 全局路径规划RRT算法原理
全局路径规划RRT算法原理
无人驾驶路径规划
众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。
路径规划是感知和控制之间的决策阶段,主要目的是考虑到车辆动力学、机动能力以及相应规则和道路边界条件下,为车辆提供通往目的地的安全和无碰撞的路径。
路径规划问题可以分为两个方面:
(一)全局路径规划:全局路径规划算法属于静态规划算法,根据已有的地图信息(SLAM)为基础进行路径规划,寻找一条从起点到目标点的最优路径。
通常全局路径规划的实现包括Dijikstra算法,A*算法,RRT算法等经典算法,也包括蚁群算法、遗传算法等智能算法;
(二)局部路径规划:局部路径规划属于动态规划算法,是无人驾驶汽车根据自身传感器感知周围环境,规划处一条车辆安全行驶所需的路线,常应用于超车,避障等情景。通常局部路径规划的实现包括动态窗口算法(DWA),人工势场算法,贝塞尔曲线算法等,也有学者提出神经网络等智能算法。
本系列就从无人驾驶路径规划的这两方面进行展开,对一些经典的算法原理进行介绍,并根据个人的一些理解和想法提出了一些改进的意见,通过Matlab2019对算法进行了仿真和验证。过程中如果有错误的地方,欢迎在评论区留言讨论,如有侵权请及时联系。
那么废话不多说,直接进入第一部分的介绍,全局路径规划算法-RRT算法。
全局路径规划 - RRT算法原理
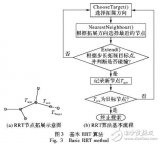
RRT算法,即快速随机树算法(Rapid Random Tree),是LaValle在1998年首次提出的一种高效的路径规划算法。RRT算法以初始的一个根节点,通过随机采样的方法在空间搜索,然后添加一个又一个的叶节点来不断扩展随机树。
当目标点进入随机树里面后,随机树扩展立即停止,此时能找到一条从起始点到目标点的路径。算法的计算过程如下:
step1:初始化随机树。将环境中起点作为随机树搜索的起点,此时树中只包含一个节点即根节点;
stpe2:在环境中随机采样。在环境中随机产生一个点,若该点不在障碍物范围内则计算随机树中所有节点到的欧式距离,并找到距离最近的节点,若在障碍物范围内则重新生成并重复该过程直至找到;
stpe3:生成新节点。在和连线方向,由指向固定生长距离生成一个新的节点,并判断该节点是否在障碍物范围内,若不在障碍物范围内则将添加到随机树 中,否则的话返回step2重新对环境进行随机采样;
step4:停止搜索。当和目标点之间的距离小于设定的阈值时,则代表随机树已经到达了目标点,将作为最后一个路径节点加入到随机树中,算法结束并得到所规划的路径 。
RRT算法由于其随机采样及概率完备性的特点,使得其具有如下优势:
(1)不需要对环境具体建模,有很强空间搜索能力;
(2)路径规划速度快;
(3)可以很好解决复杂环境下的路径规划问题。
但同样是因为随机性,RRT算法也存在很多不足的方面:
(1)随机性强,搜索没有目标性,冗余点多,且每次规划产生的路径都不一样,均不一是最优路径;
(2)可能出现计算复杂、所需的时间过长、易于陷入死区的问题;
(3)由于树的扩展是节点之间相连,使得最终生成的路径不平滑;
(4)不适合动态环境,当环境中出现动态障碍物时,RRT算法无法进行有效的检测;
(5)对于狭长地形,可能无法规划出路径。
-
RTT
+关注
关注
0文章
66浏览量
17349 -
路径规划
+关注
关注
0文章
78浏览量
15371 -
无人驾驶
+关注
关注
98文章
4114浏览量
121944 -
RRT
+关注
关注
0文章
12浏览量
1148
发布评论请先 登录
相关推荐
为ROS navigation功能包添加自定义的全局路径规划器(Global Path Planner)
基于路径跟踪方法的路径规划算法
双足机器人路径规划算法
机器人路径规划算法,全局路径规划与局部路径规划究竟有哪些区别
由人工势场引导RRT进行路径规划的方法

一文解读无人驾驶全局路径规划 - RRT算法原理

自动驾驶 RRT算法原理解析

机器人路径基于采样的规划
多台仓储AGV协作全局路径规划算法的研究






 工商网监
工商网监
评论