 硅光电倍增管用于直接飞行时间测距应用(一):直接ToF测距系统的设计
硅光电倍增管用于直接飞行时间测距应用(一):直接ToF测距系统的设计
本白皮书旨在协助开发基于硅光电倍增管(SiPM)的激光雷达(LiDAR,光探测和测距)系统。下面的章节包含了以下信息:直接飞行时间(ToF)测距仪的激光器、计时和光学参数的设计和实现,以及详细分析将SiPM整合到此类系统中时必须考虑的关键方面。
前言
LiDAR是一种测距技术,正越来越多地用于移动测距、汽车ADAS(先进驾驶辅助系统)、手势识别和3D绘图等应用。与雪崩光电二极管(APD)、PIN二极管和PMT等替代性传感器技术相比,采用硅光电倍增管(SiPM)作为光敏传感器有许多优势,特别是对于移动和大批量产品而言。
安森美(onsemi)的SiPM提供:
从250纳米到1100纳米的单光子探测
低电压——易于实现系统要求
低功耗——较低的工作电压和简单的读出电子装置实现低功耗设计
高带宽和快速响应时间——最小化测距时间
能够利用低激光功耗直接ToF测距技术的优势
低噪声和高增益——可实现好的信噪比(SNR)
标准CMOS制造工艺——成本低,高度一致性,可扩展生产
小尺寸SMT封装——可提供1毫米的传感器
与其他传感器相比,迁移到SiPM传感器技术会带来一系列不同的限制。本白皮书旨在帮助用户充分利用该技术的优势,并尽快实现采用SiPM传感器的工作设置。
为此,安森美创建了三个工具来帮助用户;一个用于仿真的MATLAB测距模型,一个测距演示器硬件装置,以及本文文件。
我们创建了一个直接ToF系统的详细MATLAB模型,以便于仿真基于SiPM的测距应用。该模型可用于支持测距系统的设计,并可进行修改以仿真各种应用和实施。
一个基于SiPM的LiDAR演示系统已建成。对这个“第一代”系统进行了测量,并用于验证MATLAB模型的仿真结果。
本文文件旨在帮助新用户开发基于SiPM的直接ToF测距系统。它讨论了各种系统和环境因素对所产生的信噪比的影响。
直接ToF测距系统的设计
一个直接的ToF测距系统所需的基本组件,如图1所示
- 一个带有准直光学系统的脉波激光器
- 一个带有检测光学组件的传感器
- 计时和数据处理电子装置

图1. 直接ToF测距技术概览
本文档聚焦激光器、传感器、读出器和应用环境的系统设计。本白皮书中的单点、直接ToF基线工作可以扩展到更复杂的扫描和成像系统。在直接ToF技术中,一个周期性的激光脉波被指向目标,通常采用对眼睛安全的红外区功率和波长。
目标扩散并反射激光光子,一些光子被反射回传感器。传感器将检测到的激光光子(和一些由于噪声而检测到的光子)转换为电讯号,然后由计时电子装置进行时间标记。这个飞行时间t,可用来计算到目标的距离D,计算公式D=ct/2,其中c=光速,t=飞行时间。传感器必须将返回的激光光子从噪声(环境光)中区分出来。每个激光脉波至少捕获一个时间标记。这称为单次测量。
结合许多单次测量的数据以产生一个测量值,信噪比可以得到极大的改善,从中可提取出检测到的激光脉波计时,具有高精度。有几种不同的读出技术可从检测到的激光光子脉波中获取计时信息,总结如下:
测距读出技术
LED(前缘识别)——涉及对多光子讯号的上升沿的检测。计时的准确性是由辨别返回的光讯号的上升沿的能力决定的。这种技术不受激光脉波宽度的影响。
全波形数字化——全波形被数字化,可以过采样以提高精度。对于短激光脉波或高重复率源来说,可能难以实现。
TCSPC(时间相关的单光子计数)——提供最高的精度和最大的环境光抑制。这种技术要求每个激光脉波检测不到一个讯号光子。这种技术可以不受环境光的影响,但需要短脉波时间、高重复率和快速计时电子装置,以实现快速和准确的测量。
SPSD(单光子同步检测)——TCSPC的一种形式,提供高环境光抑制。必须设计电子装置来处理范围模糊的问题。
建模一个直接ToF测距系统
我们创建了一个直接ToF系统的MATLAB模型。该模型的框图如图2所示。该模型给定一组与表1中所示相似的系统参数,目的是预测系统的整体性能。第一步包括分析计算传感器的光照度(包括环境光和激光),给定一个选定的光学场景,可以通过改变相应的系统参数来改变。通过比较计算出的光照度与传感器的饱和极限,可以验证所选择的设置是否适合测距。在特定设置不适合测距的情况下,可以通过改变系统参数来评估设置本身的改进。
该模型的第二部分包括一个Monte Carlo 仿真器,其中传感器的随机特性,主要是光子探测效率(PDE)和时间抖动,被再现。这一步允许通过仿真获得传感器的现实输出。与分析部分相比,这一步考虑到了计时信息,如采集时间、激光的重复率和激光脉波宽度。Monte Carlo 仿真的结果被传递给一个读出模型,通常是一个鉴别器,然后是一个TDC(时间到数字转换器),它产生一个时间戳的柱状图,从中可以提取一个范围测量。

