 1030 nm单光子探测激光雷达技术研究
1030 nm单光子探测激光雷达技术研究
1 μm波段单光子探测激光雷达因大气透过率高、背景噪声低、红外隐蔽性好、激光脉冲能量高,在远距离激光测距和成像方向极具发展前景。然而,传统的1064 nm激光器缺少对应的高性能的单光子探测器,成为1 μm波段单光子探测激光雷达的发展瓶颈。盖革Si APD单光子探测器(SiSPAD)具有优异的探测性能,但是其在1064 nm波长的探测效率极低。
据麦姆斯咨询报道,近期,华东师范大学精密光谱科学与技术国家重点实验室的科研团队在《激光与红外》期刊上发表了以“1030 nm单光子探测激光雷达技术”为主题的文章。该文章第一作者为杨函霖,主要从事近红外单光子测距与成像技术方面的研究工作;通讯作者为吴光研究员,主要从事低噪声高速单光子探测技术方面的研究工作。
针对这个激光器与探测器的矛盾,本文研究1030 nm波长单光子探测激光雷达技术,SiSPAD在1030 nm的探测效率是1064 nm的2.9倍,相同条件的单光子探测激光雷达探测距离提升67.8%。另外,本文搭建双棱镜光束扫描装置,演示了1030 nm波长的单光子三维成像。
SiSPAD在1 μm波段探测效率
SPAD的探测概率由量子效率和光生载流子触发雪崩电流概率组成。量子效率指入射光子被APD吸收层的半导体材料吸收后产生光生载流子的概率,其中最主要的吸收形式为本征吸收。半导体材料对不同波长入射光子的本征吸收强度不同,导致SPAD的探测效率存在差异。在1 μm波段,Si的本征吸收强度随波长增大而降低。本文首先测量SiSPAD在1 μm波段的探测效率,从而分析比较1030 nm与1064 nm两种波长单光子探测激光雷达的性能差异。
本文采用德国Laser Components公司的Si APD器件(Sap500),发展主动抑制电路,研制成SiSPAD,所测探测效率与其他同类产品存在绝对数值上的差异,但探测效率随波长的变化趋势是一致的。在暗室中对SiSPAD探测效率标定结果如图1所示。从标定结果可见,SiSPAD在1 μm附近的探测效率随波长增长而快速下降,其在1064 nm波长的探测效率仅1.1%,而在1030 nm波长的探测效率达到3.2%,两者存在约2.9倍差异。
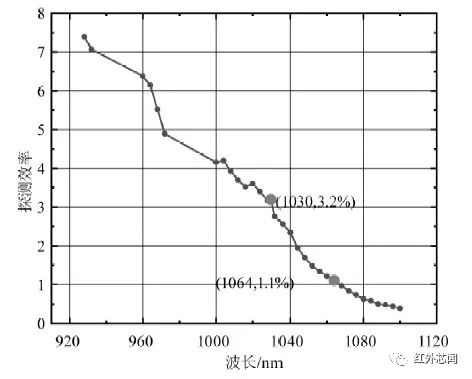
图1 SiSPAD探测效率标定结果
