 变频伺服驱动器电源板计算和测试报告
变频伺服驱动器电源板计算和测试报告
1)欠压保护和开机软启动
三相220V交流电压经过整流以后得到脉动直流电压,如果此直流电压直接对1000uF电容充电势必因过大的浪涌电流使电容损坏,,因此启动时必须限制电流,即小电流对电容进行充电,这样直流母线电压就会逐渐上升,当其升高到阀值电压时,继电器吸合
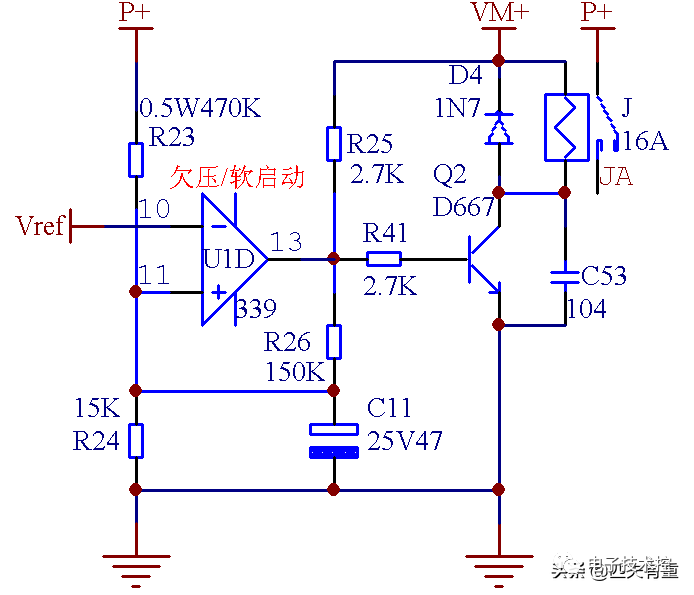
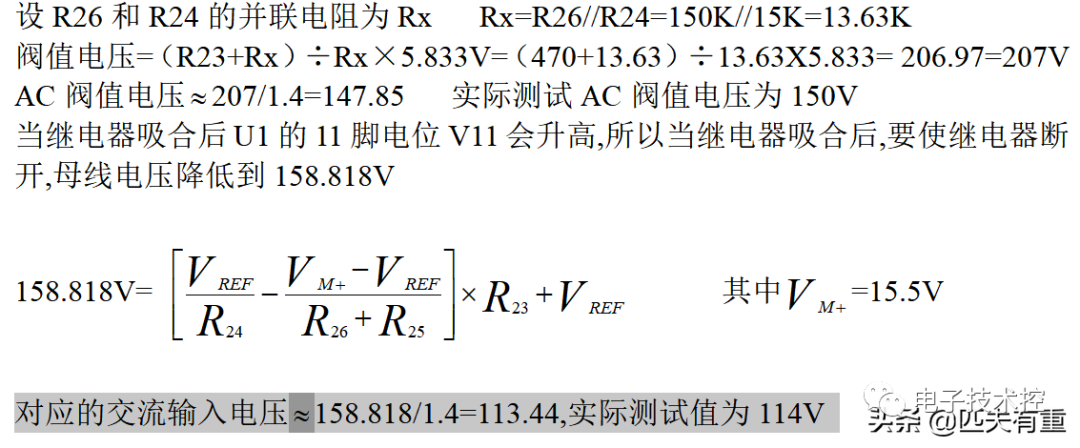
设R26和R24的并联电阻为Rx Rx=R26//R24=150K//15K=13.63K
阀值电压=(R23+Rx)÷Rx×5.833V=(470+13.63)÷13.63X5.833= 206.97=207V
AC阀值电压207/1.4=147.85 实际测试AC阀值电压为150V
当继电器吸合后U1的11脚电位V11会升高,所以当继电器吸合后,要使继电器断开,母线电压降低到158.818V,此时对应的交流输入电压为(158.818/1.4)113.44,实际测试值为114V
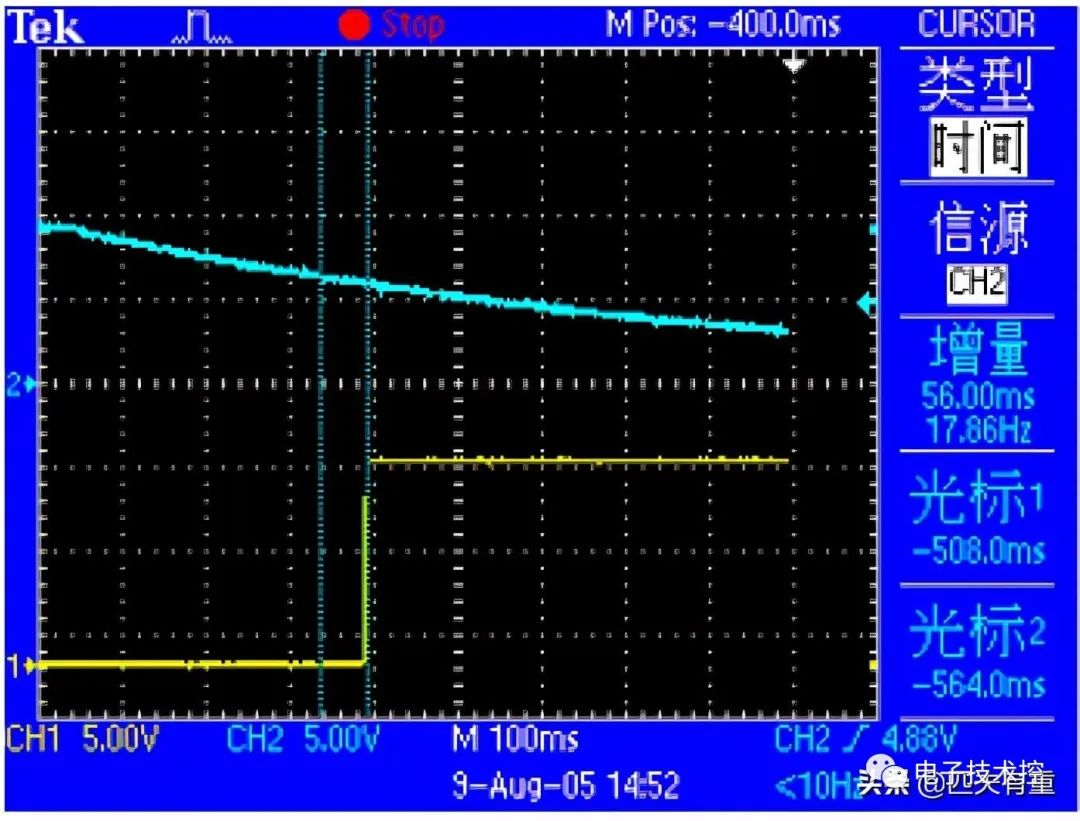
上图中的蓝色线表示直流母线经分压后作用在U1的11脚的电压,黄色线表示欠压报警信号,从上图可以读出当直流母线低于阀值电压时到本电路送出欠压报警信号之间的延时时间约为56Ms
2过压保护和制动电路
