 什么是机器人最优控制和逆最优控制
什么是机器人最优控制和逆最优控制

机器人在执行期望目标任务时,我们希望机器人能精确地达到人类所预设的目标,那么我们就来理解下什么是最优控制和逆最优控制。
因此,最优控制是期望最小化或者最大化目标。
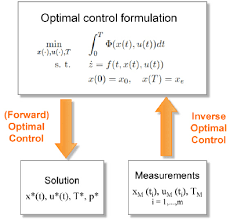
很显然最优控制和逆最优控制是一种相反的关系:
最优控制理论是数学优化的一个分支,它处理在一段时间内为一个动态系统找到一个控制,使目标函数得到优化。目标是找到目标控制律,使得优化目标函数。
而逆最优控制作为将生物运动传递给机器人的有前途的方法。逆最优控制有助于(a)理解和识别基于测量的生物运动的潜在最优标准,以及(b)建立可用于控制机器人运动的最优控制模型。
逆最优控制问题的目的是确定——对于给定的动态过程和观察到的解——产生解的优化准则。从数学的角度来看,逆最优控制问题是困难的,因为它们需要解决最优控制问题中的参数识别问题。
在最优控制中,总的来看,其本质就是让系统以某种最小的代价来让系统运行,当这个代价被定义为二次泛函,且系统是线性的话,那么这个问题就称为线性二次问题,设计的控制器(即问题的解)可以称为LQR(Linear Quadratic Regulator)线性二次调节器。
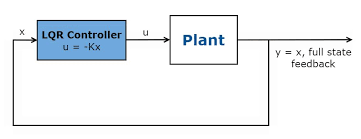
若被动系统是线性化表示,成本函数描述为二次泛函,那么这种问题就可以被认为是线性二次问题,求解此问题,即可以成为LQR问题!
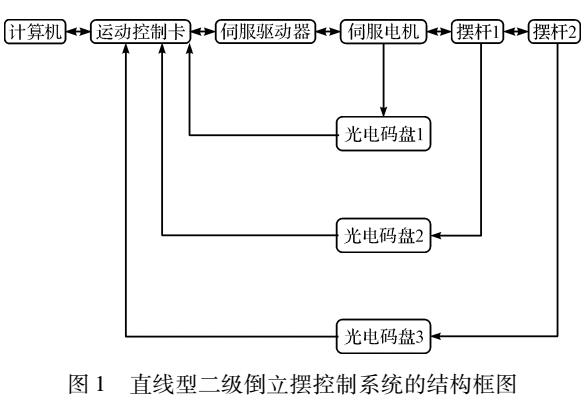
常见的模型为倒立摆模型:
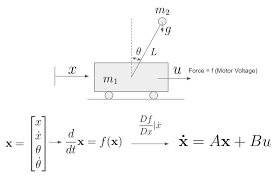
寻找模型的最佳参数的问题被转化为一个 LQR 问题,该问题最大限度地减少了人力并优化了闭环行为。
LQR 控制器的系统具有良好的稳定性,并且在某个性能指标方面是最佳的。然而,当系统高度不确定时,LQR 控制不能保证鲁棒稳定性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17860浏览量
195018 -
机器人
+关注
关注
213文章
31391浏览量
223547 -
调节器
+关注
关注
5文章
916浏览量
49622
发布评论请先 登录
相关推荐
热点推荐
主动队列管理建模及最优控制策略
主动队列管理建模及最优控制策略针对主动队列管理(AQM)研究中缺乏系统的理论分析的问题,引入最优控制理论进行分析,得到了主动队列管理的数学模型,该模型包括两个差分方程,分别描述队列长度和平均队列长度
发表于 06-14 00:14
0038《最优控制理论》科学出版社-2003.pdf(5M)
;fromuid=286650038《最优控制理论》科学出版社-2003.pdf(5M)希望大家多顶顶,提升提升人气。`
发表于 12-16 08:49
主动队列管理建模及最优控制策略
针对主动队列管理(AQM)研究中缺乏系统的理论分析的问题,引入最优控制理论进行分析,得到了主动队列管理的数学模型,该模型包括两个差分方程,分别描述队列长度和平均队列长
发表于 05-25 21:44
•17次下载
大纯滞后对象的最优控制
本文针对工业过程控制中普遍存在的大纯滞后对象,从最优控制的角度,研究了大纯滞后对象的LQ逆问题,给出了一般的设计过程。仿真研究表明,运用最优控制的方法,能够使大纯
发表于 06-15 11:32
•7次下载
状态时滞系统的输入多采样最优控制
本文针对离散状态时滞系统,首先将其变形为无时滞形式,设计出最优控制器;然后运用离散提升技术对输入进行多采样,得到扩展的离散系统模型,再运用最优控制技术对扩展系
发表于 08-10 10:53
•16次下载
最优控制在直流调速系统中的应用
提出了一种以线性二次型性能指标为基础的综合性最优控制问题,研究了单输入系统开环和闭环特征多项式与性能指标中的加权矩阵之间的关系,根据这些关系可以确定一个具有指定闭
发表于 06-15 16:43
•42次下载
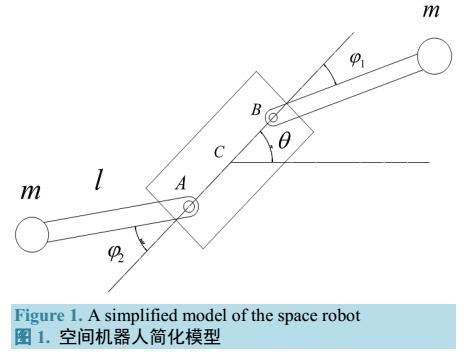
基于Legendre伪谱法的空间机器人姿态运动的最优控制
的姿态会随着机械臂的相对运动而发生变化,增大了载体姿态控制难度的同时,为控制其姿态也提供了一种方法。Fernandes等根据空间机器人的非完整性质提出空间机器人的关节运动规划的
发表于 01-31 13:48
•0次下载
直线二级倒立摆系统的H∞鲁棒最优控制
针对存在模型参数不确定性和外部扰动的直线型二级倒立摆系统的稳摆控制问题,对如何实现倒立摆系统鲁棒稳定的同时,还保证其达到期望的最优控制性能和H性能指标的稳定性控制问题进行了研究。基于状态反馈
发表于 03-06 14:11
•1次下载
LQR控制算法之最优控制
LQR算法是最优控制中经典的算法,而且LQR是一个应用较多的控制算法,所以在这里我以最优控制为起点介绍LQR控制算法。
注意LQR控制




评论