 基于CW32的遥控循迹小车
基于CW32的遥控循迹小车

例程资料链接如下(群文件也可下载):
BD网盘链接:
https://pan.baidu.com/s/187ePq84u2QjE1bsVPM6i3g?pwd=9jvv
提取码:9jvv
一、实验简介
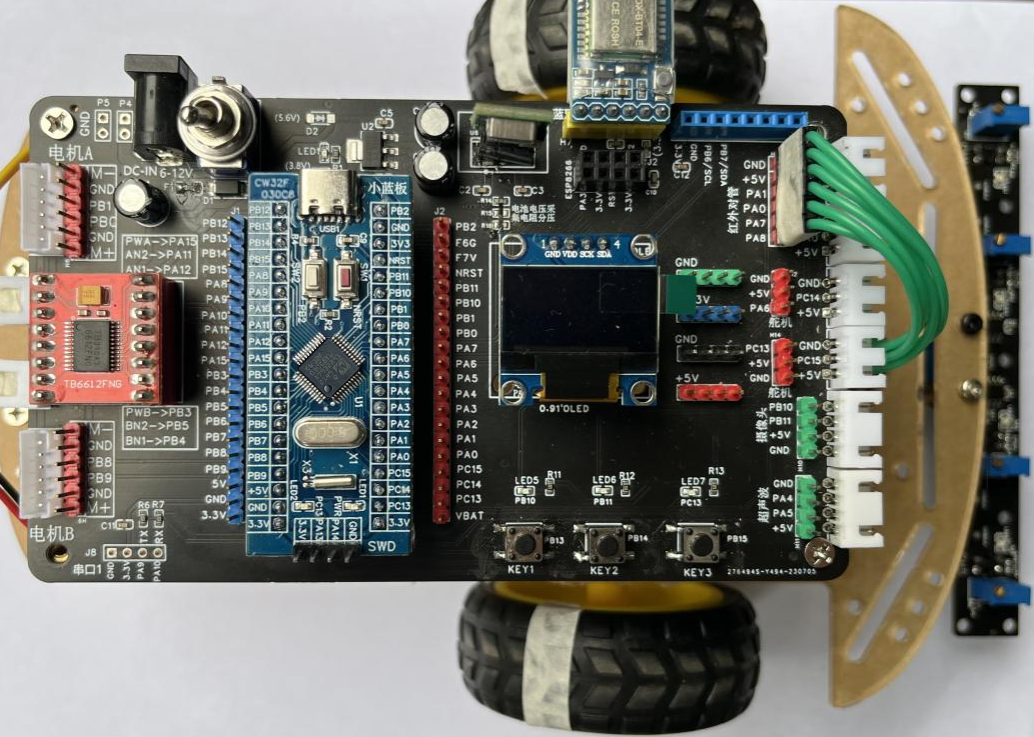
本实验是使用CW32单片机制作一个入门的遥控循迹小车。遥控采用蓝牙配合手机APP进行遥控。循迹使用一个5路的循迹模块。使用OLED模块进行显示当前小车状态。
二、实验器材
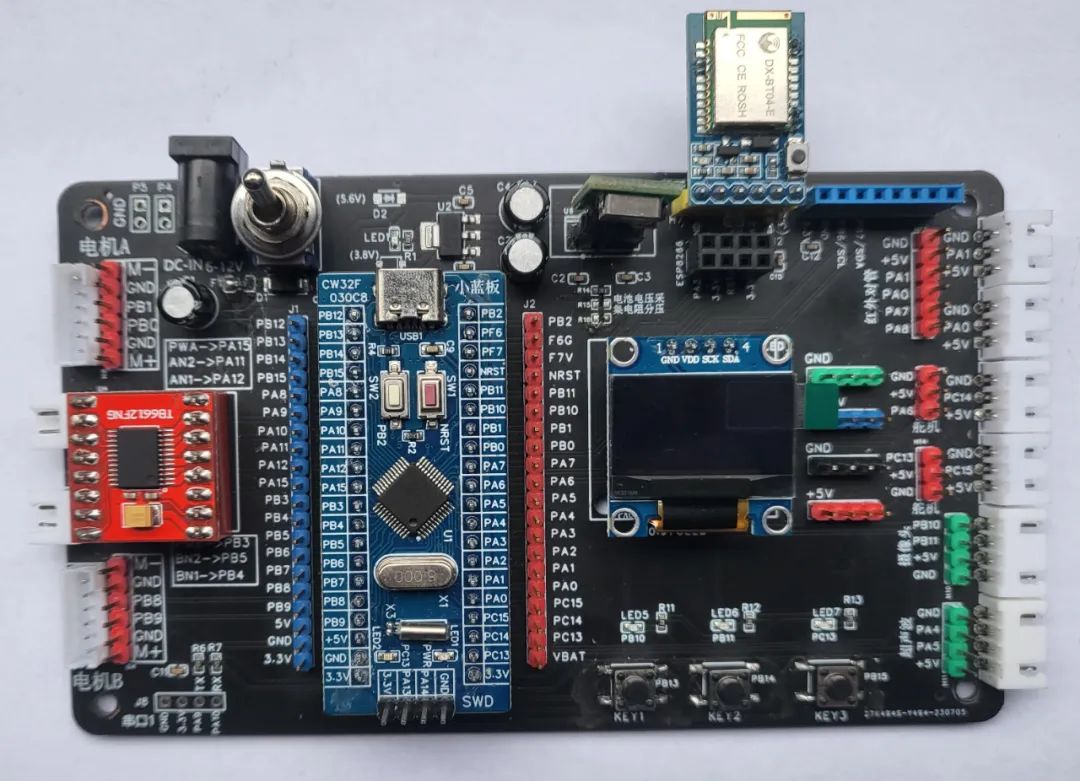
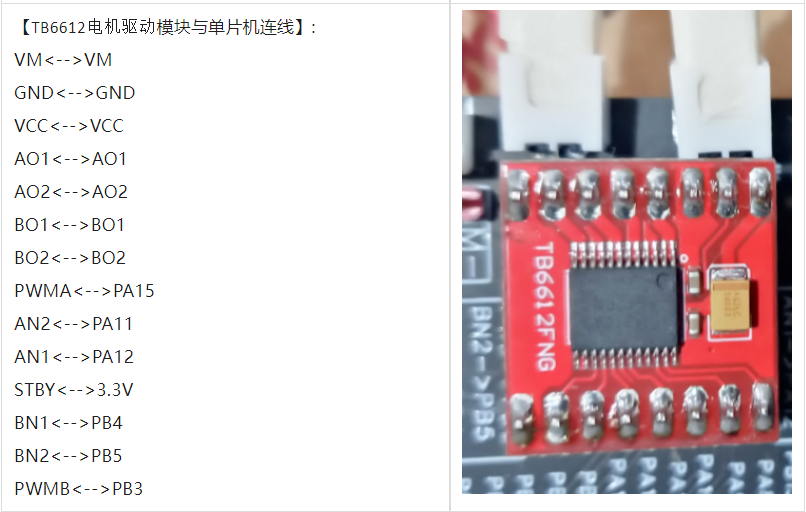
本实验使用到了CW32F030C8小蓝板、智能小车底板、电机驱动模块、OLED模块、DX-BT04-E蓝牙模块、Wch-Link下载调试器、Keil5开发环境。
二、接线图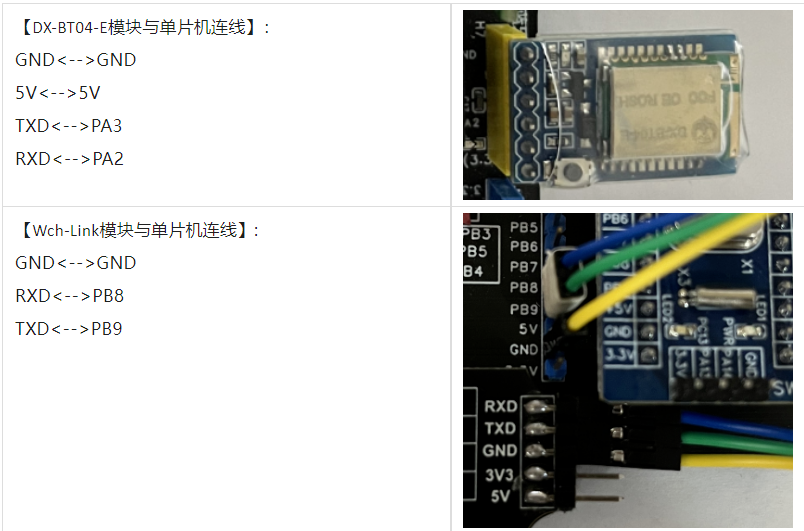

实验完整接线图:
四、用到的外设
1.串口2:
串口2用于蓝牙模块,使手机和单片机通过蓝牙模块进行串口透传,从 而进行点对点通信。
2.高级定时器ATIM:
初始化高级定时器CH1B和CH2B进行PWM波输出,从而达到电机调速目的。
3.基本定时器BTIM1:
初始化基本定时器1,在基本定时器中断服务函数中对循迹模块进行扫描。将扫描的结果保存,以便在循迹模式中使用。
4.IIC1:
IIC1用于外挂OLED显示模块。
五、核心代码
// 基本定时器中断回调函数
// 在回调函数中对循迹模块进行扫描,将循迹模块的状态保存进sensor_data中
void BTIM1_IRQHandler(void)
{
if (BTIM_GetITStatus(CW_BTIM1, BTIM_IT_OV)) // 判断是否是通道1中断
{
BTIM_ClearITPendingBit(CW_BTIM1, BTIM_IT_OV); // 清除中断标志位
char t = 0x00; // 设置零时变量保存灰度传感器的值
// 保存灰度传感器的值
// 采用或运算,检测到黑线将相应的位设置为1
if (!GPIO_ReadPin(TRACKING_GPIOA, TRACKING_1))
{
t |= 0x08; // 00001000 左边数第一个
}
if (!GPIO_ReadPin(TRACKING_GPIOA, TRACKING_2))
{
t |= 0x04; // 00000100 左边数第二个
}