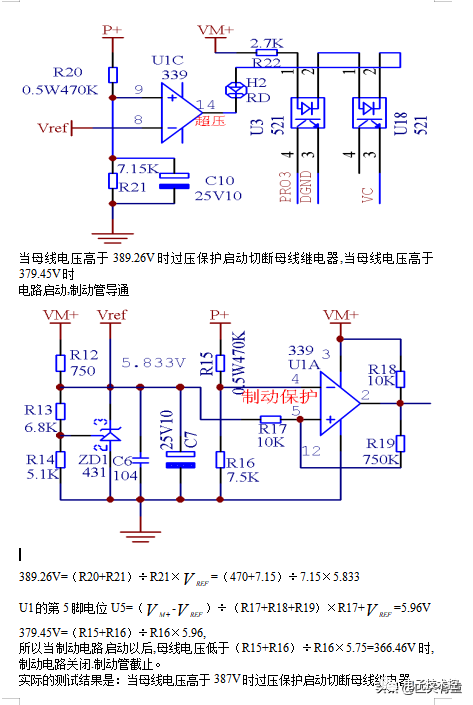
当母线电压高于389.26V时过压保护启动切断母线继电器,当母线电压高于379.45V时
电路启动,制动管导通
389.26V=(R20+R21)÷R21×=(470+7.15)÷7.15×5.833
U1的第5脚电位U5=(-)÷(R17+R18+R19)×R17+=5.96V
379.45V=(R15+R16)÷R16×5.96,
所以当制动电路启动以后,母线电压低于(R15+R16)÷R16×5.75=366.46V时,制动电路关闭.制动管截止。
实际的测试结果是:当母线电压高于387V时过压保护启动切断母线继电器,
当母线电压高于378V时制动电路启动,制动管导通,,母线电压低于380V时制动电路关闭.制动管截止。
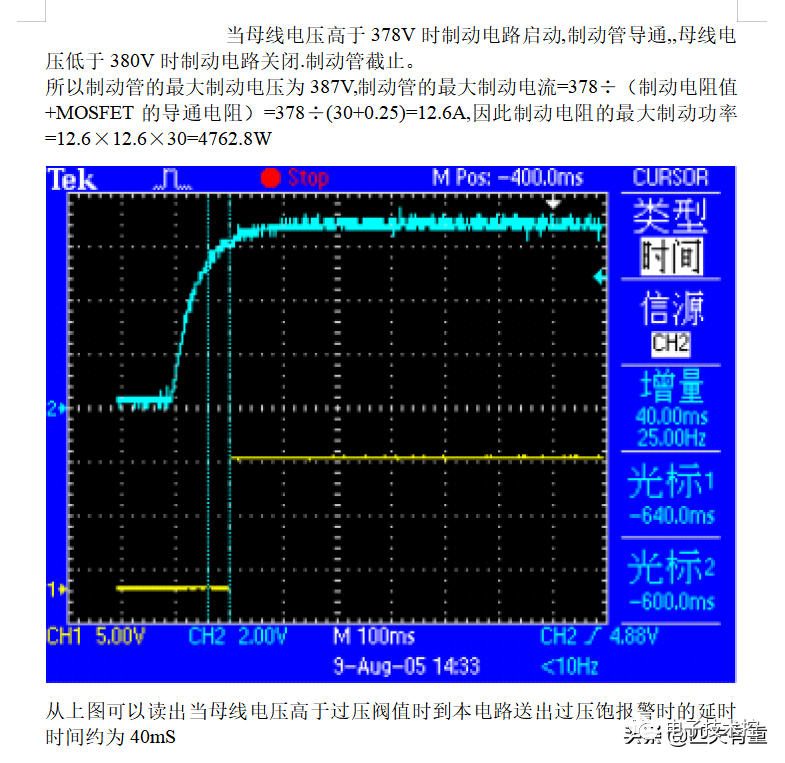
所以制动管的最大制动电压为387V,制动管的最大制动电流=378÷(制动电阻值+MOSFET的导通电阻)=378÷(30+0.25)=12.6A,因此制动电阻的最大制动功率=12.6×12.6×30=4762.8W
从上图可以读出当母线电压高于过压阀值时到本电路送出过压饱报警时的延时时间约为40mS
3 定时器电路部分
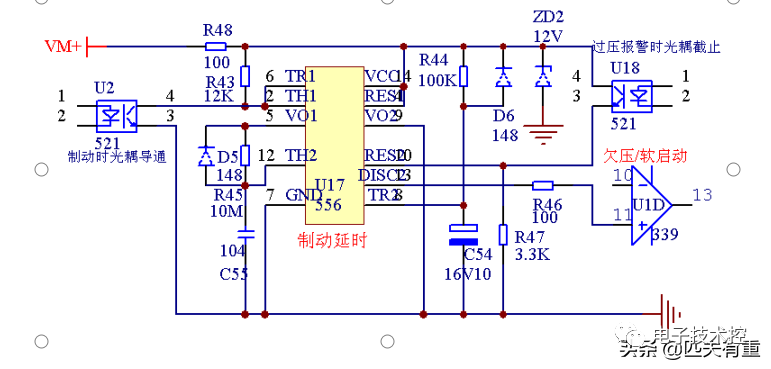
母线电压的升高有两种原因:1)电动机降速;2)市电输入升高。
