 S7-1200/1500气动机械手编程实例
S7-1200/1500气动机械手编程实例
程序说明
西门子S7-1200/1500PLC的气动机械手搬运硬件组成包括:工件到位光电开关、升降气缸、平移气缸、夹抓气缸和气缸磁性开关等。自动动作过程:工件到位光电开关亮→升降气缸降→夹抓抓取工件→升降气缸升→平移气缸到下料位→升降气缸降下→夹抓松开→升降气缸升→平移气缸到取料位等待下个工件。开头的硬件组态都是差不多一样,重复一遍,加深映像。
一、组态一个PLC设备
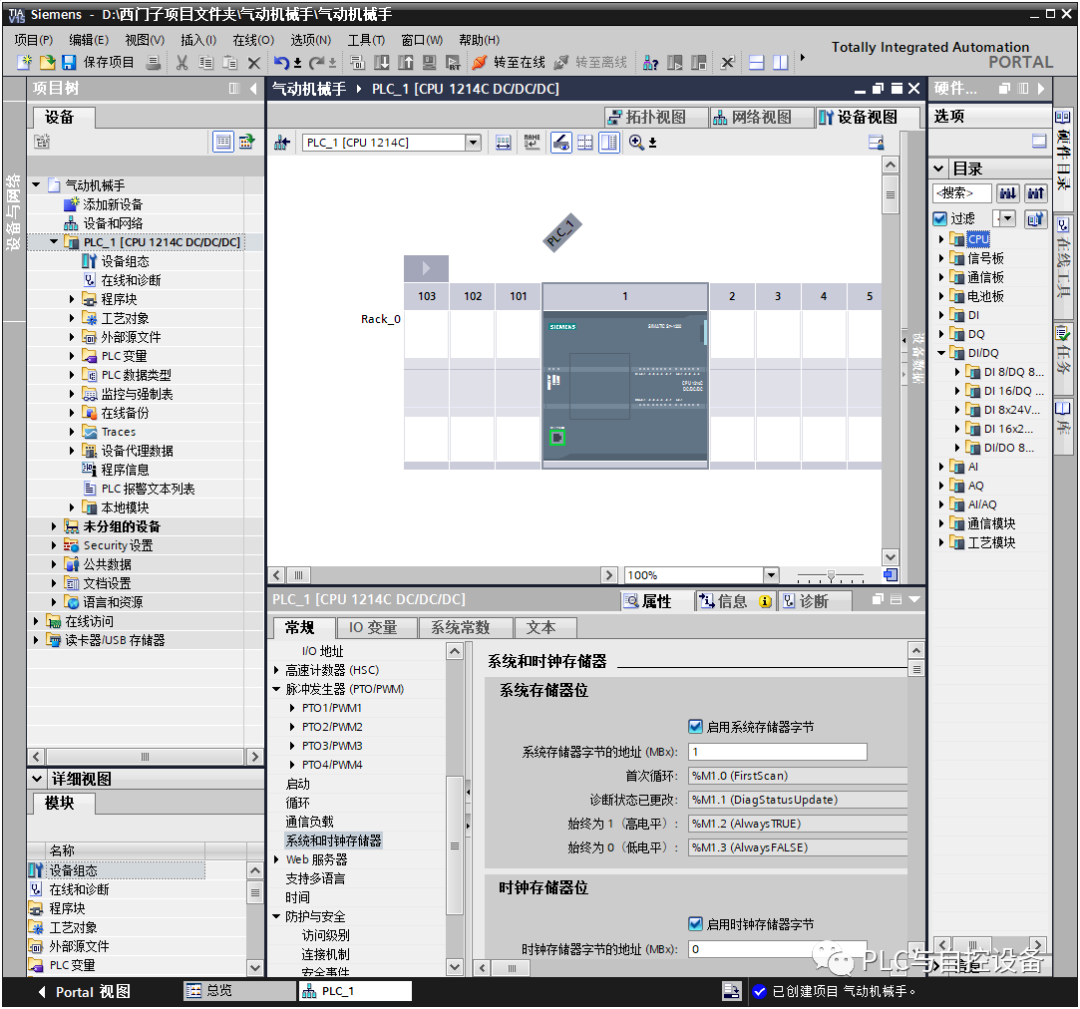
1、新建一个项目,在项目中添加一个PLC设备。 2、配置PLC CPU模块的属性参数。
PROFINET接口的子网。
PROFINET接口的IP地址。
