 PCL中基础下采样介绍
PCL中基础下采样介绍
基础下采样
1.1 点云随机下采样
点云下采样是对点云以一定的采样规则重新进行采样,目的是在保证点云整体几何特征不变的情况下,降低点云的密度,进而可以降低相关处理的数据量和算法复杂度。
随机下采样顾名思义,随机下采样就似乎在原始点云中随机采样一定点数的点。这种方法最终得到的点云数量也是固定的。
pcl::PointCloud< PointT >::Ptr cloud_sub(new pcl::PointCloud< PointT >); //随机下采样点云
pcl::RandomSample< PointT > rs; //创建滤波器对象
rs.setInputCloud(cloud); //设置待滤波点云
rs.setSample(20000); //设置下采样点云的点数
//rs.setSeed(1); //设置随机函数种子点
rs.filter(*cloud_sub); //执行下采样滤波,保存滤波结果于cloud_sub
1.2 体素下采样
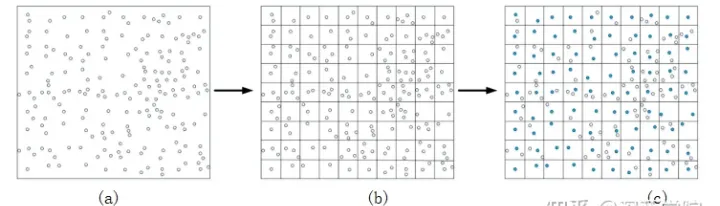
体素下采样的原理如图1所示,首先将点云空间进行网格化,也称体素化,即图1(b),网格化后的每一个格子称为体素,在这些划分为一个个极小的格子中包含一些点,然后对这些点取平均或加权平均得到一个点,以此来替代原来网格中所有的点,即图1(c)中蓝色的点。显然,网格选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
pcl::VoxelGrid< pcl::PointXYZ > sor; //创建体素网格采样处理对象
sor.setInputCloud(cloud); //设置输入点云
sor.setLeafSize(0.01f, 0.01f, 0.01f); //设置体素大小,单位:m
sor.filter(*cloud_filtered); //进行下采样
1.3 均匀采样
均匀采样的原理类似于体素化网格采样方法,同样是将点云空间进行划分,不过是以半径=r的球体,在当前球体所有点中选择距离球体中心最近的点替代所有点,注意,此时点的位置是不发生移动的。
球体半径选取越大则采样之后的点云越少,处理速度变快,但会对原先点云过度模糊,网格选取越小,则作用相反。
pcl::UniformSampling< pcl::PointXYZ > form; // 创建均匀采样对象
form.setInputCloud(cloud); //设置输入点云
form.setRadiusSearch(0.02f); //设置半径大小,单位:m
form.filter(*after_cloud); //执行滤波处理
1.4 增采样
增采样的特点是可极大的增加点云数据,但由于内插点的不确定性会导致最后输出的结果不一定准确。
//创建增采样对象
pcl::MovingLeastSquares< pcl::PointXYZ,pcl::PointXYZ > filter;
filter.setInputCloud(cloud); //设置输入点云
pcl::search::KdTree< pcl::PointXYZ >::Ptr kdtree; //定义搜索方法
filter.setSearchMethod(kdtree); //设置搜索方法
filter.setSearchRadius(0.03); //设置搜索邻域的半径为3cm
//Upsampling 采样的方法还有 DISTINCT_CLOUD, RANDOM_UNIFORM_DENSITY
filter.setUpsamplingMethod(pcl::MovingLeastSquares< pcl::PointXYZ, pcl::PointXYZ >::SAMPLE_LOCAL_PLANE); //对点云进行上采样
filter.setUpsamplingRadius(0.03); //设置采样半径大小,3cm
filter.setUpsamplingStepSize(0.02); //设置采样步长大小,2cm
filter.process(*after_cloud); //执行采样操作
1.5 滑动最小二乘法采样
滑动最小二乘法采样的原理是将点云进行了滑动最小二乘法的映射,使得输出的点云更加平滑。
pcl::PointCloud< pcl::PointNormal >::Ptr smoothedCloud(new pcl::PointCloud< pcl::PointNormal >); //定义法线