尤其是市电输入升高使母线电压介于制动电压阀值和过压报警阀值之间时制动管流过的电流维持在12A左右,所以必须限制制动时间,以免损坏制动管和制动电阻。
当制动管处于制动状态时556的2脚(即TH1端)变为低电平,所以VO1变为高电平(即VCC)并通过R45向C55充电,所以TH2的电位将逐渐升高,当TH2的电位升高到VCC时,556内部放电管导通,相当于556的13脚(DISC2端)直接接地所以强行将U1的11脚电位拉得很低,所以欠压/软启动电路起作用,将主电路继电器断开,直流母线的电压将迅速下降,当其低于366.46V时,制动电路退出制动状态,制动延时时间的计算
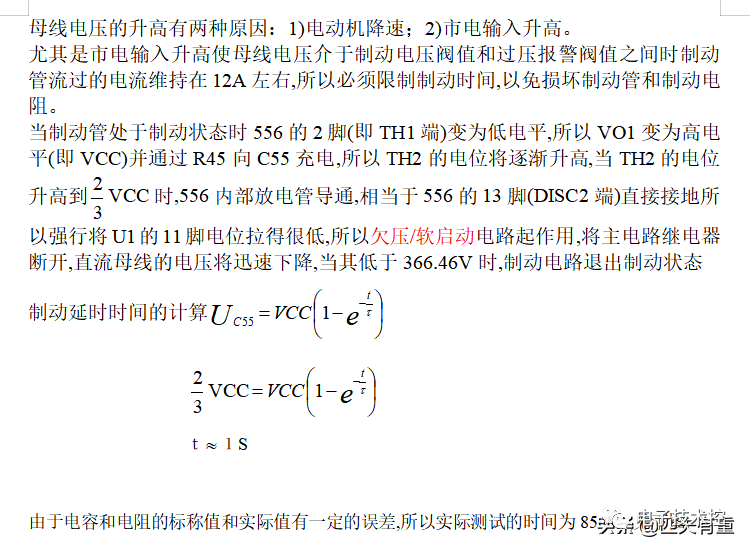
由于电容和电阻的标称值和实际值有一定的误差,所以实际测试的时间为850Ms,见下图

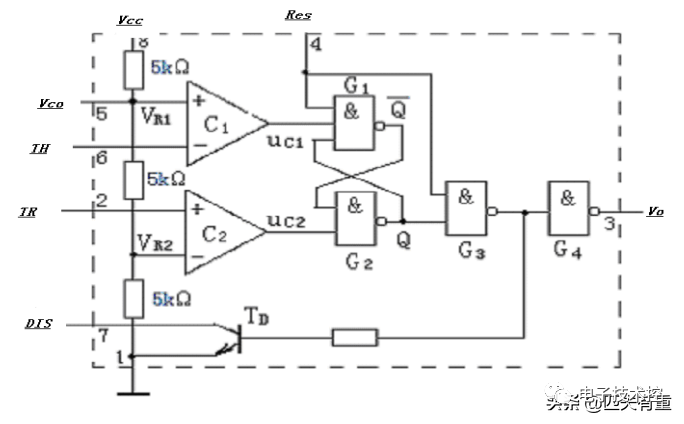
555时基芯片内部电路
| 触发(TR) | 阈值(TH) | 复位(RES) | DISC放电端 | 输出 |
| H | 导通 | L | ||
| H | 原状态 | |||
| H | 截止 | H | ||
| L | 导通 | L |
| DISC放电端 | 输出 | |||
| H | 导通 | L | ||
| H | 原状态 | |||
| H | 截止 | H | ||
| L | 导通 | L |
4 报警信号的定义