图2. 光照度的计算结合Monte Carlo仿真器,从而可以再现完整的系统输出。

表1. SiPM直接ToF测距系统中的变量
测距直方图
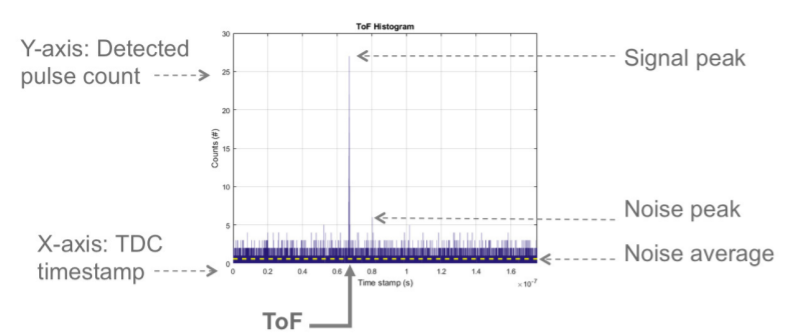
每次发出激光脉波时,采集系统都会进行一次单次测量。取决于许多因素,包括激光功率和与目标的距离,每个脉波检测到的激光光子数量可能很低。理想情况下,每个检测到的光子都会用时间标记。但每个单次测量的时间标记数量可能受到TDC死区时间的限制。通常情况下,许多单次测量的时间,各包含一个或多个时间标记,结合起来可产生一帧。在一帧过程中获得的完整计时数据可以以直方图的形式绘制出来,如图3所示。
系统测距性能受到直方图数据质量的限制,而直方图又受到系统参数的影响。从第7页“改变系统变量的影响”一节中详述的系统参数分析中可以看出,有一些限制因素和一些可以作出的取舍。下面使用的测距直方图也提供了一个直观的表示,这对于描述各种参数对所采集数据的影响是很有用的。基本直方图讯号和计时参数说明如下。
直方图的信噪比,SNRH,是讯号峰值与最大噪声峰值之比。SNRH = 讯号峰值/噪声峰值。
在模型中,以下术语适用于测量时间:f = 激光频率。
激光重复率限制了可以测量的最大ToF,无失真,这定义了每次单次测量的时间。
单次测量时间,tss = 1/f。
帧大小是指每张直方图的单次测量数。较大的帧大小可以提高SNRH,产生更好质量的直方图。测距速度由帧率定义:帧率=每秒测距次数 = 1/ tacq
图3. 显示讯号、噪声和飞行时间的仿真直方图实例
- 审核编辑 黄宇
-
激光雷达
+关注
关注
968文章
3964浏览量
189804 -
TOF
+关注
关注
9文章
481浏览量
36328 -
SiPM
+关注
关注
1文章
17浏览量
9000 -
LIDAR
+关注
关注
10文章
325浏览量
29409
发布评论请先 登录
相关推荐
集成时间数字转换器简化了飞行时间测距应用的设计

激光测距传感器输出什么信号
光电倍增管接一个电阻与直接接跨阻放大器之间有区别吗?
TDC7201适用于激光雷达、测距仪和ADAS中飞行时间应用的时间-数字转换器数据表

光电倍增管在激光测距中的应用
直接飞行时间(dToF) SiPM LiDAR 平台SECO-测距仪-GEVK数据手册

混合ToF弥补单一ToF不足实现全面深度传感
意法半导体推出新一代8 x 8多区飞行时间测距传感器VL53L8CX






 工商网监
工商网监
评论