pcl::MovingLeastSquares< pcl::PointXYZ, pcl::PointNormal > filter;
pcl::search::KdTree< pcl::PointXYZ >::Ptr kdtree; //定义搜索方法
filter.setInputCloud(cloud); //设置输入点云
filter.setUpsamplingMethod(); //增加密度较小区域的密度对于holes的填补却无能为力,具体方法要结合参数使用
filter.setSearchRadius(10);// 用于拟合的K近邻半径。在这个半径里进行表面映射和曲面拟合。半径越小拟合后曲面的失真度越小,反之有可能出现过拟合的现象。
filter.setPolynomialFit(true); //对于法线的估计是有多项式还是仅仅依靠切线。true为加多项式;false不加,速度较快
filter.setPolynomialFit(3); // 拟合曲线的阶数
filter.setComputeNormals(true); // 是否存储点云的法向量,true 为存储,false 不存储
filter.setSearchMethod(kdtree); //设置搜索方法
filter.process(*smoothedCloud); //处理点云并输出
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
滤波器
+关注
关注
161文章
7834浏览量
178279 -
plc
+关注
关注
5012文章
13314浏览量
463816 -
采样
+关注
关注
1文章
121浏览量
25575
发布评论请先 登录
相关推荐
关于232的NCL,PCL的疑问
有没有大神接触过这种232通讯的仪表,上面有NCL RXD,NCL TXD;PCL RXD,PCL TXD。这种能用DB9的芯片去采集数据吗?我用DB9的RXD去接它的 NCL TXD,数据偶尔会有一位的偏移,请问该怎么正确的采集它的数据,拜谢
发表于 11-07 16:15
PCL点云库介绍及项目配置方式
关于PCL点云库,大家百度的时候可以找到很多相关的介绍,反正一堆专业性概念,相关的技术层面以及一些强大的应用叙述云云,不过关于这些小编实在不感冒,能先把这个工具好好用起来再说吧。关于PCL相关的论坛
发表于 07-02 07:44
PCL应用示例
作为PCL系列的一个简单的应用示例,该图是与通常的1轴工作台的机械系统连接的示例。按照从CPU接收的各动作数据中指定的方向运转电机,定位在工作台的行程内。原点调整时,减速(SD)传感器设为ON后减速
发表于 11-04 16:18
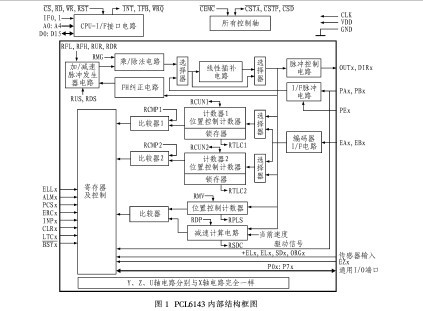
PCL6143运动控制器原理及应用
PCL6143运动控制器的原理及应用 可以用于设计开发相应的芯片电路。介绍了PCL6143 的功能结构、主要寄存器以及指令系统。设计了一款基于PC104总线的四轴运动控制卡, 介绍了如
发表于 09-26 08:14
PCL6143运动控制器的原理及应用
介绍了PCL6143的功能结构、主要寄存器以及指令系统。设计了一款基于PC104总线的四轴运动控制卡,介绍了如何编写运动控制卡的功能函数库。
发表于 12-13 17:16
•106次下载

PCL中最远点采样是什么
最远点采样(Farthest Point Sampling) 这里我们来单独看一下调用代码,这里可以看到PCL中支持直接调用farthest_sampling这个函数可以实现最远点采样
PCL中法线空间采样介绍
法线空间采样 NormalSpaceSampling即:法线空间采样,它在法向量空间内均匀随机抽样,使所选点之间的法线分布尽可能大,结果表现为地物特征变化大的地方剩余点较多,变化小的地方剩余点稀少
PCL泊松盘采样具体流程
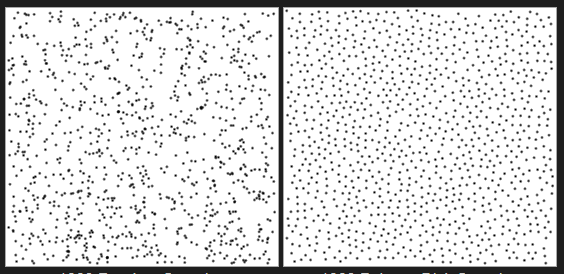
泊松盘采样 泊松盘采样(possion disk sampling)的特点是任何两个点的距离都不会隔得太近。 比如下图,左边是随机生成的点,右边是泊松盘采样生成的点。 具体流程如下: 1、设定好两个
PCL中非均匀体素采样介绍
非均匀体素采样 SamplingSurfaceNormal,将输入空间划分为网格,直到每个网格中最多包含N个点,并在每个网格中随机采样点。 使用每个网格的N个点计算法线。 在网格内采样





 工商网监
工商网监
评论