if (!GPIO_ReadPin(TRACKING_GPIOA, TRACKING_3))
{
t |= 0x02; // 00000010 左边数以三个
}
if (!GPIO_ReadPin(TRACKING_GPIOA, TRACKING_4))
{
t |= 0x01; // 00000001 左边数第4个
}
if (!GPIO_ReadPin(TRACKING_GPIOC, TRACKING_5))
{
t |= 0x10; // 00010000 左边数第5个
}
sensor_data = t; // 将灰度传感器的值赋值给sensor_data
}
}
// 串口1中断处理函数
void UART1_IRQHandler(void)
{
unsigned char TxRxBuffer;
if (USART_GetITStatus(CW_UART1, USART_IT_RC) != RESET)
{
USART_ClearITPendingBit(CW_UART1, USART_IT_RC); // 清除中断标志位
TxRxBuffer = USART_ReceiveData_8bit(CW_UART1); // 将接收到的数据放入TxRxBuffer
USART_RX_BUF[rxIndex] = TxRxBuffer; // 将接收到的数据放入缓冲区
if (rxIndex < USART_REC_LEN - 1) // 做数据长度的限制,留一个字节用于结束字符或者溢出检测
{
// 接收到的字符包含 n 或者 r 结束接收
if (USART_RX_BUF[rxIndex - 1] == 'n' || USART_RX_BUF[rxIndex - 1] == 'r')
{
USART_RX_BUF[rxIndex] = '�'; // 在最后一个字节加上空字符,表示字符串结束
}
else
{
rxIndex++;
}
}
rxIndex = 0; // 清除数据标志
flag = 1; // 清除
}
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
遥控
+关注
关注
11文章
291浏览量
59438 -
循迹小车
+关注
关注
42文章
65浏览量
69508 -
CW32
+关注
关注
1文章
324浏览量
1958
发布评论请先 登录
相关推荐
热点推荐
基于CW32的蓝牙无刷遥控车案列
产品应用案例简介:
聚焦CW32,着手PT2432,驱动无刷电机,集成CH571F,赋能蓝牙交互,串联智能终端,形成组合拳,对标外星科技。