系统和时钟存储器开启。
3、按需要添加其他模块,分配好地址。
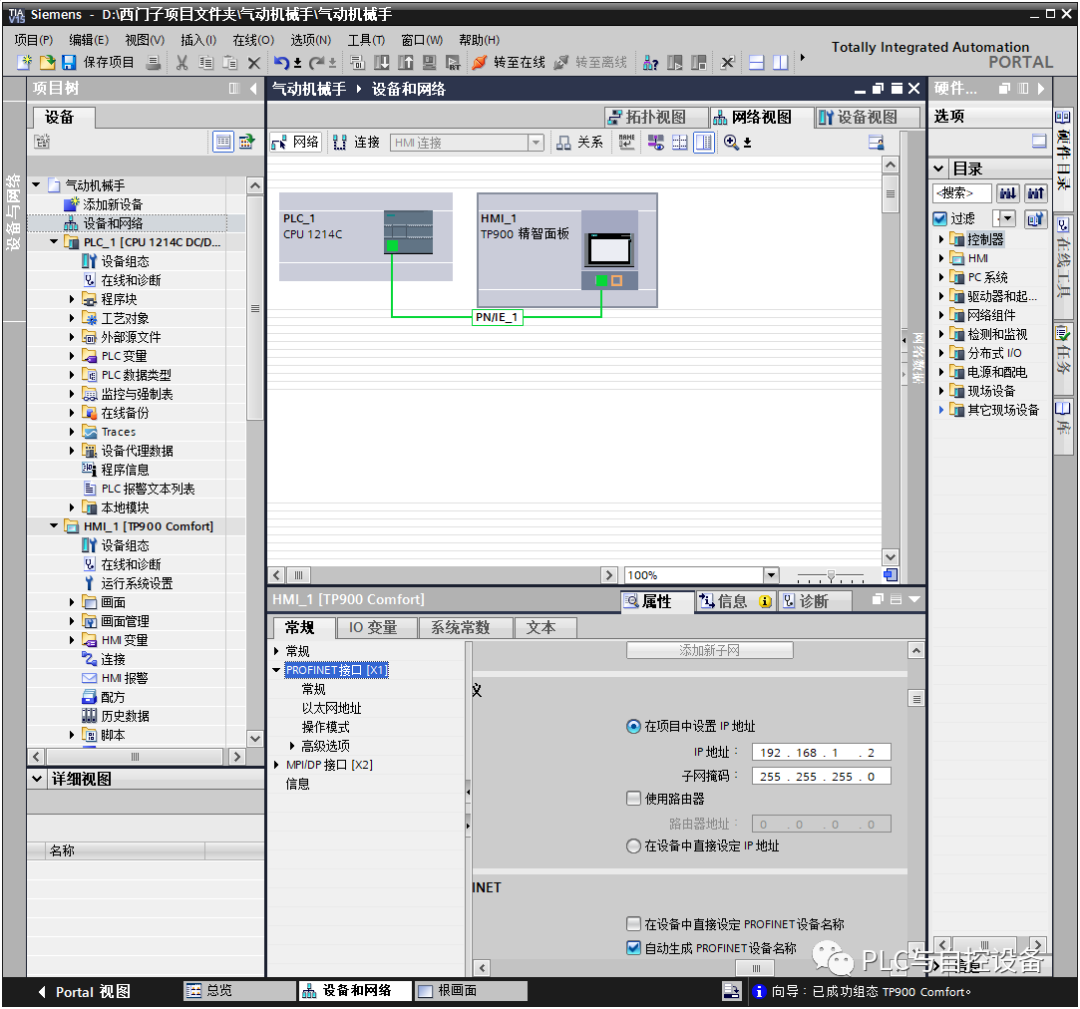
二、组态一个HMI设备
1、在项目树中,找到 ,添加新设备,选择HMI型号,确定。
,添加新设备,选择HMI型号,确定。
2、在“设备和网络”项目的“网络视图”中,用鼠标连接PLC与HMI的网口。如在启动向导时选择了PLC,则可省去这一步。 3、配置HMI的PROFINET以太网地址,与PLC为同一网段,不同网址。 以上2、3可以在添加HMI启动向导时自动完成。
三、编写PLC程序
1、新建一个PLC变量表,如系统比较复杂,可以把M区变量、I区变量、Q区变量分别建立变量表。如为复杂控制系统,变量表最好与系统默认变量表分开。
