 足端复合摆线轨迹介绍
足端复合摆线轨迹介绍
一、摆线
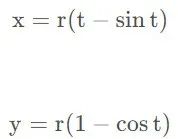
摆线,又称旋轮线、圆滚线,在数学中,摆线(Cycloid)被定义为,一个圆沿一条直线运动时,圆边界上一定点所形成的轨迹。它是一般旋轮线的一种。
总结成数学公式为:
二、足端轨迹约束方程
为达到理想的步态,足端轨迹规划需要满足:
① 行进平稳、协调,无明显的上下波动、左右摇晃和前后冲击;
② 各关节没有较大冲击,特别是摆动相抬腿和落地瞬间实现零冲击抬腿和落地软着陆;
③ 摆动腿跨步迅速,足端轨迹圆滑,关节速度和加速度平滑连续无畸点;
④ 避免足端与地面接触时产生滑动,无摆动腿拖地现象。

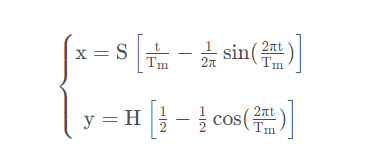
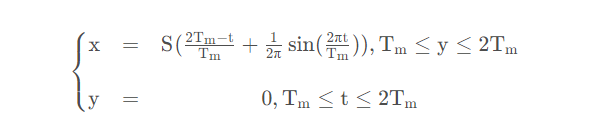
1、水平x方向
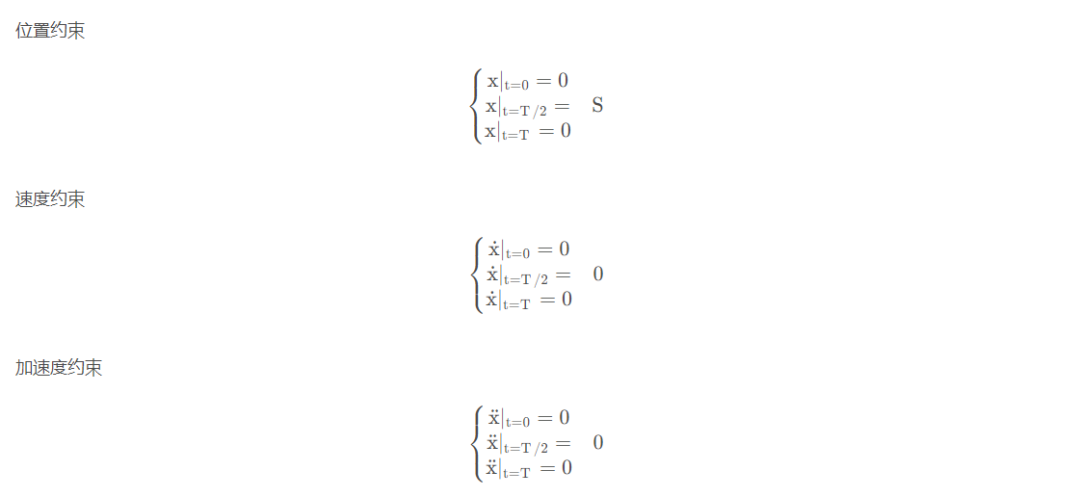
2、竖直y方向

