 TogetherROS Bot相机驱动方法
TogetherROS Bot相机驱动方法
TogetherROS™·Bot相机驱动
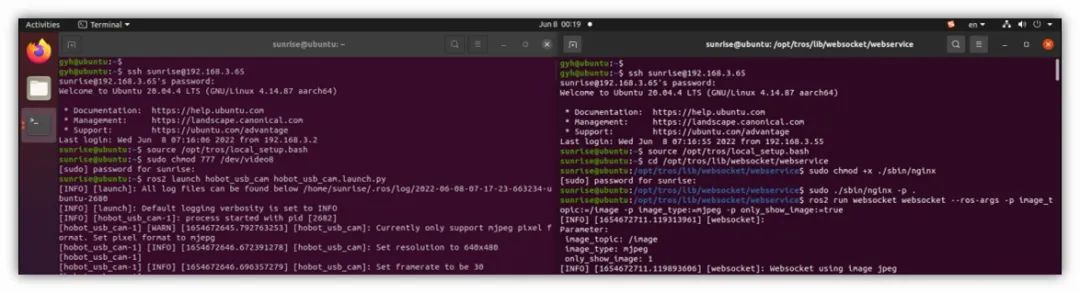
除此之外,TogetherROS™·Bot中也提供了USB摄像头的驱动节点,连接摄像头之后,直接设置设备的权限和TogetherROS的环境变量就可以使用了。
$ source /opt/tros/local_setup.bash
$ sudo chmod 777 /dev/video8
$ ros2 launch hobot_usb_cam hobot_usb_cam.launch.py
之后可以再打开一个新的终端,输入对应的指令,然后启动websocket这个节点,就可以把image这个话题的数据发送到网页了。
$ source /opt/tros/local_setup.bash
$ cd /opt/tros/lib/websocket/webservice
$ sudo chmod +x ./sbin/nginx
$ sudo ./sbin/nginx -p .
$ ros2 run websocket websocket --ros-args -p image_topic:=/image -p image_type:=mjpeg -p only_show_image:=true
这时我们直接打开在通一个局域网下的浏览器,输入X3Pi的地址,就可以进去到一个网页,点击左上方web端展示即可看到USB摄像头的实时画面。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28511浏览量
207495 -
usb
+关注
关注
60文章
7959浏览量
265061 -
驱动
+关注
关注
12文章
1844浏览量
85357 -
相机
+关注
关注
4文章
1358浏览量
53706
发布评论请先 登录
相关推荐
K-Bot版本4机器人的设计教程
描述机器人k-bot v.4-pcb01电源K-Bot版本4机器人的设计理念是,任何人都可以使用教育机器人进行组装、编程和教学活动。主要是为了让任何教育水平的老师都能在课堂上和学生一起使用它
发表于 08-22 07:43
索尼 全系列数码相机USB驱动下载
索尼 全系列数码相机USB驱动下载:产品发布了一款整合USB驱动包,几乎支持索尼全部型号的数码相机,真是极大的方便了SONY数码相机的用户,
发表于 01-06 16:05
•39次下载
BOT项目公司的十大特质
目前,国际BOT投融资方式在世界各国积极开展,有力地推动了国际资本的全球性流动,同时也促进了接受投资的东道国公共基础设施的建设。我国现在也非常重视BOT方式的具体适
发表于 01-08 15:54
•3次下载
索尼 DSC系列数码相机USB驱动下载
索尼 DSC系列数码相机USB驱动下载
索尼DSC系列数码相机USB驱动程序,正确安装之后,一旦你的数码相机通过USB连线与系统相连,
发表于 03-10 13:32
•35次下载
bot护理机器人
在上一次迭代后的六年半,弗劳恩霍夫研究所发布了CARE-O-BOT的更新。为个人和专业使用的负担得起的服务机器人已经使它更灵活,更模块化,更个性化让科幻幻想更贴近现实。
发表于 04-30 20:11
•6127次阅读
“导游Bot”在模拟的纽约市中导航定位,使用自然语言跟“游客Bot”交流
研究人员表示,Talk the Walk是首个将所有三个要素结合在一起的任务:感知(游客Bot观察世)、行为(游客Bot在环境中导航),以及语言交互达成目标(导游Bot为游客Bot提供
企业运行BOT模式,物联网已变得越来越重要
在企业运行“建设-经营-转让”(BOT:Build Operate Transfer model,下文统称为BOT)的开发模型时,物联网变得越来越重要。

Android Studio引入AI编程助手Studio Bot
谷歌在昨晚的 Google I/O 2023 大会上发布了用于 Android Studio 的 AI 编程助手 Studio Bot—— 支持生成代码和修复错误。Studio Bot 目前处于预览阶段,已集成到 Android Studio Hedgehog。

TogetherROS系统的通信功能测试
通信测试 先来测试一下TogetherROS™·Bot系统的通信功能。 我们需要启动两个终端,分别连接到旭日X3派上,并分别按以下命令配置环境变量。 终端1: ** source /opt/tros
TogetherROS目标检测运行方法
接下来,我们就运行一个更为直观的案例——目标检测。 在这个案例中,需要大家找一个USB的相机,连接到旭日X3拍的USB接口上。 在运行这个例程之前,需要确认两点: 1.有一个USB相机已经连接





 工商网监
工商网监
评论