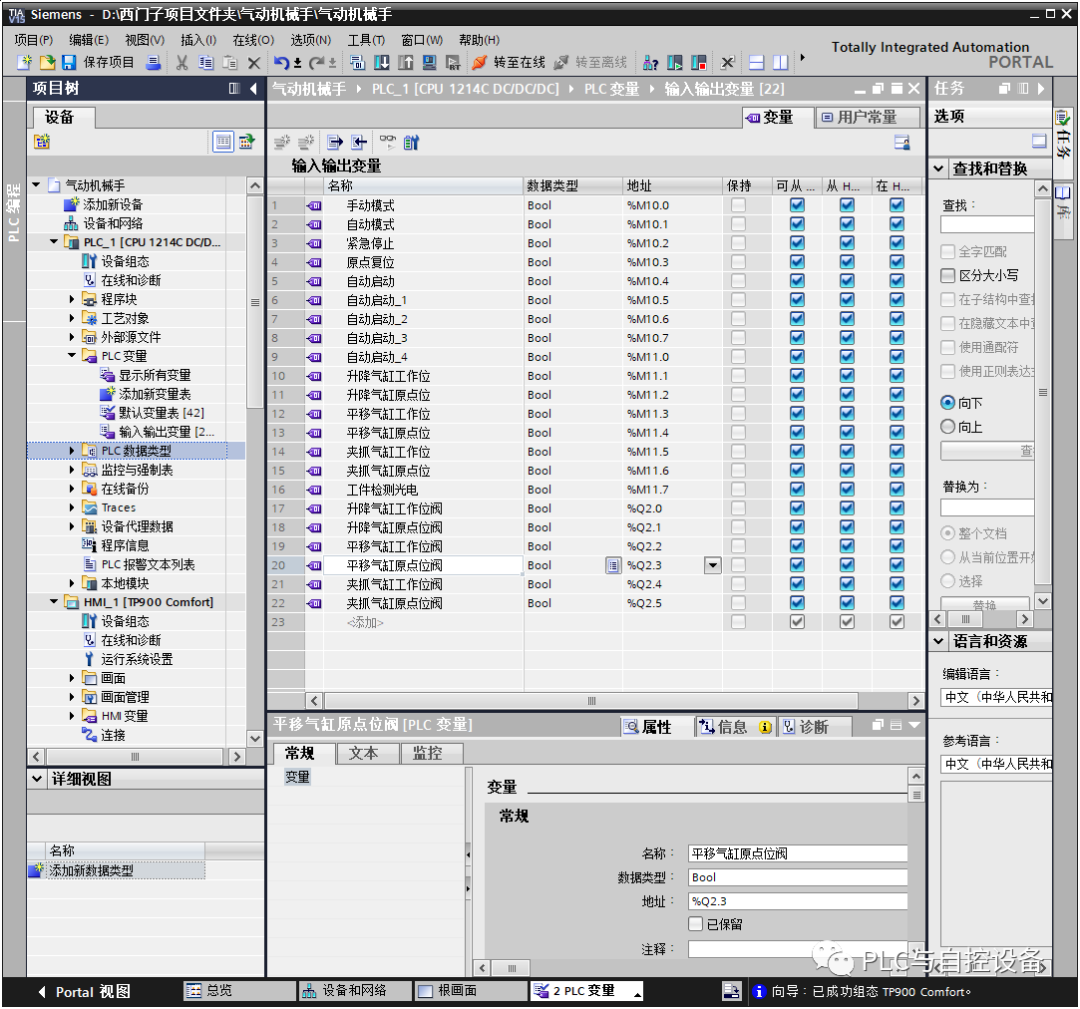
为了演示方便,这里把I区变量改为M区变量。
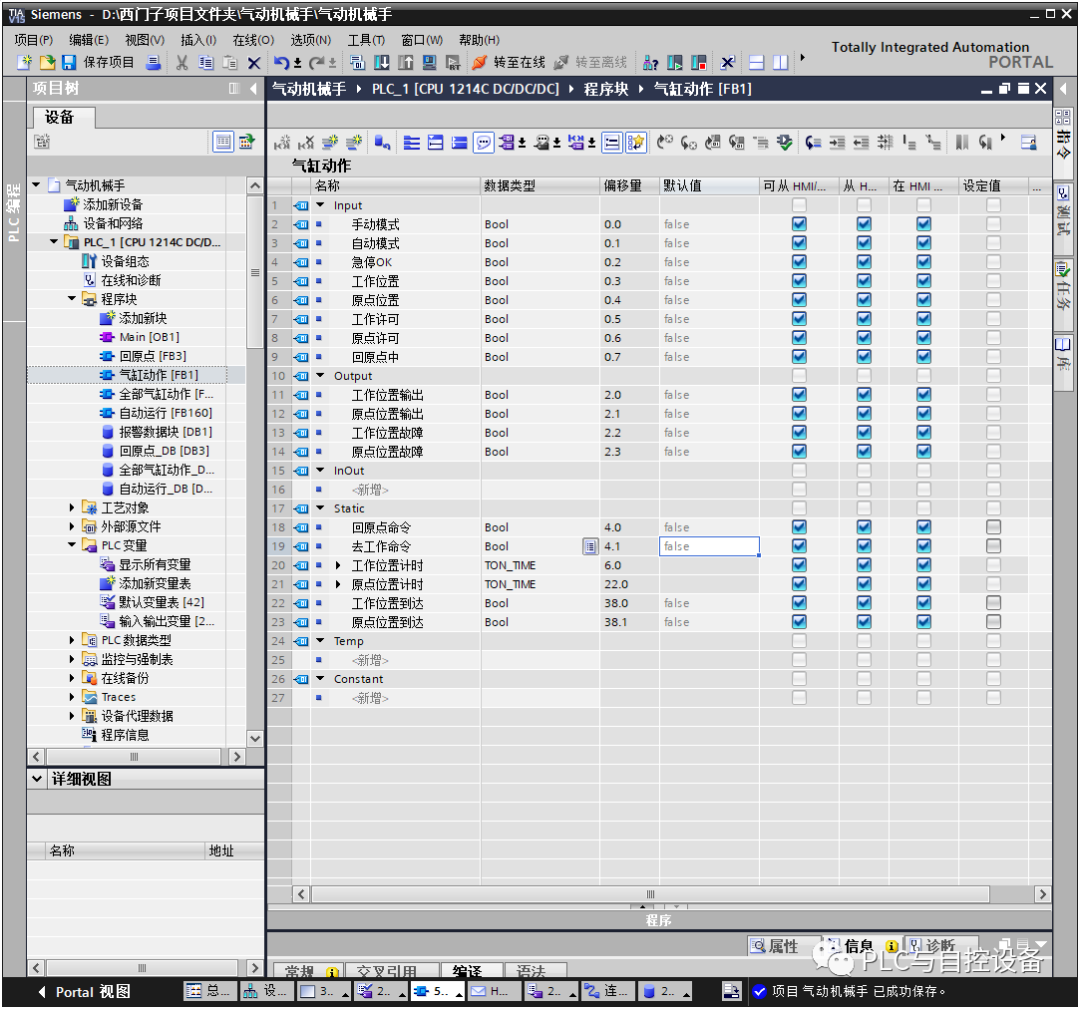
2、新建一个FB程序块,命名为“气缸动作”。
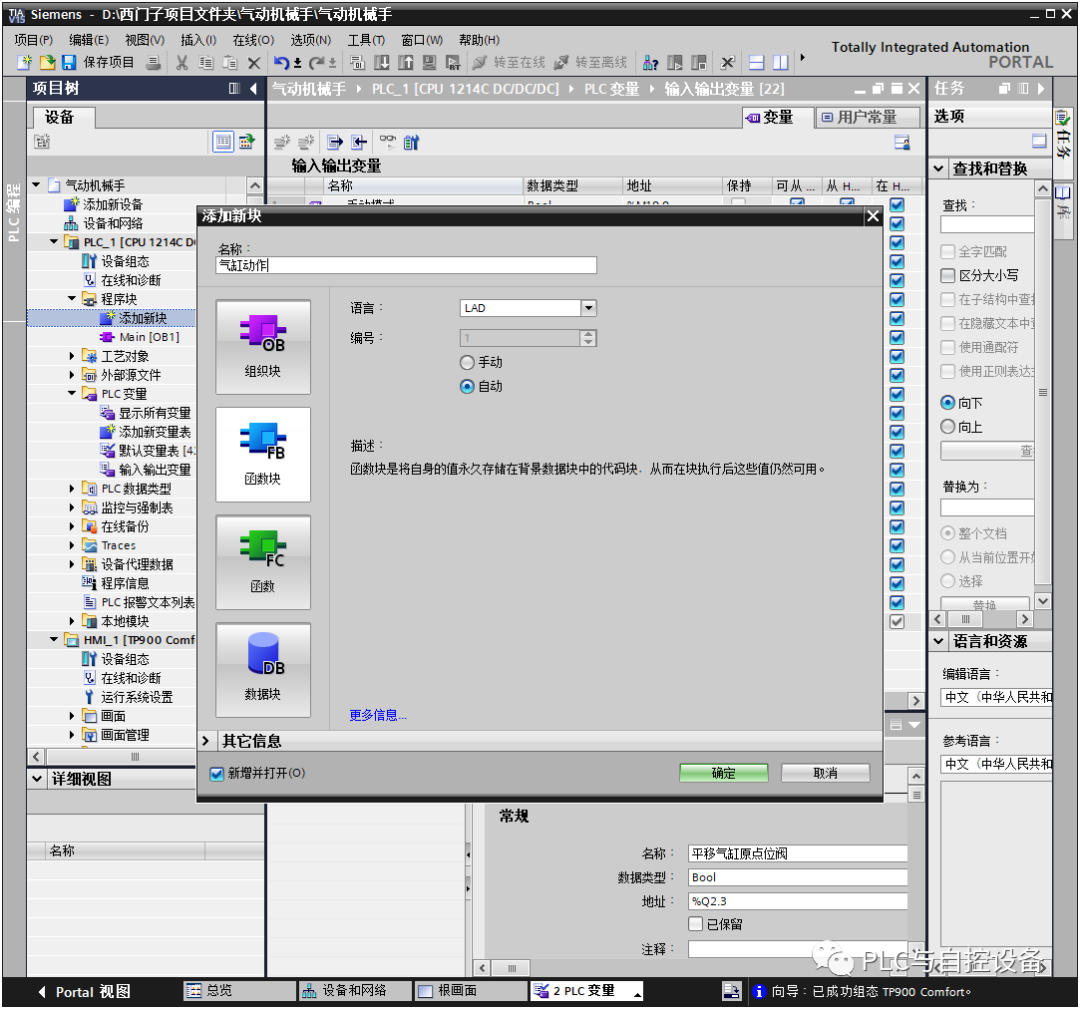
这个FB块为三个气缸的通用块,后面都要调用,取消块的优化访问,设置“气缸动作”FB块接口参数如下图:
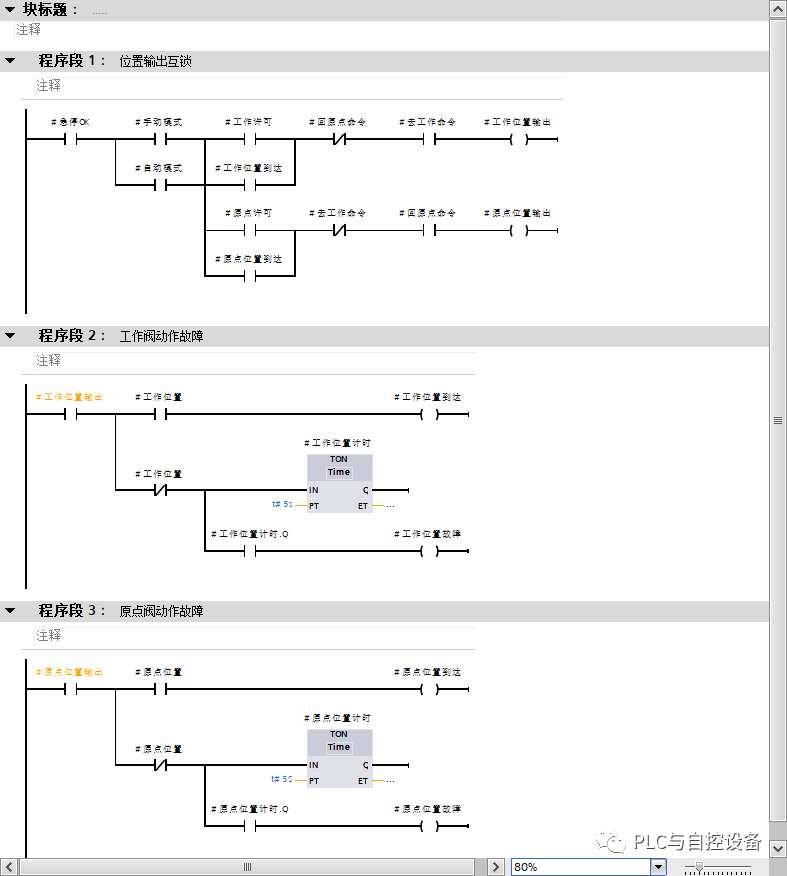
“气缸动作”块的程序如下:
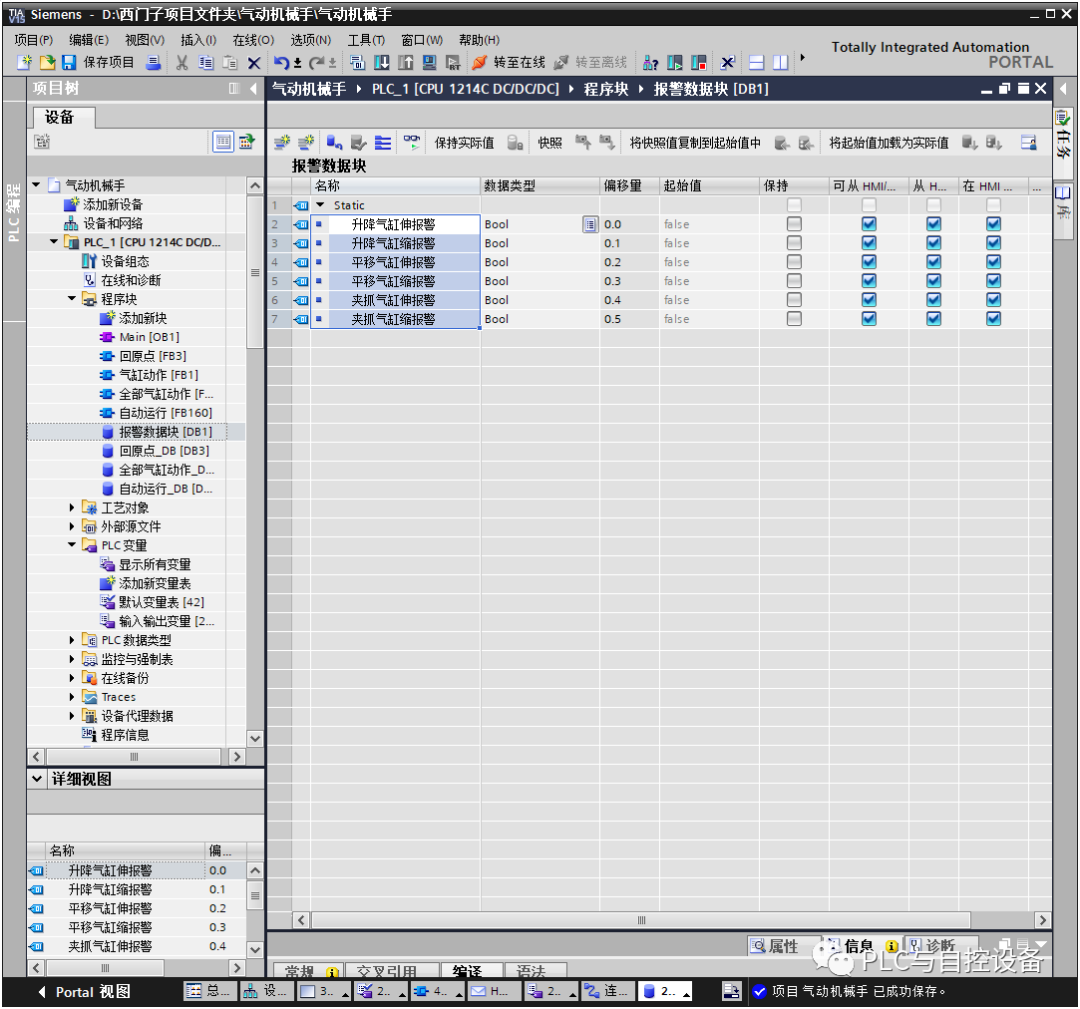
3、建立一个全局DB——“报警数据块”,取消块的优化访问。