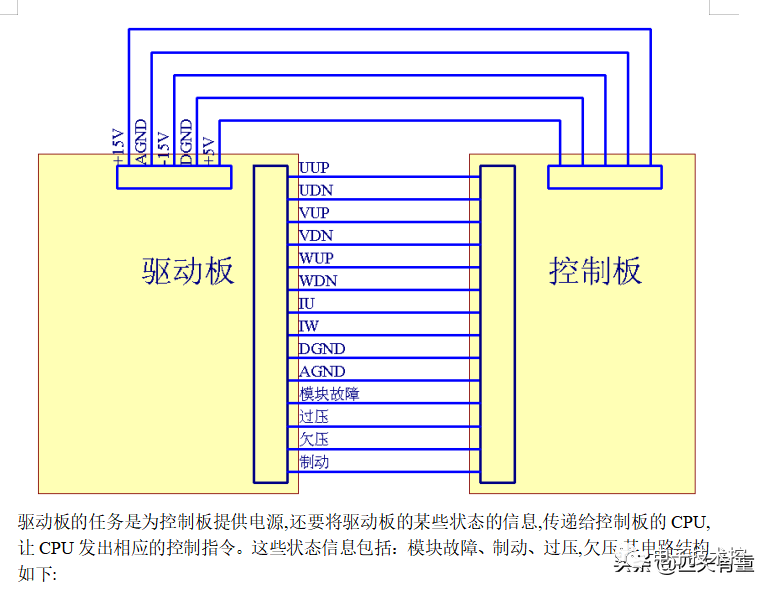
驱动板和控制板的连接见下图
驱动板的任务是为控制板提供电源,还要将驱动板的某些状态的信息,传递给控制板的CPU,让CPU发出相应的控制指令。这些状态信息包括:模块故障、制动、过压,欠压,其电路结构如下:
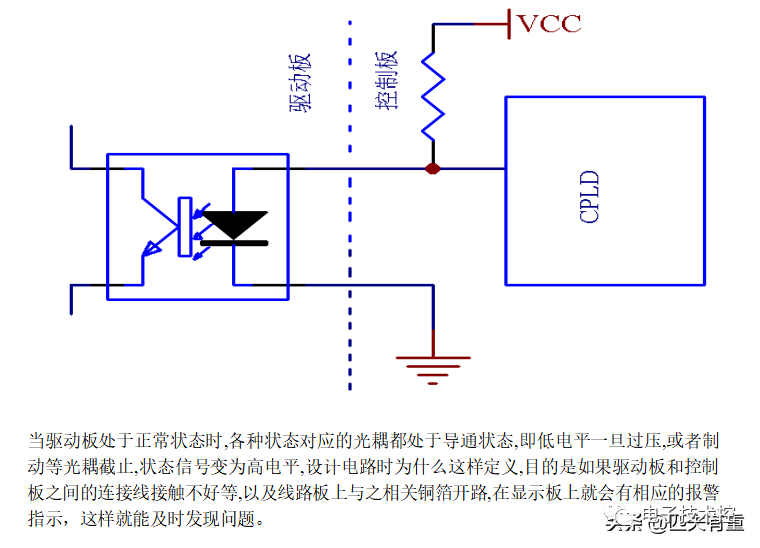
当驱动板处于正常状态时,各种状态对应的光耦都处于导通状态,即低电平一旦过压,或者制动等光耦截止,状态信号变为高电平,设计电路时为什么这样定义,目的是如果驱动板和控制板之间的连接线接触不好等,以及线路板上与之相关铜箔开路,在显示板上就会有相应的报警指示,这样就能及时发现问题。
5 开关电源电路
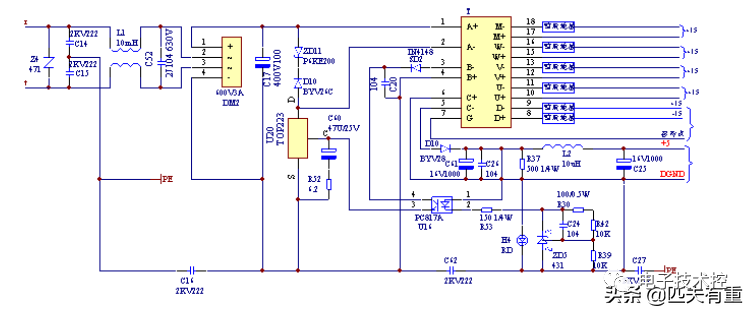
1、输入特性:
l 输入电压范围:85VAC —— 260VAC
l 输入频率范围:47Hz —— 63Hz
l 额定输入电压及频率:220VAC 50 Hz
2、输出特性
l 额定输出功率15W 效率不低于70%
| 组别 | 输出电压 | 输出电流 | 纹波P-P值 | 电压调整率 | 负载调整率 |
| 1 | +VCC(+5V) | 1.2A | <50mV | <1% | <1% |
| 2 | +V(+15V) | 200mA | <20mV | <1% | <1% |
| -V(-15V) | 200mA | <20mV | <1% | <1% | |
| 3 | +VUPI(+15V) | 50mA | <150mV | <5% | <10% |
| 4 | +VVPI(+15V) | 50mA | <150mV | <5% | <10% |
| 5 | +VWPI(+15V) | 50mA | <150mV | <5% | <10% |
| 6 | +VNI(+15V) | 50mA | <150mV | <5% | <10% |
测试条件:输入电压220V
l 最大输出功率15W 效率不低于70
审核编辑:汤梓红
-
继电器
+关注
关注
132文章
5334浏览量
148891 -
驱动器
+关注
关注
52文章
8236浏览量
146354 -
电源板
+关注
关注
27文章
93浏览量
24206 -
交流电压
+关注
关注
2文章
188浏览量
16904 -
伺服驱动器
+关注
关注
22文章
483浏览量
31574
原文标题:变频伺服驱动器电源板计算和测试报告
文章出处:【微信号:电子技术控,微信公众号:电子技术控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深圳FANUC发那科伺服驱动器回收,发那科电源板回收
如何分辨伺服驱动器和变频器

用于EiceDRIVER™隔离栅极驱动器的电源评估板

变频伺服驱动器电路分析





 工商网监
工商网监
评论