 如何将消息导入Unity
如何将消息导入Unity
自定义msg
将消息导入Unity的步骤如下所示:
1.Unity的菜单“Robotics→Generate ROS Messages…”选择。
2.在“ROS message path”中选择“catkin_ws/src”。
然后就可以看到path下的msg都会显示在Unity下面
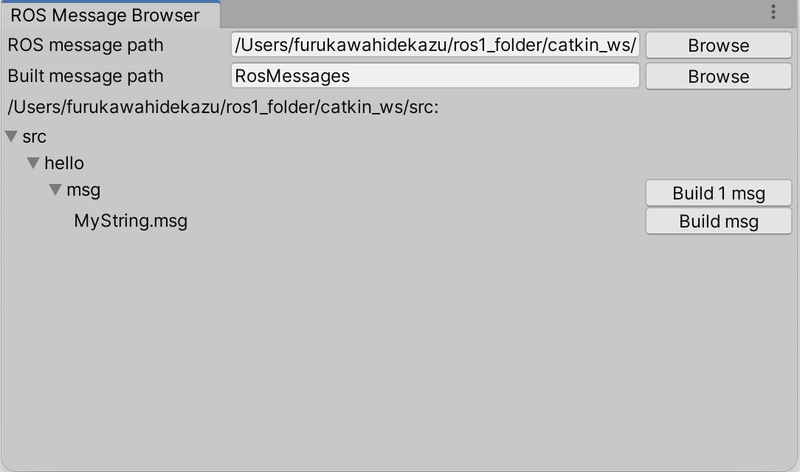
然后点击“MyString.msg”中的“Build msg”。这样“MyString.msg”将被转换成c#脚本“MyStringMsg”,并在Project窗口中输出“RosMessages”。

Topic话题
这一小节我们主要来说Topic的发布和订阅,首先我们来看一下发布者的Unity编程。
1.在Hierarchy窗口的“+→Create Empty”中创建空GameObject,命名为“Publisher”。
2.在“Publisher”中追加新脚本“ChatterPublisher”,编辑如下
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
using MyStringMsg = RosMessageTypes.Hello.MyStringMsg;
public class ChatterPublisher : MonoBehaviour
{
private ROSConnection ros;
// 初始化时被调用
void Start()
{
// 向ROS连接注册Topic话题
ros = ROSConnection.instance;
ros.RegisterPublisher< MyStringMsg >("chatter");
}
// 每帧更新
void FixedUpdate()
{
// 发送msg信息
MyStringMsg msg = new MyStringMsg("Hello Unity!");
ros.Send("chatter", msg);
}
}
而接收者和发布者类似,都在Hierarchy窗口的“+→Create Empty”中创建空GameObject,命名为“Subscriber”。
在“Subscriber”中添加新的脚本“ChatterSubscriber”,编辑如下。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
using MyStringMsg = RosMessageTypes.Hello.MyStringMsg;
public class ChatterSubscriber : MonoBehaviour{
void Start(){
// 向ROS连接注册Subscribe
ROSConnection.instance.Subscribe< MyStringMsg >("chatter", Callback);
}
void Callback(MyStringMsg msg){
Debug.Log(msg.data);
}
}
同时我们可以在ROS当中订阅这些信息,运行
roscore
rosparam set ROS_IP 127.0.0.1
rosparam set ROS_TCP_PORT 10000
rosrun ros_tcp_endpoint default_server_endpoint.py
# roslauch ros_tcp_endpoint endpoint.launch tcp_ip:=127.0.0.1 tcp_port:=10000 # 将127.0.0.1
然后写一个listener.py的订阅器。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编程
+关注
关注
88文章
3614浏览量
93686 -
ROS
+关注
关注
1文章
278浏览量
17001 -
Unity
+关注
关注
1文章
127浏览量
21806
发布评论请先 登录
相关推荐
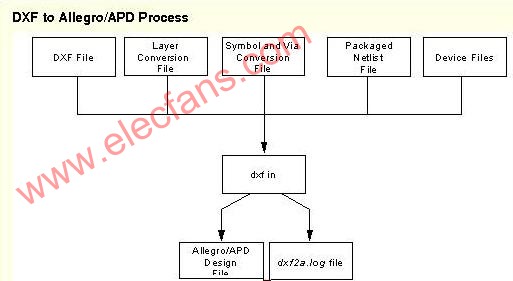
如何将dxf导入Allegro
如何将dxf导入Allegro
Allegro可以导入AutoCAD产生的DXF文件(支持DXF R10-R14版本)。同时Allegro也可以将设计文
发表于 03-21 18:21
•1.2w次阅读
如何将pcan view 中读到的数据导入labview中?
如何将pcan view 中读到的数据导入labview中?是不是因为labview中没有装DAQ_MX呀?求大神给予帮助
发表于 11-21 16:06
如何将示例项目导入MCUXpresso IDE?
使用 RT1050 板,并有这个例子。我阅读了 RT1020 板支持 mc_pmsm 与板 FRDM-MC-LVPMSM 组合的文档。我正在寻找如何将示例项目导入 MCUXpresso IDE,有人可以帮助我吗?
发表于 03-16 08:15
如何将ECC密钥导入HSE FW?
我目前正在尝试将 ECC 公钥导入 HSE FW。
OpenSSL 已生成扩展名为“.pem”的私钥和公钥。
所以我的问题是,如何将这个 pem 文件转换成可用于密钥导入的文件。
发表于 05-04 06:13
如何将Unity着色器移植到通用渲染管道
介绍如何将为内置管道编写的Unity着色器移植到URP。本指南还介绍了如何将自定义着色器移植到URP。这是因为这些着色器无法自动移植到URP。在指南的末尾,您将:•熟悉URP•了解如何将
发表于 08-02 13:39
如何将Arm Neon C#内部函数与Unity Burst编译器一起使用
本指南解释了如何将Arm Neon C#内部函数与Unity Burst编译器一起使用,以提高Unity Android应用程序的性能。
在本指南结束时,您将了解到:
•单指令多数据(SIMD)指令
发表于 08-10 07:11
CAD免费教程:如何将Excel数据快速导入CAD图纸
在平时的设计工作中,为了图纸内容的丰富性,通常会在里面添加一些元素,使得数据更加的完善,那我们想在CAD图纸中添加一份Excel数据表,徒手绘制那就肯定是太过于麻烦了,那怎么才能省时省事呢?这个时候就用到了技巧的问题了,一步教你如何将Excel数据表快速导入CAD图纸。
发表于 09-05 08:00
•9次下载
如何将Klayout Cell动态导入Lumerical Multiphysics
在本例中,演示了如何将KLayout Library Cell动态导入 Lumerical 以执行设计扫描和表征。该功能支持动态导入到Lumerical FDTD、MODE以及Multiphysics的所有工具,包括CHARGE






 工商网监
工商网监
评论