4、建立一个总的气缸动作FB——“全部气缸动作”,调用“气缸动作”FB,建立三个多重实例,取消块的优化访问。

以上块需要用变量或常量补充完整块的输入输出接口。
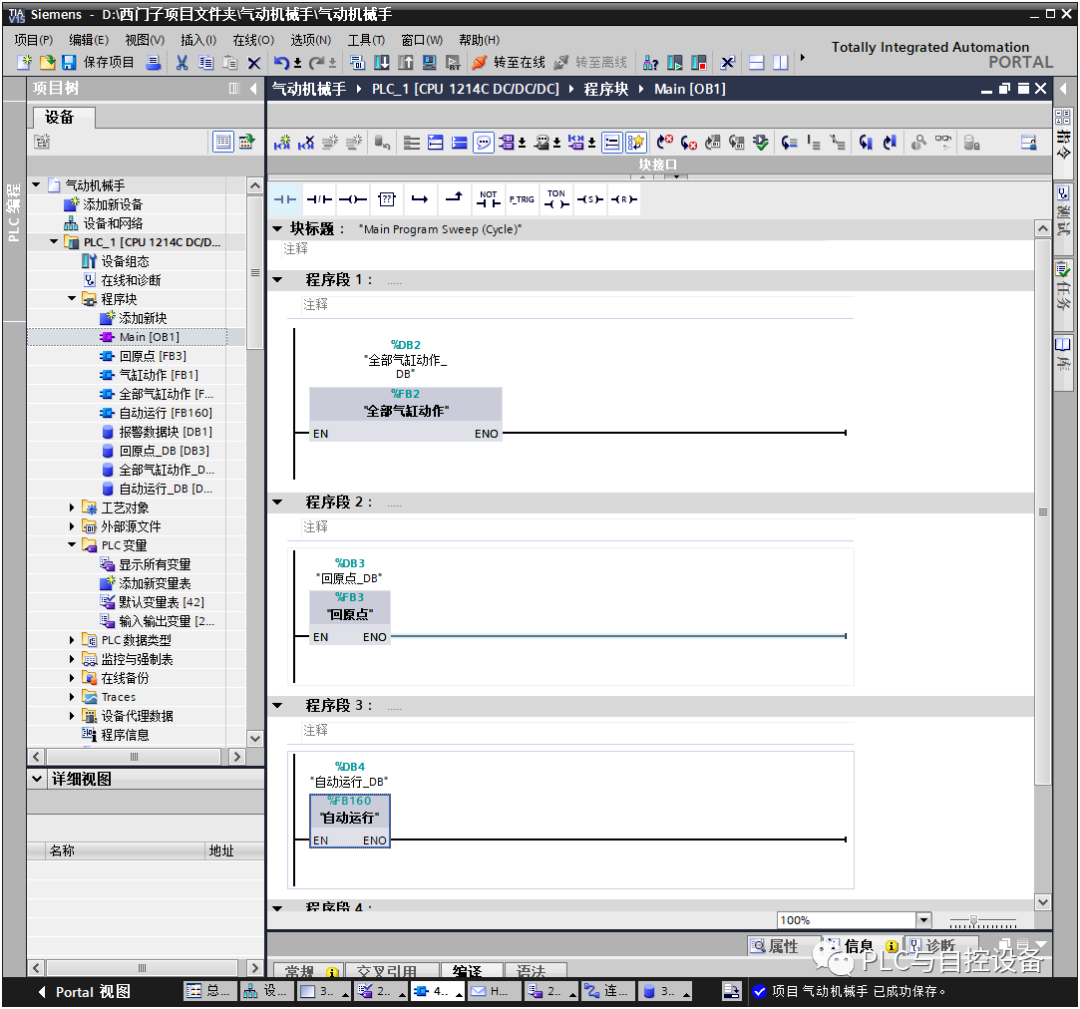
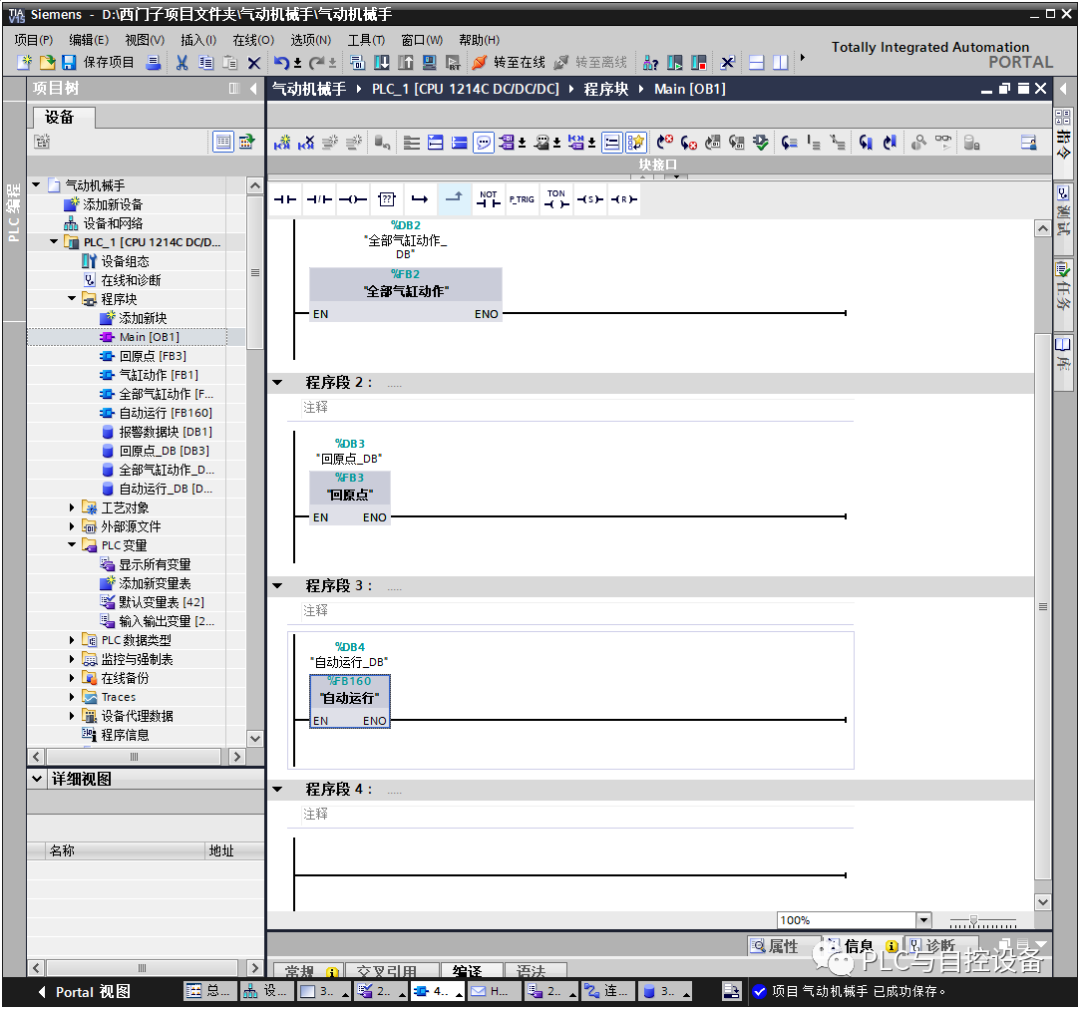
5、在OB组织块“Main”中调用FB“全部气缸动作”,生成背景数据块,气缸动作的程序就做好了。
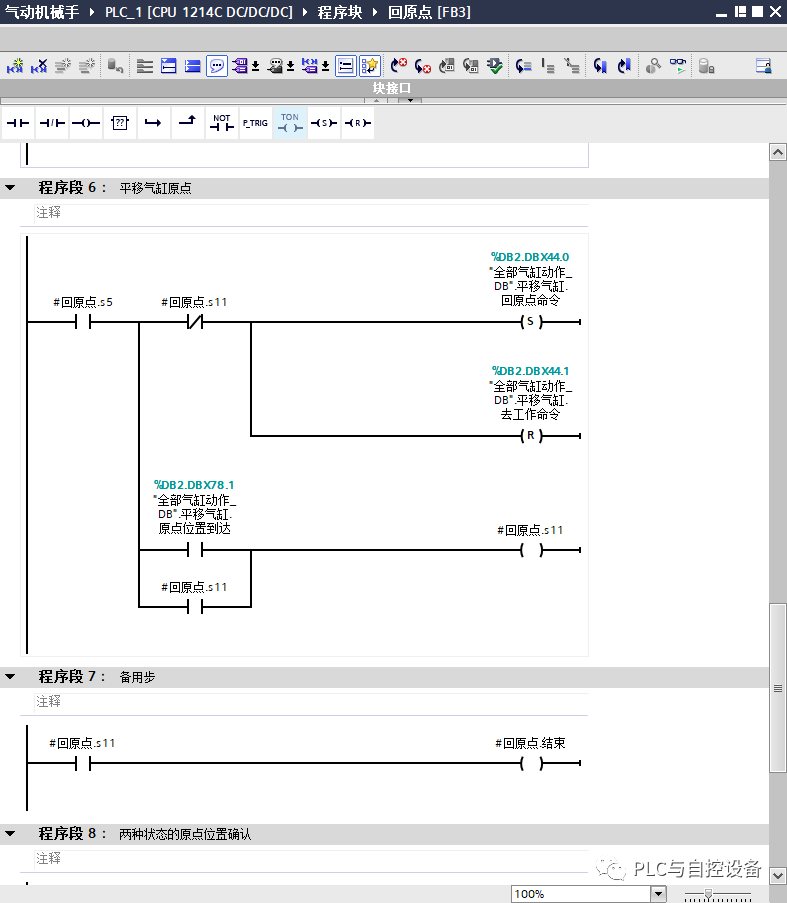
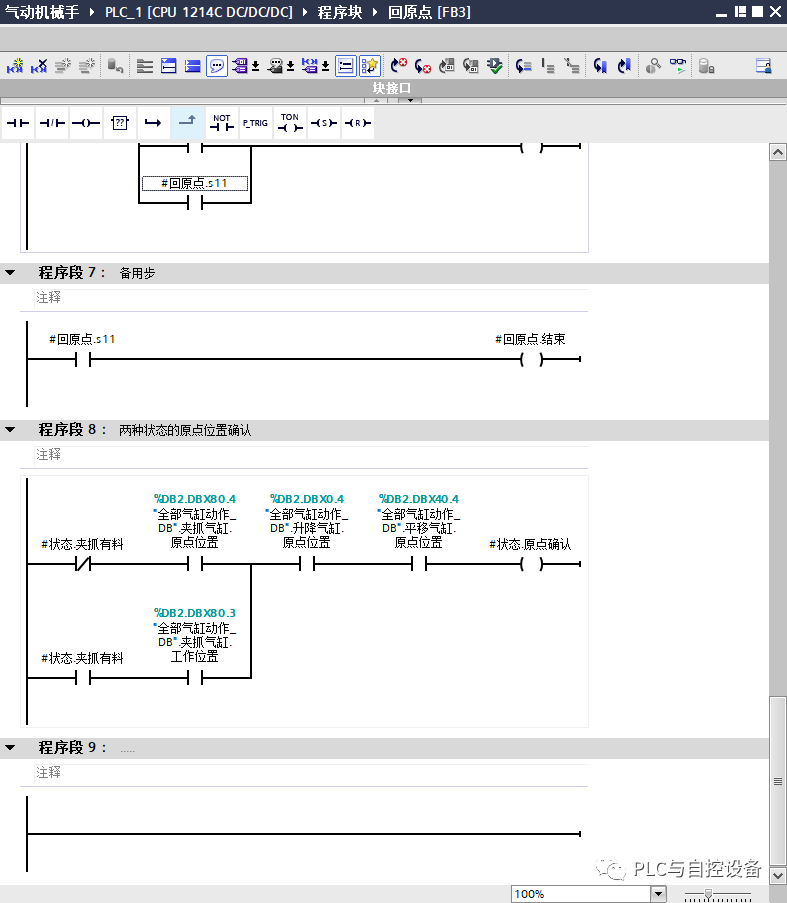
6、建立一个FB,命名为“回原点”,取消块的优化访问,设置块接口参数如下:
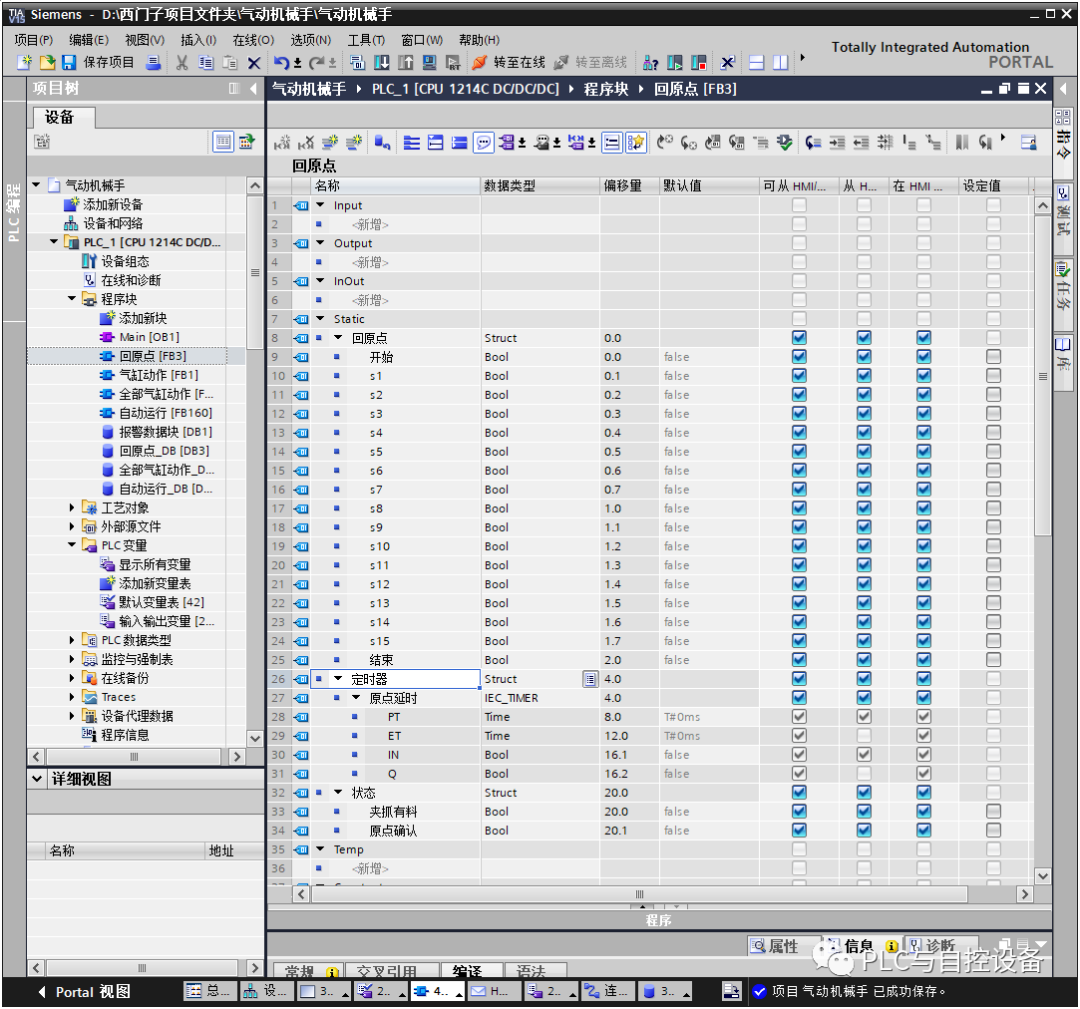
原点延时几秒是为了防止人不小心误触掽到原点开关而产生事故。夹抓有料的原点与夹抓无料的原点过程分开编写。以下为回原点程序:
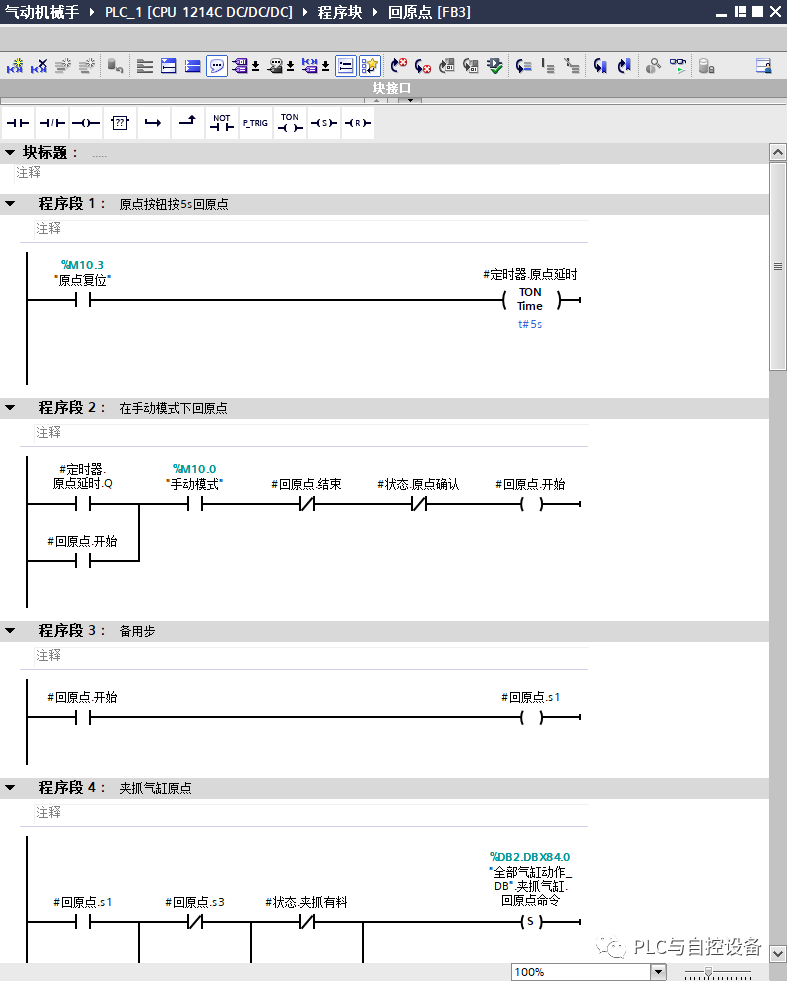
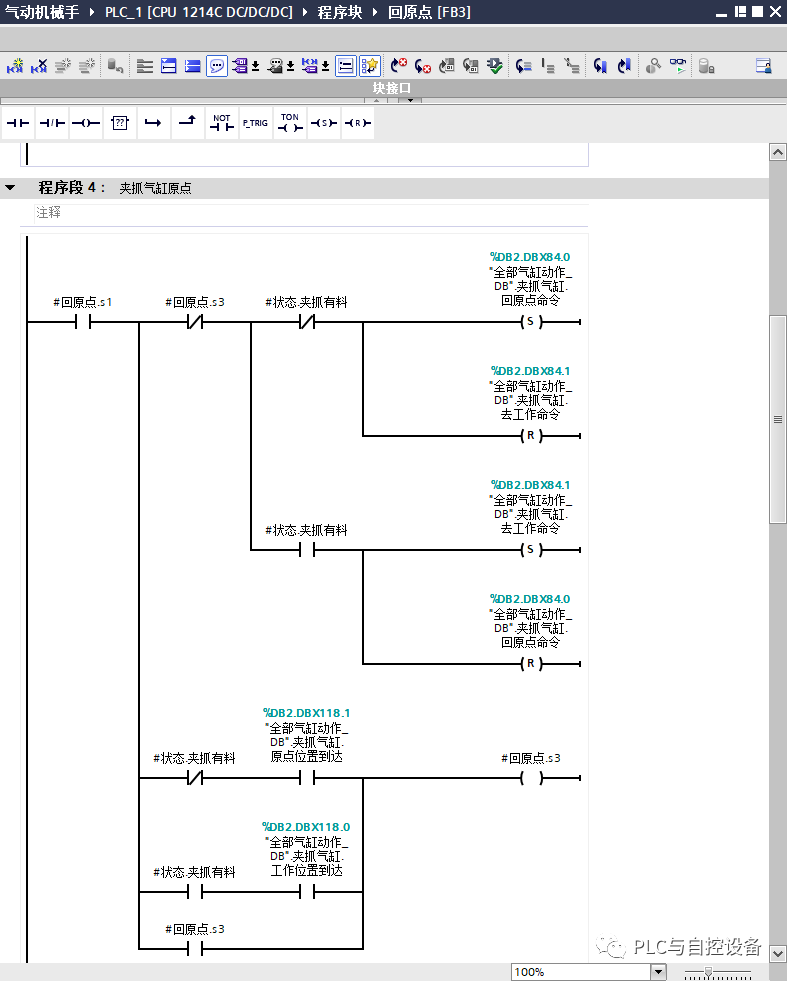
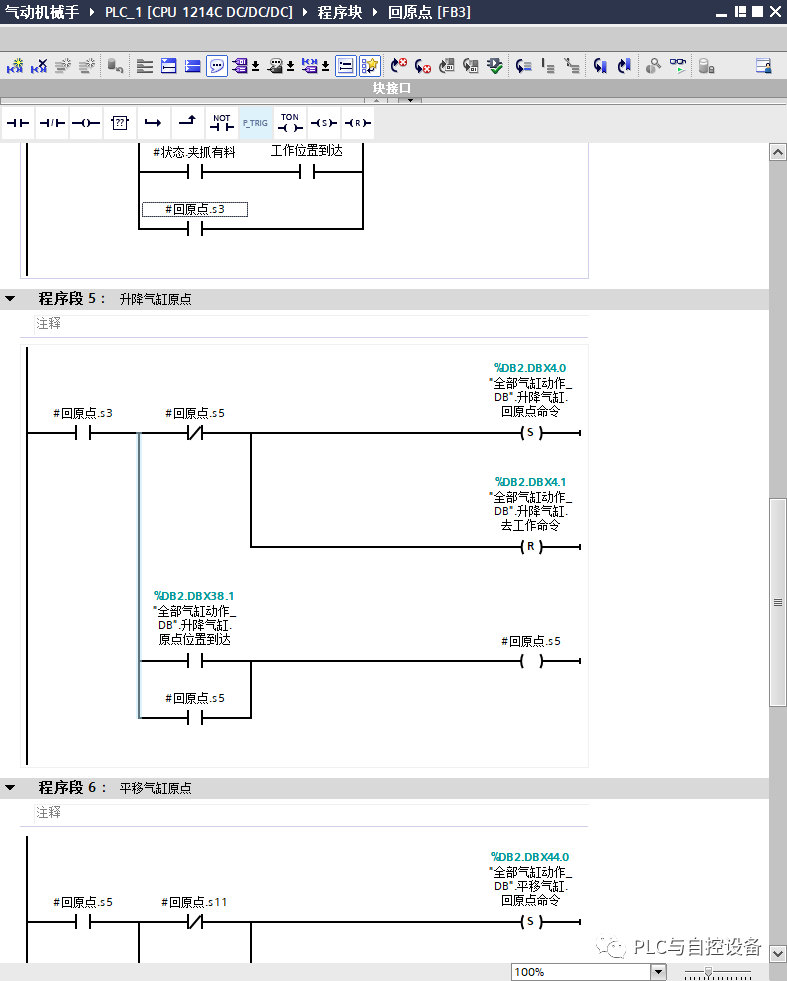
“回原点”FB程序编写完成,在OB组织块中调用,生成背景数据块。
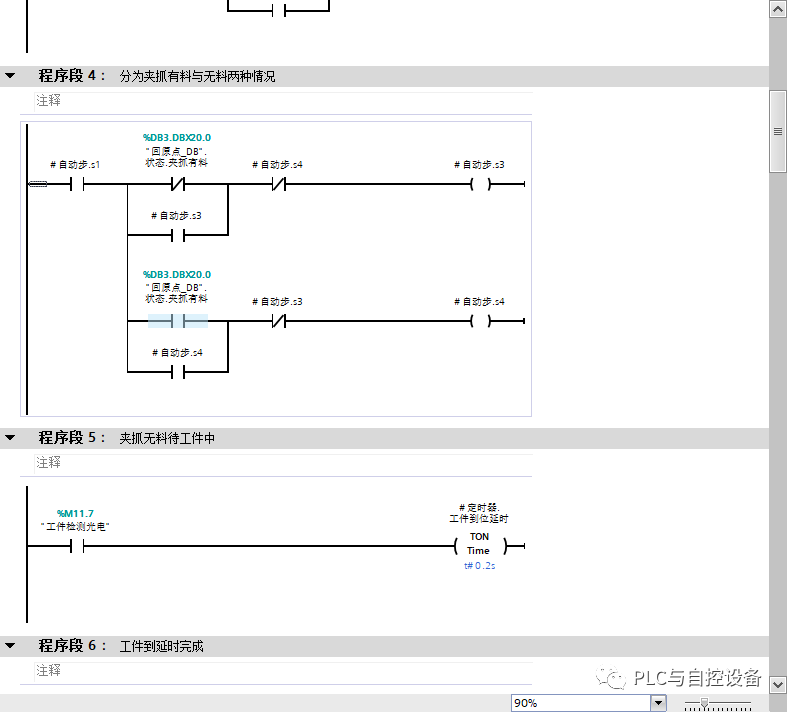
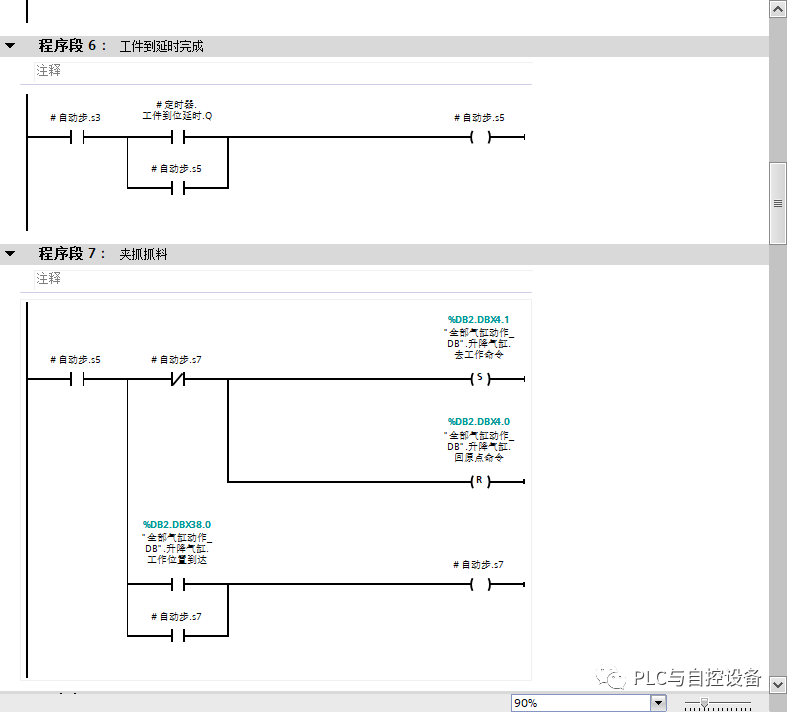
