 DDS为ROS的通信系统提供了哪些特性
DDS为ROS的通信系统提供了哪些特性
质量服务策略QoS
DDS为ROS的通信系统提供了哪些特性呢?我们通过这个通信模型图来看下。
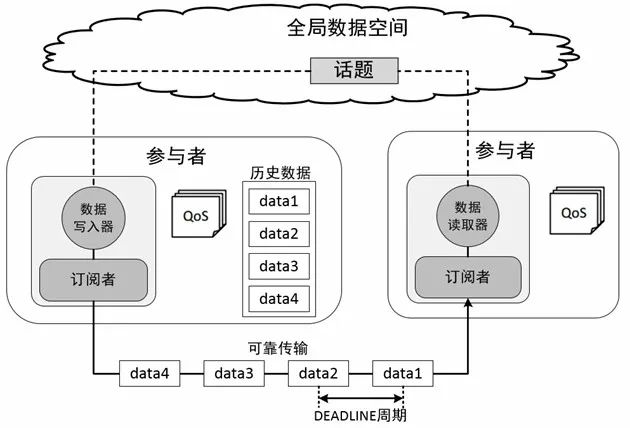
DDS中的基本结构是Domain,Domain将各个应用程序绑定在一起进行通信,回忆下之前我们配置树莓派和电脑通信的时候,配置的那个DOMAIN ID,就是对全局数据空间的分组定义,只有处于同一个DOMAIN小组中的节点才能互相通信。这样可以避免无用数据占用的资源。
DDS中另外一个重要特性就是质量服务策略,QoS。
QoS是一种网络传输策略,应用程序指定所需要的网络传输质量行为,QoS服务实现这种行为要求,尽可能地满足客户对通信质量的需求,可以理解为数据提供者和接收者之间的合约。
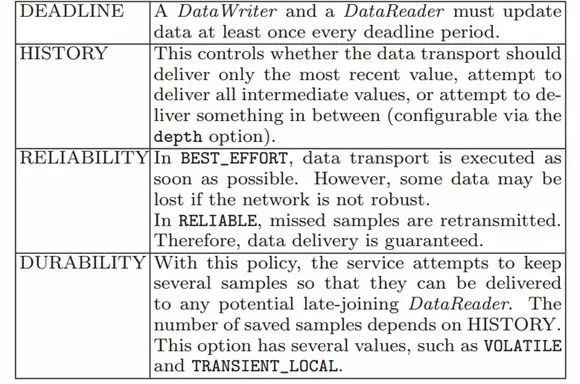
具体会有哪些策略?比如:
DEADLINE策略,表示通信数据必须要在每次截止时间内完成一次通信;
HISTORY策略,表示针对历史数据的一个缓存大小;
RELIABILITY策略,表示数据通信的模式,配置成BEST_EFFORT,就是尽力传输模式,网络情况不好的时候,也要保证数据流畅,此时可能会导致数据丢失,配置成RELIABLE,就是可信赖模式,可以在通信中尽量保证图像的完整性,我们可以根据应用功能场景选择合适的通信模式;
DURABILITY策略,可以配置针对晚加入的节点,也保证有一定的历史数据发送过去,可以让新节点快速适应系统。
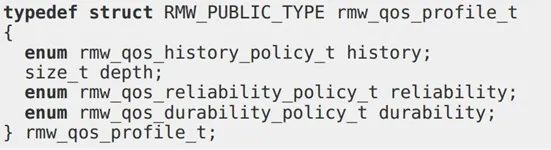
所有这些策略在ROS系统中都可以通过类似这样的结构体配置,如果不配置的话,系统也会使用默认的参数。
举一个机器人的例子便于大家理解。
比如我们遥控一个无人机航拍,如果网络情况不好的话,遥控器向无人机发送运动指令的过程,可以用reliable通信模式,保证每一个命令都可以顺利发送给无人机,但是可能会有一些延时,无人机传输图像的过程可以用best effort模式,保证视频的流畅性,但是可能会有掉帧。
如果此时出现一个黑客黑入我们的网络,也没有关系,我们可以给ROS2的通信数据进行加密,黑客也没有办法直接控制无人机。
DDS的加入,让ROS2的通信系统焕然一新,多众多样的通信配置,可以更好的满足不同场景下的机器人应用。
-
机器人
+关注
关注
211文章
28414浏览量
207055 -
通信
+关注
关注
18文章
6032浏览量
135985 -
DDS
+关注
关注
21文章
634浏览量
152651 -
ROS
+关注
关注
1文章
278浏览量
17007
发布评论请先 登录
相关推荐
ROS系统是什么?ROS系统主要特点有哪些?创龙RK3568J+Debian的ROS2系统案例

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
基于串口的STM32通过rosserial和ROS系统通信的代码
如何在ROS上使用serial包进行串口通信
RT-Thread实时操作系统与ROS2是怎样进行通信的
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
最新RX65N微控制器,可以支持ROS 2的DDS
ROS与STM32通信

ROS1的通信架构的基础通信方式及相关概念


ros1和ros2的通信模型






 工商网监
工商网监
评论