 MIMO雷达天线阵列设计
MIMO雷达天线阵列设计

一部带有一个发射机和一个接收机的雷达可以根据发射电磁波的往返时间来测量目标的距离,但不能测量目标的角度。一个简单的获取角度信息的方法是使用具有窄波束的天线进行机械旋转。但为了实现窄波束,需要一个大的天线,旋转大天线需要很大的空间,并且无法同时成像整个视场。
除了旋转单个天线,还可以采用相控阵雷达,利用多个天线形成雷达图像,无需物理旋转。MIMO雷达则是带有多个发射和接收天线的相控阵雷达。使用的天线越多,雷达的角度分辨率就越好。
MIMO雷达天线阵列设计基础
要知道目标的角度需要多个天线,这些天线位于略微不同的位置,因此在不同的时间接收信号。根据雷达回波到达每个天线的时间差,可以解出目标的角度。根据实际情况,与其使用需要极好时间分辨率的绝对时间差,不如使用接收到的信号的相位。
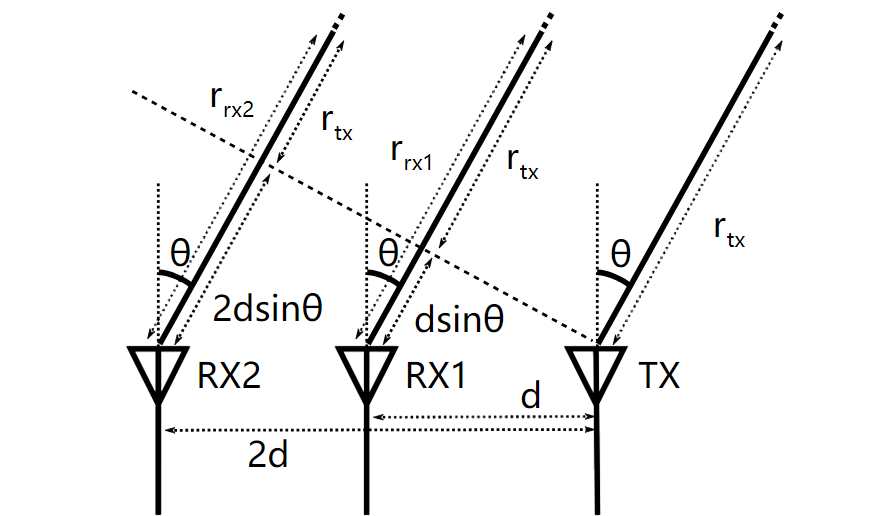
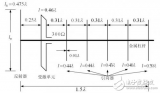
假设目标非常远,每个天线到目标的角度可以假定为相同,那么雷达波形到每个天线的距离如图1所示意。为了简化,另外假设天线阵元到目标的距离差小于雷达的距离分辨率。
雷达波形所经历的距离是从TX天线到目标的距离加上从目标返回到RX天线的距离:
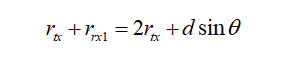
由于多个接收天线与发射机之间的距离不同,雷达波形的行走距离稍有不同,这便可以用来求解目标的角度。
在RX天线处接收到的来自一个目标的信号形式为:
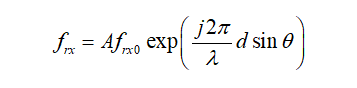
A是接收信号的幅度,frx0是在发射天线处接收到的回波。指数项是相移,它取决于到目标的距离r和辐射信号的波长λ=c/f。复数用于使分析在数学上更简单,实际测量的信号是实值的,因此只有表达式的实部会被测量。
对于一个目标,两个接收天线在不同的距离,目标的角度可以通过比较在两个接收天线处接收到的信号的相位差来确定。在距离d和2d的两个天线处接收到的信号的相位差是exp(2πjdsinθ/λ),目标的角度可以从表达式中解出。为了有一个唯一的解,距离d需要小于λ/2,否则由于sin的周期性,可能在两个或更多的角度获得相同的相位。
当有多个目标时,情况会变得复杂。不同目标的反射信号在接收机上求和,只能测量到求和后的信号。对于一个目标,所有天线的信号幅度都是一样的,但对于多个目标,则不是这样。
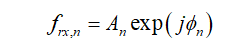
雷达波形frx0从接收机信号中解调出来后,每个接收机的输出形式是:
匹配滤波是确定每个角度是否有目标的最优线性滤波器。在这种情况下,匹配滤波器是从特定角度的单个目标观察到的信号:

目标分布可以计算为:

设置frx,n=1,可以得到零角度的单个目标的目标响应。
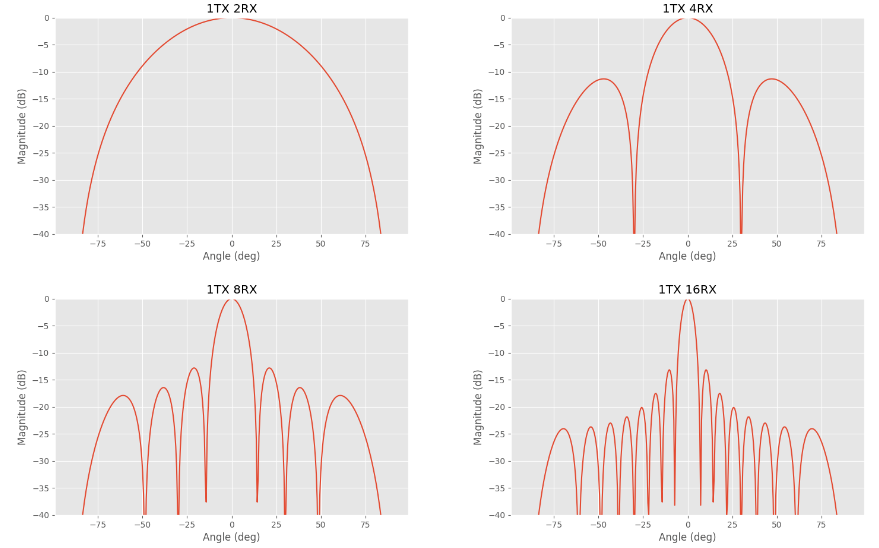
下图显示了具有单个发射机和不同数量接收机的阵列的目标响应。需要很多天线才能得到一个不错的角度分辨率。即使有16个接收机,-3 dB的角度分辨率也只有6度。旁瓣可以通过加权调整。如果没有权重,第一旁瓣位于-13 dB左右。
审核编辑:汤梓红
-
接收机
+关注
关注
9文章
1248浏览量
56464 -
发射机
+关注
关注
7文章
531浏览量
49347 -
MIMO雷达
+关注
关注
1文章
20浏览量
9722 -
雷达天线
+关注
关注
1文章
32浏览量
15783 -
天线阵列
+关注
关注
0文章
27浏览量
7901
原文标题:MIMO雷达天线阵列设计基础(1)
文章出处:【微信号:雷达通信电子战,微信公众号:雷达通信电子战】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
5G大规模MIMO天线阵列3D OTA测试
MIMO雷达简介
射频仿真系统的天线阵列怎么校准?
怎么测量天线阵列系统的插入损耗和插入相移变化量?
汽车雷达:阵列天线设计步骤
如何使用HFSS设计5G天线阵列?
超宽带时域天线阵列延时控制扫描实验
P波段瞬态极化雷达收发天线阵列设计解析
采用多方向天线阵列技术实现微带阵列天线的设计
后摩尔时代,从有源相控阵天线走向天线阵列微系统



评论