7、建立一个FB,命名为“自动运行”,取消块的优化访问,设置块接口参数如下:
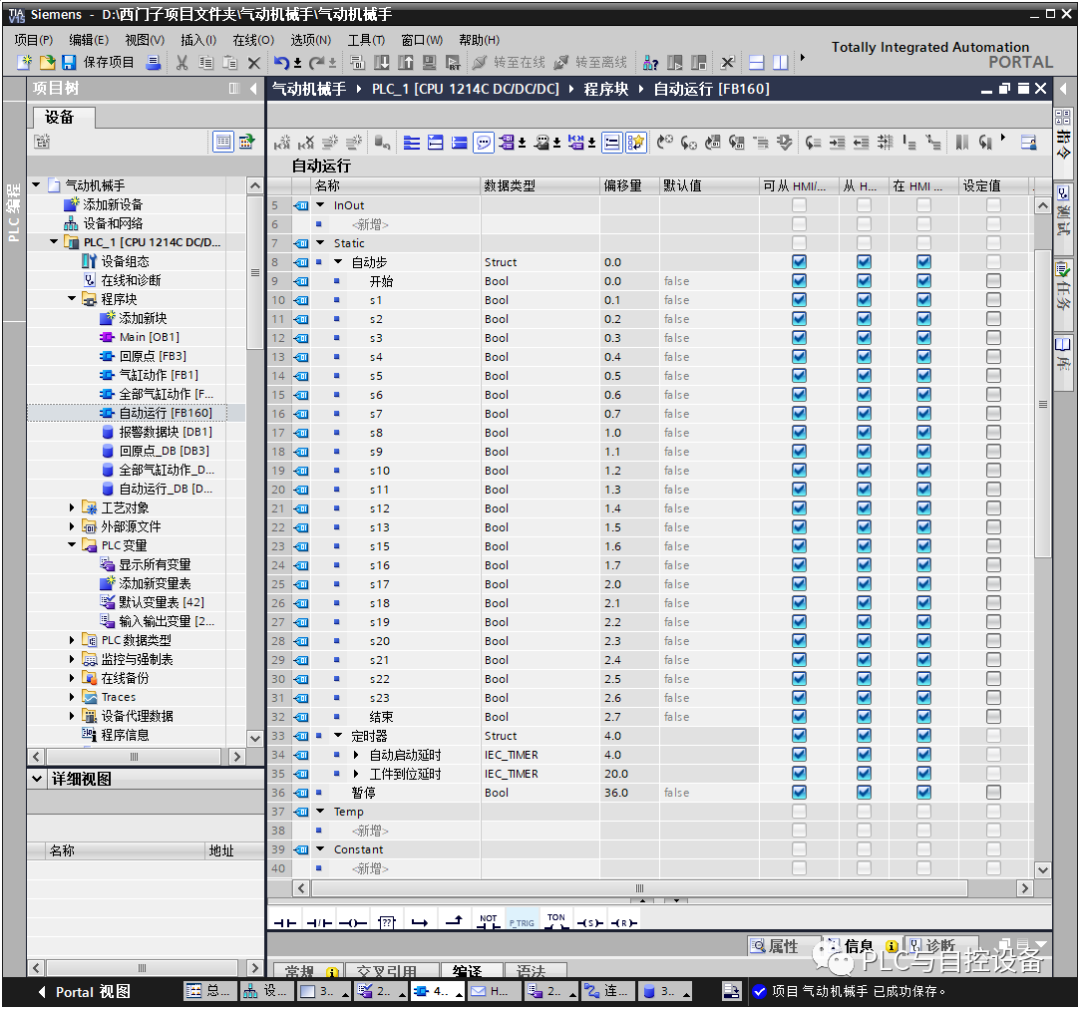
这里也有两个定时器,一个自动启动延时,也是为了防止误操作;另一个工件到位延时,是为了保证抓料的准确性。程序如下:
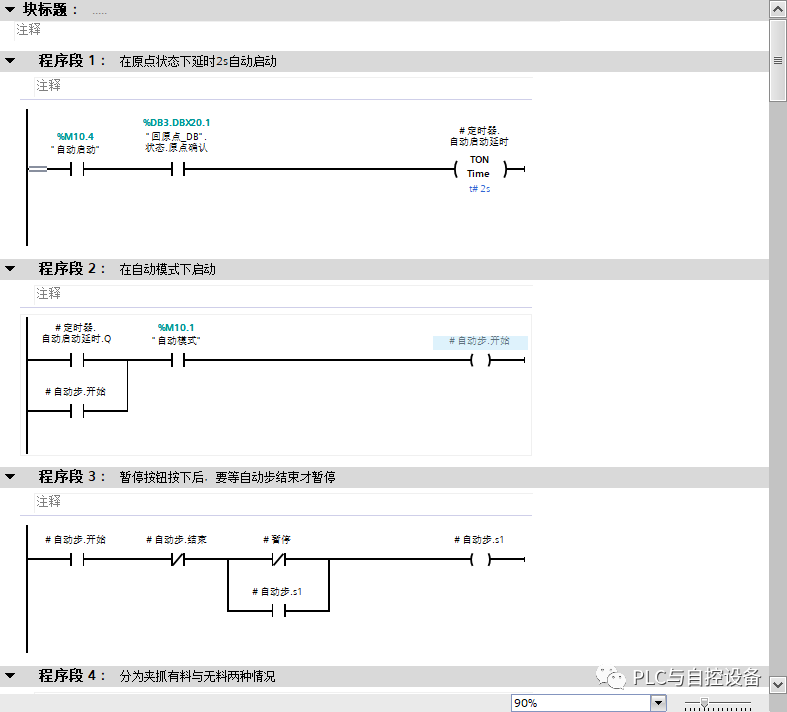


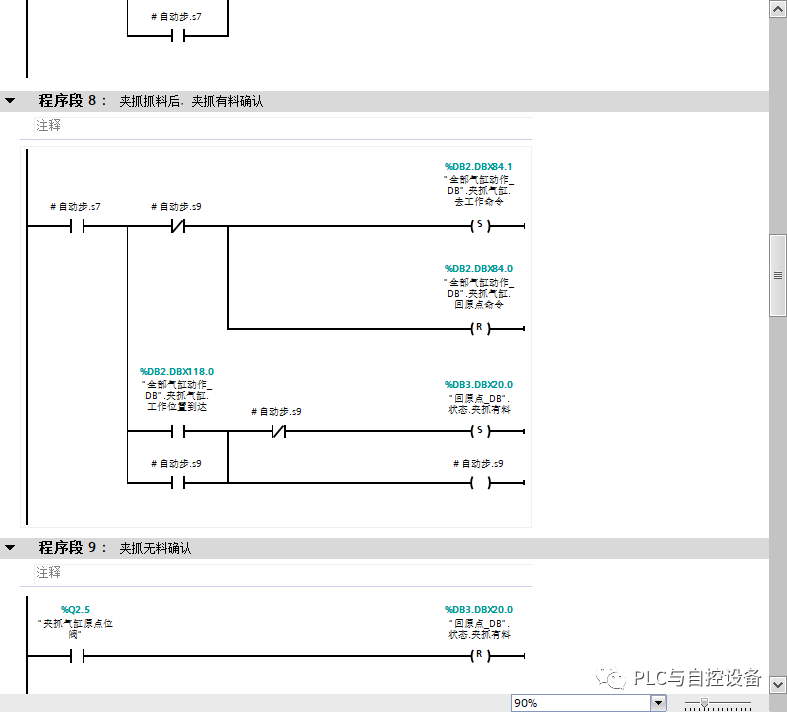
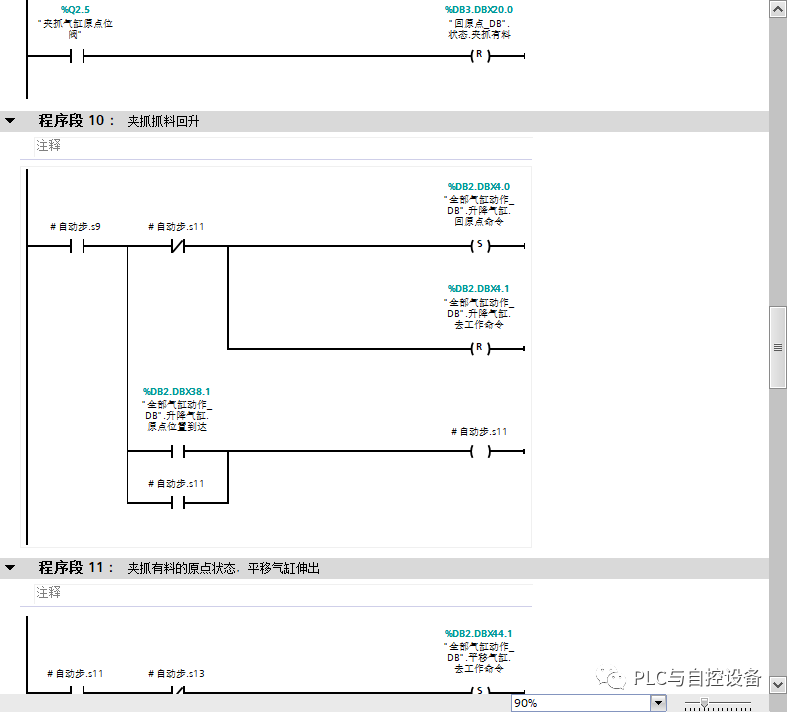
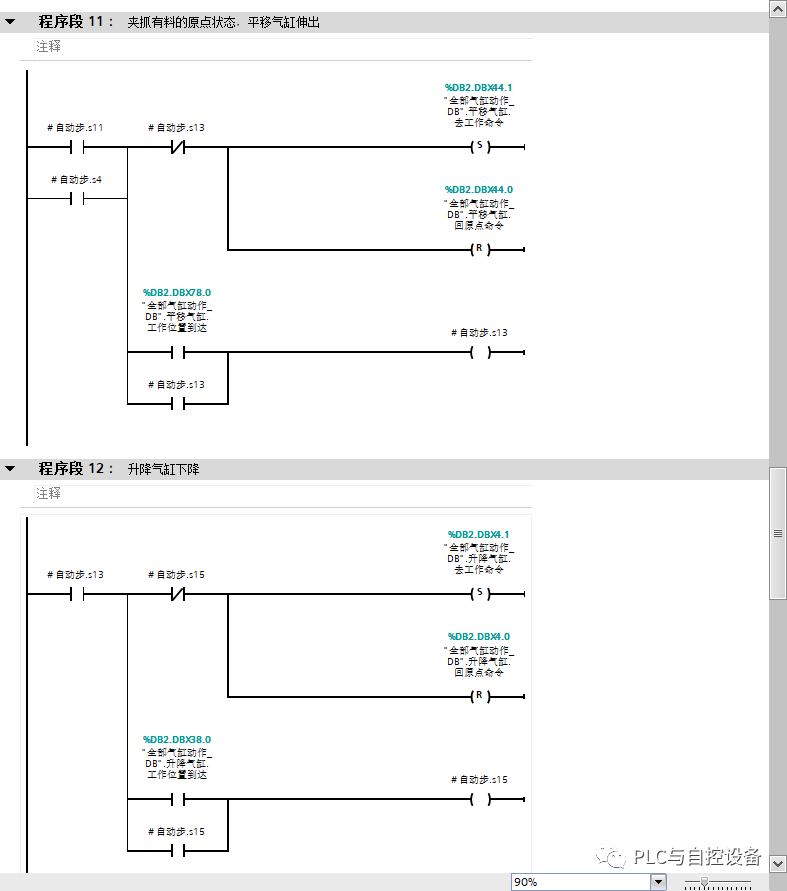
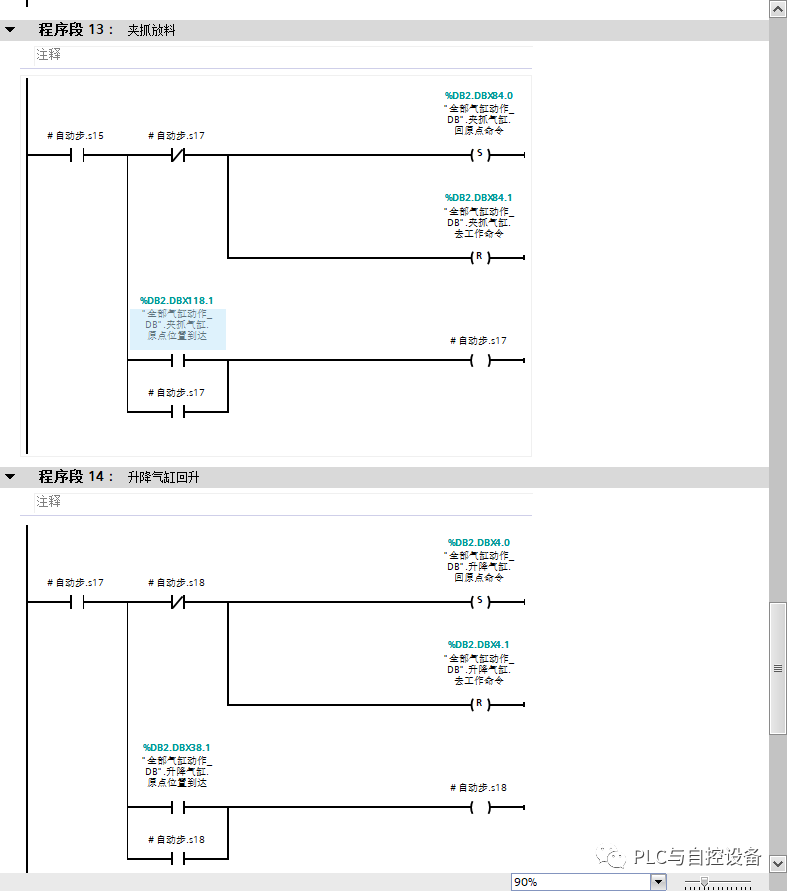