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
28990浏览量
209900 -
运动控制
+关注
关注
4文章
608浏览量
33111
发布评论请先 登录
相关推荐
摆线减速机的工作原理是什么?
摆线针轮减速机全部传动装置可分为三部分:输入部分、减速部分、输出部分。在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个称为转臂的滚柱轴承,形成H机构、两个摆线轮的中心孔即为偏心套上转臂
发表于 09-20 09:11
分解式虚拟模型步态算法VMC介绍
轨迹控制机器人足端曲线使用贝赛尔曲线等轨迹设定,控制方法简单,但是很难适应多变的地形。分解式虚拟模型步态算法VMC介绍VMC 控制方法是利用
发表于 09-15 06:23
分享大神的毕业设计-履带四足复合机器人
WiFi通信配置6.2 运动控制内容:单腿正解FK单腿逆解IK姿态逆解足端摆线轨迹计算Trot步态模式Walk步态模式*VMC算法 -- 伪闭环(待测试)6.3 代码文件说明:lib
发表于 06-09 11:37
绘制根轨迹的MATLAB函数介绍
绘制根轨迹的MATLAB函数介绍
4.4.1 rlocus
⒈.功能:绘制系统的根轨迹。
⒉.格式:
[r,k]=rlocus(
发表于 07-27 14:22
•7231次阅读
摆线针轮减速机原理图、结构图、性能及型号表示方法
摆线针轮减速机原理图、结构图、性能及型号表示方法
摆线针轮减速机原理/摆线减速机结构原理行星摆线针轮减速机全部传动装置可分为三部分
发表于 09-12 17:37
•3.9w次阅读
仿生四足机器人设计及运动学足端受力分析
仿生四足机器人腿部结构设计与生物腿部实际结构存在差异,足端与地面的刚性接触力对于控制其运动平稳和收敛会产生不利影响。为解决上述问题,分析德国牧羊犬骨骼结构,通过图像处理和分析手段获取牧羊犬对角小跑步
发表于 02-08 16:07
•2次下载
摆线齿形谐波齿轮传动设计
谐波齿轮传动具有体积小,重量轻,传动比大,精度高,承载能力强等诸多优点,被应用到航空航天、机器人等众多高精尖领域。 本研究综合考虑谐波传动齿形对其啮合特性的影响,以公切线式新摆线齿形作为研究对象
发表于 04-13 14:06
•1次下载
双足行走机器人步行原理是什么?步态轨迹规划的详细分析资料概述
通过对双足机器人行走过程中一些特殊点进行采样分析,对比人类自身行走步态的观察测量值,采用三次多项式插值来计算出双足行走机器人在行走过程中的行走轨迹,按人体比例设定参数,计算得出了1条比较光滑平稳
发表于 08-13 08:00
•103次下载
功率放大器在复合超声电机正反向运动中的应用
形叠加而成)驱动弯弯复合超声电机,测试其驱动足的运动轨迹和样机基本输出特性。实验过程:01测试驱动足轨迹;用函数信号放大器产生信号,经过功放

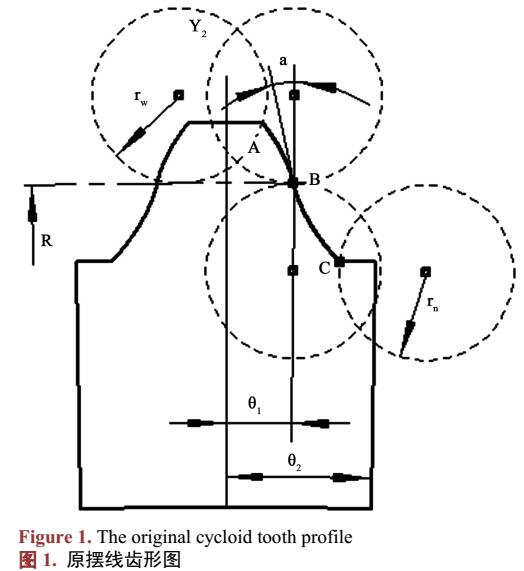
机器人摆动相轨迹设计
1、摆动相轨迹设计 基于第二节中提到的原则,文献[1]中提出了一种基于复合摆线形式的轨迹规划方法,并在文献[2]中得到了验证和使用。 针对机器人足底与地面接触时会产生滑动和行走过程中拖
摆线针轮行星减速器的工作原理
摆线针轮行星减速器是一种广泛应用于工业机械传动系统中的减速装置。它由内部的轴承箱和外部的行星轮组成,通过行星轮的相对运动实现输入轴与输出轴之间的减速传动。下面将详细介绍摆线针轮行星减速器的工作原理





 工商网监
工商网监
评论