 ROS主控与STM32的硬件连接和软件设置
ROS主控与STM32的硬件连接和软件设置
硬件连接
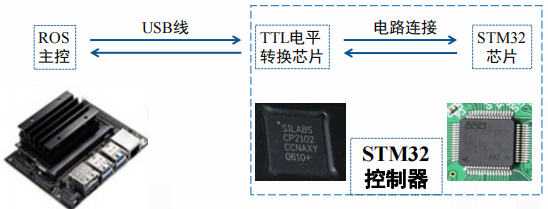
ROS主控通过usb线连接到一个TTL电平转换芯片,再由这个电平转换芯片连接STM32芯片
电平转换芯片可以通过PCB设计在STM32芯片的电路板上,也可以使用一个USB转TTL的模块。
为什么两个控制器之间需要电平转换芯片?
因为两个控制器之间通信层次逻辑是不同的,所有需要电平转换芯片。相当于两个主控是两种不同语言的人,电平转换芯片相当于一个翻译。
电平转换芯片可以是:
- cp2102
- ch340
- PL2303
- FT232RL
软件设置
硬件连接上之后,需要一个软件设置
需要软件设置原因:
ROS主控可能接入多个USB设备,或者接入两个型号一样的电平转换芯片。
不同USB设备占用的ROS主控的端口号在每次上电时可能会不一致,这样需要手动修改代码中的配置参数,比较麻烦,也无法做到自启动。
如果存在多个USB设备,但是每种USB设备的电平转换芯片不一样,那么我们可以根据芯片名称来知道端口号,但是如果有两个芯片一样的电平转换芯片,则无法区分,这时候想做自启动那么必须要进行下面步骤的软件设置
软件设置分为两步:
- 第一步是更改电平转换芯片的serial,
- 第二步是创建设备别名
更新电平转换芯片的serial
首先在win环境下安装更改芯片serial的软件
CP21xx
Customization Utility.exe
这个软件在网上下载就可以
打开这个软件,然后将芯片连接电脑的USB

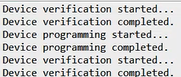
然后将圆圈位置改为0002,然后点击Program Device。
点完之后要等下,在Status Logging窗口中出现下面信息,才说明修改好了
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
112文章
16487浏览量
179800 -
STM32
+关注
关注
2274文章
10929浏览量
358012 -
智能车
+关注
关注
21文章
405浏览量
77078 -
ROS
+关注
关注
1文章
281浏览量
17140
发布评论请先 登录
相关推荐
【ROS RIKIBOT基础--使用系列 第一章节】ROS机器人硬件系统 精选资料分享
【ROS RIKIBOT基础–使用系列】ROS机器人硬件介绍1.RIKIBOT机器人硬件介绍1.1硬件框架
发表于 07-30 06:59
ROS与STM32是如何进行通信的
ROS与STM32通信2020.8.1主要内容制作ROS包,将控制命令传给STM32,并将接收到的数据作为话题进行发布STM32接收数据并将
发表于 08-11 07:25
stm32cubemx的ST-link v2硬件连接与软件设置如何去实现呢
怎样去搭建一种stm32cubemx硬件底层+软件设置开发环境呢?stm32cubemx的ST-link v2
发表于 02-17 07:15
基于FreeRTOS的micro(微型)ROS
开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。ROS遵守BSD开源许可协议。 ROS

ros智能小车硬件介绍
ROS控制端说明目前ROS小车控制主要由树莓派3B+/树莓派4B+作为主控,由于树莓派管脚资源有限,所以驱动多路电机和编码器采集速度的任务通常会交给驱动板处理,小车电机驱动目前有STM32
发表于 12-07 14:36
•16次下载

STM32 SPI 软件NSS和硬件NSS解读
[导读]SSM可以控制内部NSS引脚与SSI(一个寄存器,软件模式)相连,还是与NSS外部引脚(真正的STM32引脚,硬件模式)相连。真正作用的是内部NSS引脚(内部NSS引脚才真正连接
发表于 12-22 19:12
•14次下载
ROS与STM32通信
ROS与STM32通信2020.8.1主要内容制作ROS包,将控制命令传给STM32,并将接收到的数据作为话题进行发布STM32接收数据并将
发表于 12-24 19:00
•12次下载
ROS小车STM32底层控制代码
2.6 ROS小车STM32底层控制代码经过之前几篇文章,我相信大家一定对下面这些模块都已经有些了解了。今天,我们将编写ROS小车STM32单片机底层控制的最后一篇文章。我们将一起按照
发表于 01-14 12:54
•16次下载

ROS主控读取stm32发送的数据
ROS主控读取stm32发送的数据 之后便可以通过 Stm32_Serial .read (Receive_Data_Pr,sizeof(Receive_Data_Pr)); read





 工商网监
工商网监
评论