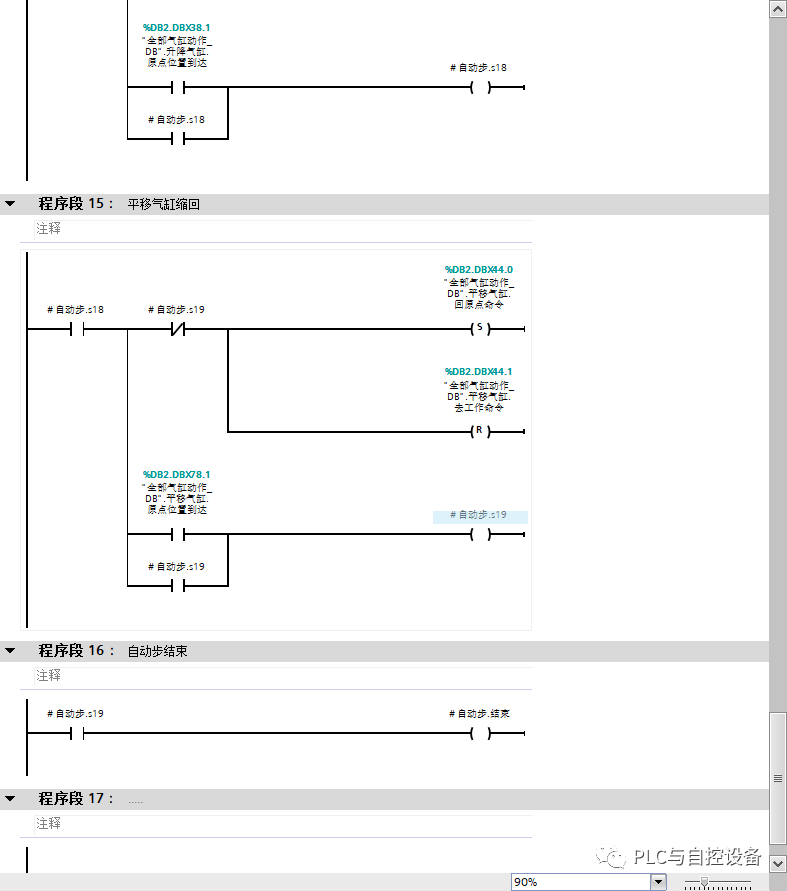
“自动运行”FB程序编写好后,插入组织OB块中,进行调用。
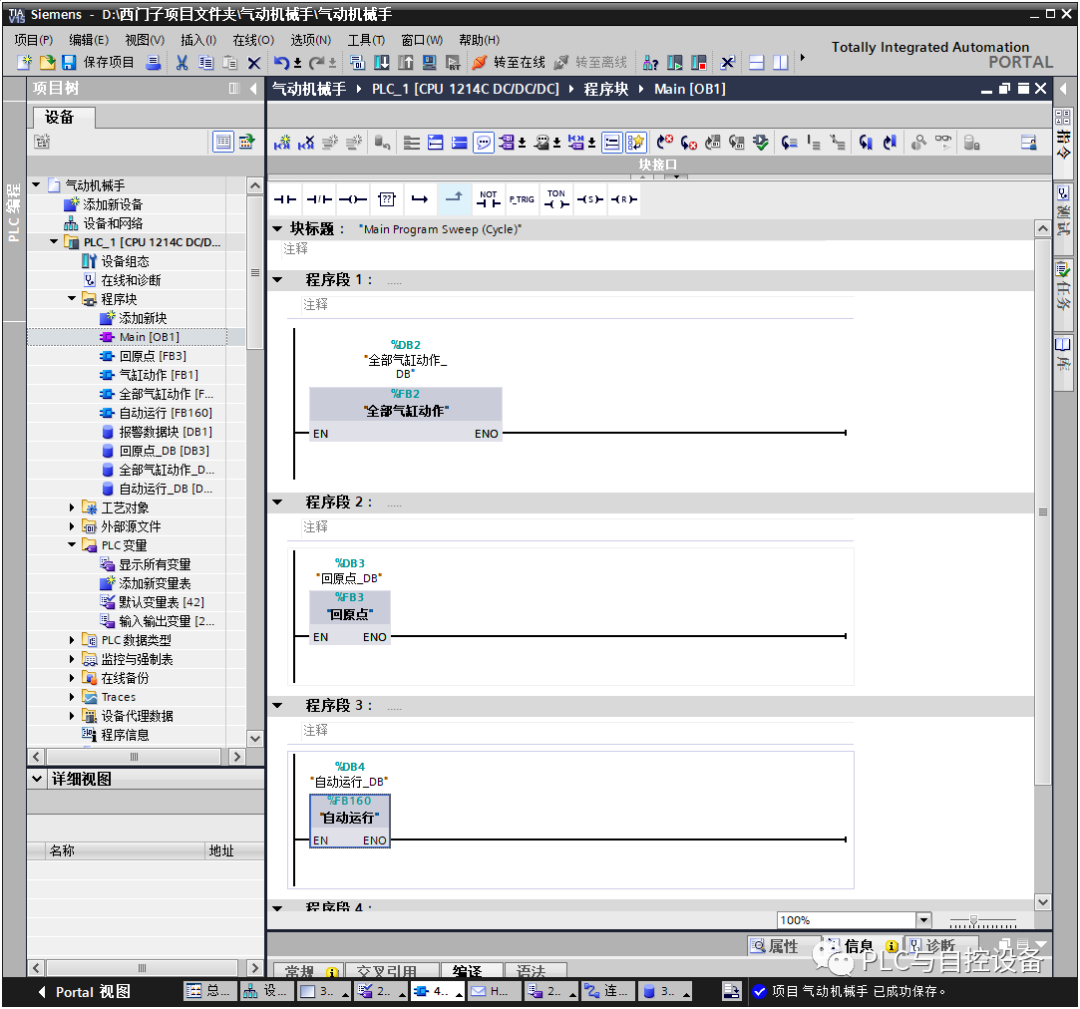
到此,PLC中的程序已编写完成。
审核编辑:汤梓红
-
plc
+关注
关注
5022文章
13452浏览量
467363 -
cpu
+关注
关注
68文章
10949浏览量
213915 -
接口
+关注
关注
33文章
8775浏览量
152405 -
编程
+关注
关注
88文章
3649浏览量
94349 -
S7-1200
+关注
关注
11文章
332浏览量
18188
原文标题:S7-1200/1500气动机械手编程实例
文章出处:【微信号:gkongbbs,微信公众号:工控论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
西门子S7-1200/1500PLC气动机械手程序


基于S7-1200的PLC的编程及扩展
WinCC V7.2与S7-1200的PLC通讯

基于WinCC V7.2与S7-1200/1500 PLC通讯步骤介绍

西门子S7-300和S7-400及S7-1200与S7-1500PLC的编程语言比较表
关于S7-1200或S7-1500 PLC的通信
WinCC与 S7-1200/S7-1500 PLC之间的通信解析
一文解析S7-1200与S7-1500 S7通信







 工商网监
工商网监
评论