开源协议: MIT
一、外观展示
二、电路展示
发表于 01-15 08:22
CW32单片机如何让生活更便捷
这是一种全新的生活方式,它通过接收并处理传感器的数据,以控制智能马桶的所有功能。感谢CW32单片机,我们可以在日常生活中无缝地融入这种新的科技。
决定我们如何生活的,已经不再只是我们的选择,更是我们
发表于 12-11 06:11
CW32时钟运行中失效检测的流程是什么?CW32时钟运行中失效检测注意事项有哪些呢?
CW32时钟运行中失效检测的流程是什么?CW32时钟运行中失效检测注意事项有哪些?
发表于 12-10 07:22
关于CW32 互补PWM 程序调试的疑问求解
在调试CW32 输出互补PWM 的程序时,发现在线调试时波形输出正常,但是当把程序在下到CW32 自行运行时,波形输出不正常,这是什么原因导致的呢?
发表于 12-08 07:02
基于芯源CW32 MCU的LED闪烁示例及代码分析
最近我在项目中使用了芯源的CW32 MCU,这是一款非常适合物联网和低功耗应用的微控制器。在初步学习和使用中,我做了一个简单的LED闪烁实验,通过这篇帖子给大家分享一下代码及相关的配置步骤。
硬件
发表于 12-04 06:52
CW32 MCU温度监测应用
最近,我在项目中使用CW32 MCU,来实现一个简单的温度监测系统。CW32的灵活性和性能让我在这个应用中得心应手。以下是我的实现过程和代码示例。
应用简介本项目通过连接一个温度传感器LM35来实时
发表于 12-03 08:03
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
一、评测前言
非常感谢CW32生态社区,开源分享了许多比较好玩、优质的项目。这次活动都尾声了还能有幸申请购买到 四足机器人+小车-智能小车(套件数量不多)的评测套件,多谢C32生态社区的大力支持
发表于 11-24 23:44
CW32 MCU用什么IDE开发?
推荐使用IAR Embedded Workbench for ARM、Keil μVision for ARM等IDE开发CW32 MCU应用,其中新版本IAR EWARM直接支持CW32 MCU,Keil MDK-ARM则需要安装CW
发表于 11-12 07:52
CW32 MCU有哪些系列?
目前CW32 MCU有通用高性能MCU、安全低功耗MCU、无线射频MCU等3个系列。其中射频MCU集成了无线收发器,主要包括CW32R031(2.4GHz BLE-Lite)系列和CW32W031(Sub-1G)系列。
发表于 11-12 07:34



评论