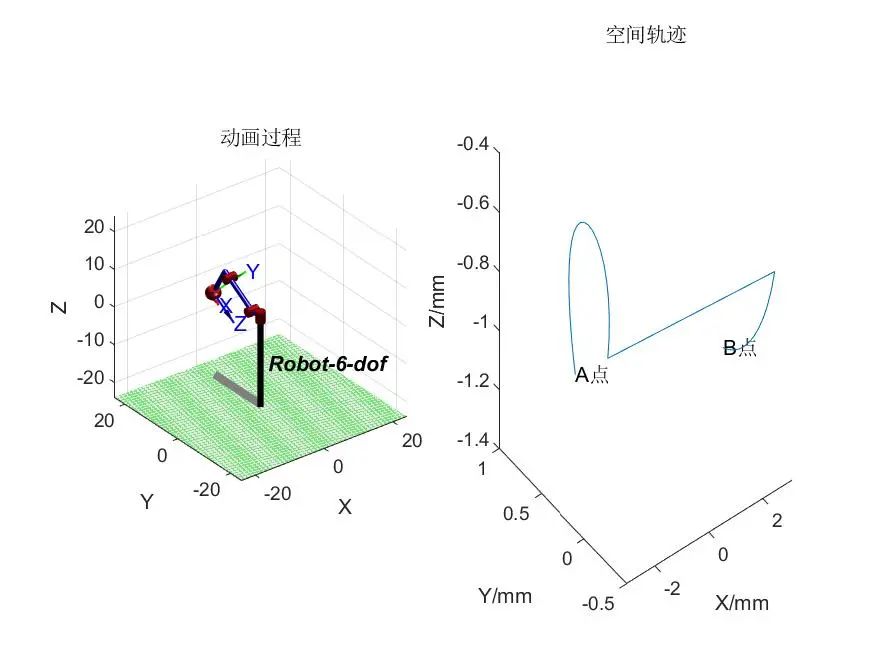
现以一维的轨迹为研究对象,利用三次多项式插值法和五次多项式插值法分别对其进行轨迹规划,通过对比两种插值法的效果,选取效果更优者对六自由度机械臂进行轨迹规划。
** 三次多项式插值法**
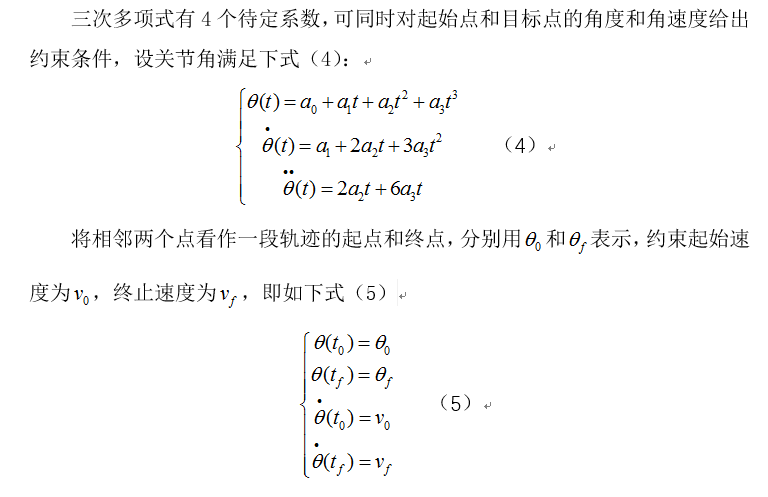
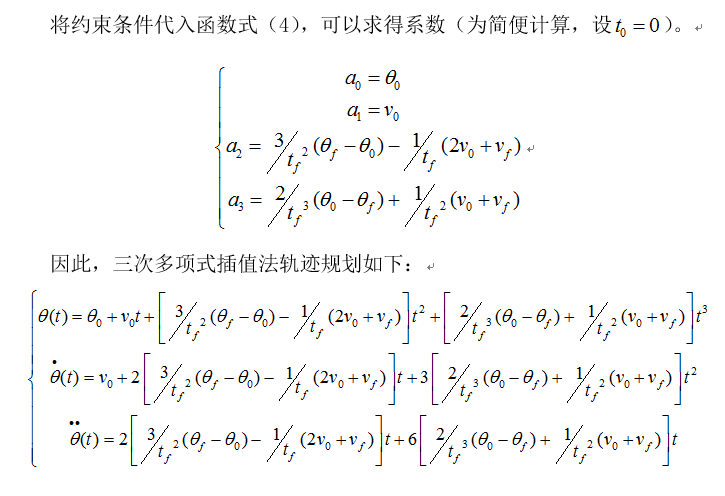
三次多项式有4个待定系数,可同时对起始点和目标点的角度和角速度给出约束条件。
数学推导
MATLAB代码
%三次多项式插值法
clear;
clc;
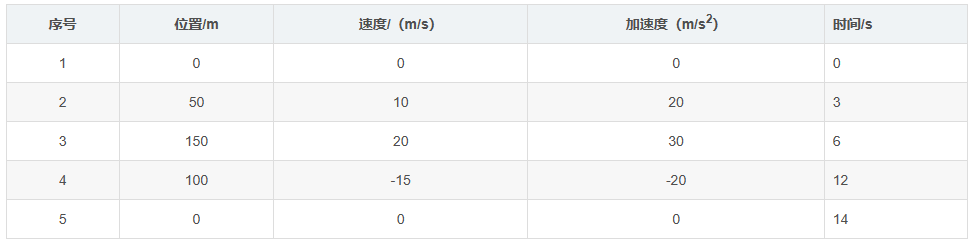
q_array=[0,50,150,100,0];%指定起止位置
t_array=[0,2,4,8,10];%指定起止时间
v_array=[0,10,20,-15,0];%指定起止速度
t=[t_array(1)];q=[q_array(1)];v=[v_array(1)];a=[0];%初始状态
for i=1:1:length(q_array)-1%每一段规划的时间
a0=q_array(i);
a1=v_array(i);
a2=(3/(t_array(i+1)-t_array(i))^2)*(q_array(i+1)-q_array(i))-(1/(t_array(i+1)-t_array(i)))*(2*v_array(i)+v_array(i+1));
a3=(2/(t_array(i+1)-t_array(i))^3)*(q_array(i)-q_array(i+1))+(1/(t_array(i+1)-t_array(i))^2)*(v_array(i)+v_array(i+1));
ti=t_array(i)+0.001:0.001:t_array(i+1);
qi=a0+a1*(ti-t_array(i))+a2*(ti-t_array(i)).^2+a3*(ti-t_array(i)).^3;
vi=a1+2*a2*(ti-t_array(i))+3*a3*(ti-t_array(i)).^2;
ai=2*a2+6*a3*(ti-t_array(i));
t=[t,ti];q=[q,qi];v=[v,vi];a=[a,ai];
end
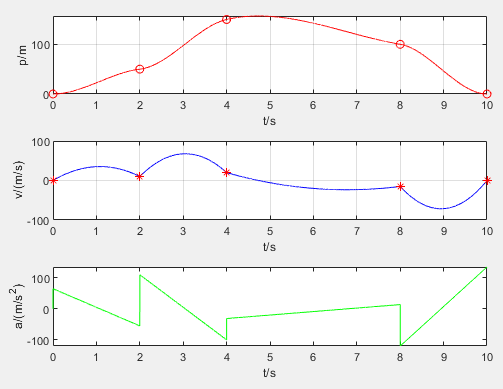
subplot(3,1,1),plot(t,q,'r'),xlabel('t/s'),ylabel('p/m');hold on; plot(t_array,q_array,'o','color','r'),grid on;
