 LDO中使用cascode运放的补偿方法
LDO中使用cascode运放的补偿方法
上次讲了一篇文章里关于LDO的buffer设计的部分,那篇文章里还有很重要的一部分是讲如何在全负载范围内对LDO进行补偿,那么这次就继续总结一下。
1. LDO电路结构
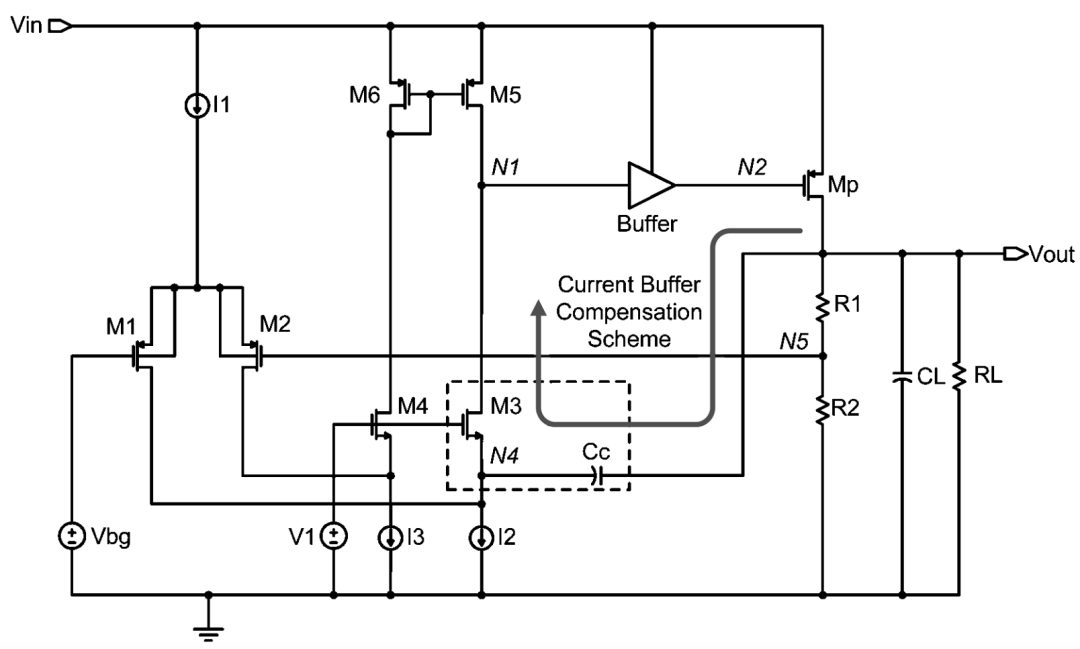
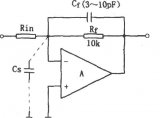
图一
我们先看看这个LDO的基本结构,如图一。这就是常规的一级folded cascode运放+一级buffer+一级pass device输出。正如我们上一篇文章所说,这个LDO的输出接了大的片外电容CL(比如1μF),所以主极点一直在输出端。重复一下我们遇到的稳定性问题: 在轻负载(IL接近0)时,输出电阻大,主极点低;重负载(IL接近LDO最大负载电流)时,输出电阻小,主极点高。 要保证全负载范围内的稳定性,之前我们设计了一个好的buffer,使N2电阻较小,将N2极点推到高频而可以忽略;在这基础上仍需增加一个补偿电容Cc(如图一),用于在某些负载情况下分裂主极点和次极点N1。

图二
将系统框图整理为图二。此处忽略N2处的极点,同时B=R2/(R1+R2),为电阻串分压比,Roeq=rop||(R1+R2)||RL,为输出节点电阻。从图示处断开环路可以求得环路增益:


其中,我们认为Cc和CL都远大于C1。从表达式可以看出,系统存在三个极点(分母有s的三次方),一个左边平面零点gm3/Cc。接下来,我们可以具体分析不同负载下的零极点分布。
2. 数学分析
2.1 轻负载
在IL=0的时候,Mp的电流只有电阻串上的这部分,也就是Vout/(R1+R2),通常非常小,比如1~3μA。此时gmp为最小值,为了化简表达式,认为CLRoeq>>gmpro1CcRoeq。则重新化简T(s)为:

可见,左半平面零点抵消了一个非主极点,最终系统简化为普通两阶系统。主极点和次主极点分别为:


容易发现, 此时Cc并未起到极点分裂的作用,主/次极点仍和未补偿时一样 。但由于此时输出电阻大,主极点本来就比较低频,仅靠系统自身即可保证稳定性。
2.2 重负载
随着IL逐渐增大,gmp增大,输出电阻减小。gmp正比于√IL,而rop正比于1/IL,所以总的开环增益正比于1/√IL,随着IL增大而减小。而输出端主极点正比于IL,随着IL增大而增大。 增益带宽积GBW或者单位增益带宽ωu正比于√IL,随着IL增大而增大。 实际上,对两阶系统来说,为了得到足够的phase margin,次主极点需要在ωu之外,并且距离ωu足够远。从这个角度来说,重负载的稳定性补偿会更加困难。
此时,为了简化表达式,认为CLRoeq

神奇地发现左半平面零点又抵消了一个极点,系统还是一个双极点系统。主极点和次极点分别为:
p-3dB | IL>>0 =

*此时Cc的极点分裂作用体现了出来。前面说过,IL最大的时候ωu也会最大,容易算出,ωu,max=gm1/Cc。(这里认为B=1,系统为单位增益运放,此时环路增益最大,也是稳定性补偿最恶劣的情况)由前面表达式可以看出,随着电流增大,gmp增大,次极点变高,主极点变低,稳定性变好。*
3. 补偿电容设计
既然两种情况下都可以化简为两阶系统,那么我们就重新统一一下T(s)的表达式,从分子和分母上同时除去左半平面零点部分(1+sCc/gm3):

这么做的原因主要是希望从全负载范围里找出phase margin (PM)最差的点,在电路设计上保证稳定性。phase margin通常由ωu和次主极点决定:

再用FPM表示次极点和ωu的比例,比例越大越稳定:

这里,ADC是指低频环路增益。依然令B=1,将FPM展开:

其中,只有gmp随负载电流变化而变化。那么,将FPM对gmp求导,令导数等于0,可以得到FPM和PM的最小值:


最终,得出我们关心的结论,Cc如何取值:

先给出我们可以接受的最小PM,带入等式可以得出Cc。容易看出,C1越小,Cc就可以越小,也就是说,接在N1节点的buffer需要输入电容小,这和我们上篇文章里的目标也是吻合的。
最后,贴两张图表示不同负载下的稳定性(这里不再展开说明):

图三

图四
后记:
把电容接到cascode管源级和第二级输出端的补偿方法并不是这篇文章首次提出。在这之前,已经有很多前辈讲过这种补偿方法。但是,这篇文章是从LDO的角度,给出了电路设计的指导性分析,非常便于大家参考和实践。
另外,笔者最近也看了这种补偿方法起源的几篇文章,之后逐渐整理出来和大家分享。
-
负载
+关注
关注
2文章
578浏览量
34527 -
ldo
+关注
关注
35文章
1955浏览量
154112 -
运放
+关注
关注
47文章
1175浏览量
53329 -
Cascode
+关注
关注
0文章
3浏览量
6967 -
LDO电路
+关注
关注
0文章
26浏览量
2490
发布评论请先 登录
相关推荐
为什么运放和ADC的PSRR不能把LDO输出的内部噪声抑制的干干净净呢?
为什么运放和ADC的PSRR不能把LDO输出的内部噪声抑制的干干净净呢?
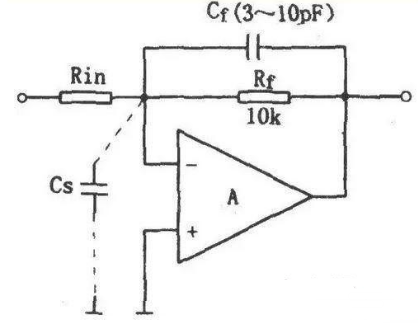
超基础知识点:模拟技术之运放补偿电容问题
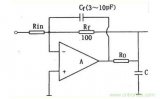
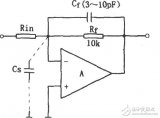
运放补偿电容





 工商网监
工商网监
评论