 机器人坐标系管理TF跟随功能解析
机器人坐标系管理TF跟随功能解析
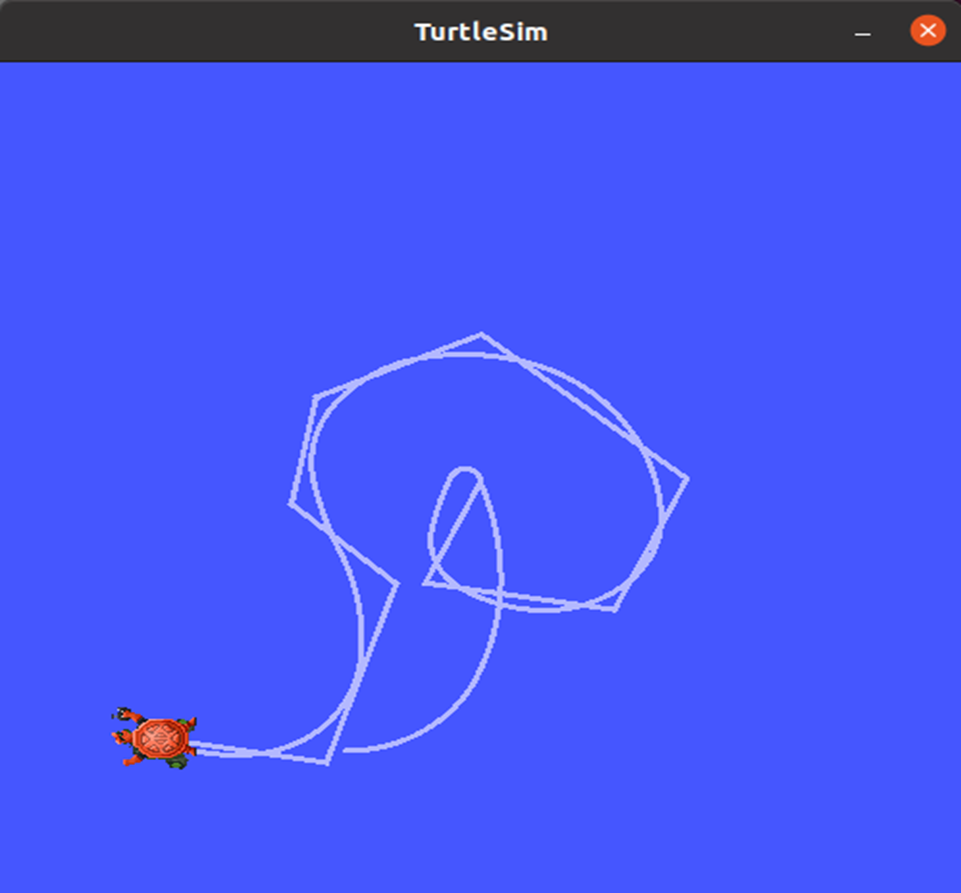
海龟跟随功能解析
运行效果
先看下实现的效果,启动终端后,通过如下命令启动例程:
** ros2 launch learning_tf turtle_following_demo.launch.py** ros2 run turtlesim turtle_teleop_key
看到的效果和ROS自带的例程相同。
原理解析

在两只海龟的仿真器中,我们可以定义三个坐标系,比如仿真器的全局参考系叫做world,turtle1和turtle2坐标系在两只海龟的中心点,这样,turtle1和world坐标系的相对位置,就可以表示海龟1的位置,海龟2也同理。
要实现海龟2向海龟1运动,我们在两者中间做一个连线,再加一个箭头,怎么样,是不是有想起高中时学习的向量计算?我们说坐标变换的描述方法就是向量,所以在这个跟随例程中,用TF就可以很好的解决。
向量的长度表示距离,方向表示角度,有了距离和角度,我们随便设置一个时间,不就可以计算得到速度了么,然后就是速度话题的封装和发布,海龟2也就可以动起来了。
所以这个例程的核心就是通过坐标系实现向量的计算,两只海龟还会不断运动,这个向量也得按照某一个周期计算,这就得用上TF的动态广播与监听了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208913 -
坐标系
+关注
关注
0文章
29浏览量
7371 -
ROS
+关注
关注
1文章
281浏览量
17141
发布评论请先 登录
相关推荐
abb机器人工具坐标系问题
各位大佬请教一下,abb机器人工具坐标系用四点法,六点法,手动输入等方式标定出的工具坐标系的Z方向与实际工具的长度不符,实际工具长度越长坐标系z方向的差距越大。比如实际工具400mm
发表于 08-07 11:11
介绍坐标系和机器人之间的纽带即连杆坐标系
介绍坐标系以及它们之间的变换关系,数学的意味还是很浓的。讲了那么多的公式和规律,它们要怎么用在机器人上呢?这篇文章将介绍坐标系和机器人之间的纽带即连杆
发表于 09-01 06:17
机器人基坐标系标定方法研究
针对借助激光跟踪仪标定机器人所涉及的坐标系统一问题,对基于空间几何法拟合建立的基坐标系与机器人理论基坐标系的转换关系进行了研究,提出了一种基
发表于 03-07 10:43
•2次下载
机器人4大坐标系讲解
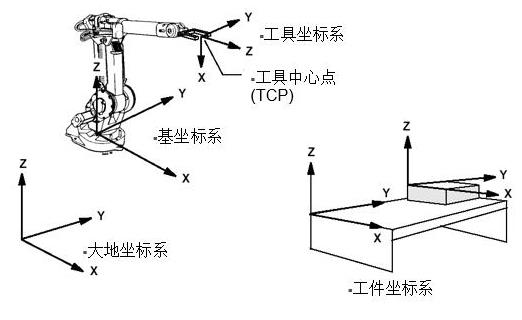
任何机器人都离不开基坐标系,也是机器人TCP在三维空间运动空间所必须的基本坐标系(面对机器人前后:X轴 ,左右:Y轴, 上下:Z轴)。
机器人坐标系用法和算法原理
一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基
发表于 05-11 15:57
•2038次阅读

机器人坐标系选择指令和操作步骤
在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
发表于 05-12 14:43
•2297次阅读

世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个

焊接机器人坐标系有哪几种
焊接机器人是一种自动化设备,用于进行焊接操作。为了确保焊接过程的准确性和效率,焊接机器人需要在三维空间中进行定位和控制。这涉及到使用不同的坐标系,以便机器人能够精确地执行任务。本文


机器人中都有哪些坐标系
坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何

机器人坐标系Launch文件解析
Launch文件解析 先来看下刚才运行的launch文件,里边启动了四个节点,分别是: 小海龟仿真器 海龟1的坐标系广播 海龟2的坐标系广播 海龟跟随控制 其中,两个





 工商网监
工商网监
评论