subplot(3,1,2),plot(t,v,'b'),xlabel('t/s'),ylabel('v/(m/s)');hold on;plot(t_array,v_array,'*','color','r'),grid on;
subplot(3,1,3),plot(t,a,'g'),xlabel('t/s'),ylabel('a/(m/s^2)');hold on;
% 指定文件夹保存图片
filepath=pwd; %保存当前工作目录
cd('C:UsersAdministratorDesktoppic') %把当前工作目录切换到图片存储文件夹
print(gcf,'-djpeg','C:UsersAdministratorDesktoppicsan.jpeg'); %将图片保存为jpg格式,
cd(filepath) %切回原工作目录
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208907 -
机械臂
+关注
关注
12文章
527浏览量
24757 -
六自由度机器人
+关注
关注
0文章
2浏览量
720
发布评论请先 登录
相关推荐
6自由度机械臂点到点5次多项式插值轨迹规划
([0 0.515 0pi/20]);L5=Link([pi00pi/20]);L6=Link([0 0.08000]);[q ,qd, qdd]=jtraj(q1,q2,50); %五次多项式轨迹,得到关节角度,角速度,角加速度,50为采样点个数T=robot.fkin
发表于 03-13 10:09
采用LabVIEW实现四自由度机械臂运动控制系统设计
应用领域:控制设计挑战: 短期内实现4自由度机械臂(3台交流伺服电机、1台微型直流电机)的 变参数同步运动控制,为钢丝传动机构的控制提供应用解决方案。应用方案: 方案采用NI公司
发表于 05-06 09:26

分享最好的机械臂是7个自由度的原因
现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个

为什么最好的机械臂是7个自由度而不是6个自由度
现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
使用SimMechanics实现六自由度的机械臂仿真研究
,仿真功能强大,可以在模型中通过改变结构,优化系统参数,在仿真环境中分析结果。利用 SimMechanics 的上述优点,以工业六自由度机械臂 ER10 为研究对象,将 SolidWo
发表于 11-12 08:00
•1次下载





 工商网监
工商网监
评论