使用雷达方程来计算探测效率差距对测距能力的影响。1030 nm激光雷达的探测距离比1064 nm激光雷达高出约67.8%,更高的探测距离意味着更大的应用潜力。另一方面,激光光源的性能也与探测距离密切相关。现主流的1064 nm单光子探测激光雷达多使用Nd:YAG激光器作为光源,该激光器技术成熟且应用广泛。相比之下,虽然使用Yb:YAG晶体的1030 nm激光器相关研究较少,但该晶体拥有量子效率高、能级结构简单、无激发态吸收和上转换作用、无浓度猝灭现象,高吸收带宽等独特优势。已经有许多高性能的1030 nm激光器产品相继推出,解决了1030 nm单光子探测激光雷达的光源问题。虽然1064 nm激光器输出功率高于1030 nm激光器,但对于汽车自动驾驶、地形测绘等需要符合人眼安全条件的应用领域,现有1030 nm激光器已满足功率要求。
单光子探测激光雷达实验设计
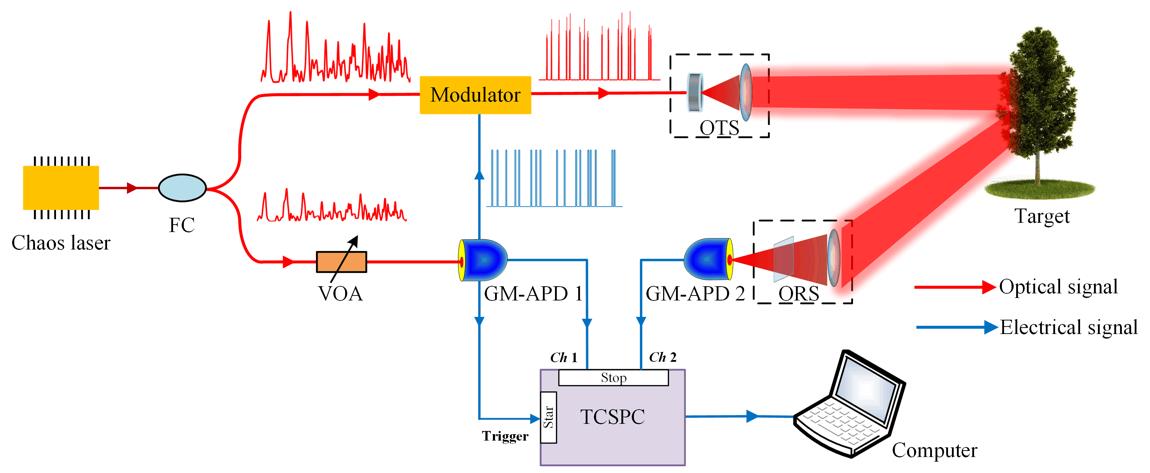
图2为单光子探测激光雷达系统示意图。实验中使用的1030 nm固态激光器输出脉宽为1.5 ns、重复频率为1.5 kHz,输出光束的直径为1.1 mm、发散角为1.2 mrad、单脉冲能量最大可调至100 μJ。1064 nm激光器的输出脉宽为2.2 ns、重复频率为1 kHz、光束的直径为1 mm,发散角为3.5 mrad,单脉冲能量0.5 μJ。两波长激光器可以拆卸替换,便于开展两个波长的单光子测距对比实验。出射光束经过组合滤光片衰减后,由有机玻璃板进行分光(分光比为3.7:96.2),其中反射光束进入PIN光电二极管产生同步信号,透射光束穿过50 mm直径的打孔反射镜(打孔孔径10 mm)后出射。扫描装置采用双棱镜设计,由一对直径25.4 mm、顶角18.2°的楔形棱镜组成,并使用两个金属传感器反馈棱镜的旋转角度。1030 nm窄带滤光片用于抑制背景噪声。同步信号、金属传感器两路方位角信号、SPAD总共4路信号输入到TCSPC系统中记录。
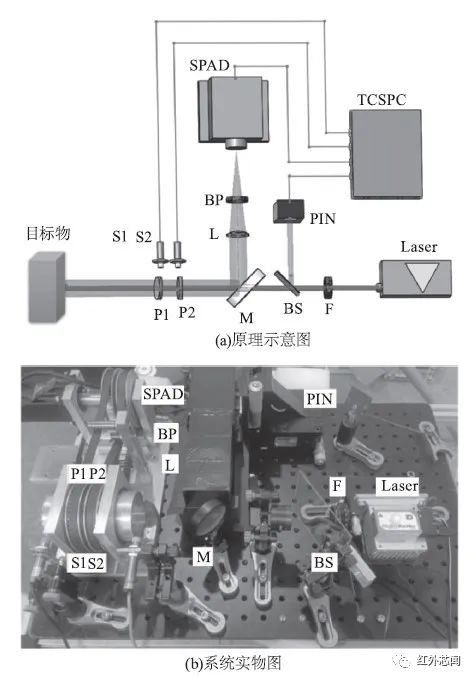
图2 单光子探测激光雷达系统
1030 nm / 1064 nm单光子测距对比
本文分别开展1030 nm和1064 nm波长的单光子测距实验,以验证两个波长探测效率差异对单光子测距能力的影响。按照图2原理图搭建单光子探测激光雷达,固定双棱镜的方位角使激光光束方向恒定,并通过改变滤光片调节脉冲强度,将两个光源调整到单脉冲能量基本一致。同时确保探测器计数保持在平均每脉冲0.1个光子以下,以规避多光子计数的影响。经过测试,光路中打孔反射镜、耦合透镜等其他光学原件在两波长处的光学损耗差异可以忽略不计。每个波长均测试5次,单次累计时间t=20 s,测距目标为实验室走廊后面60 m远的白色墙壁,图3展示了其中两次测量的结果。
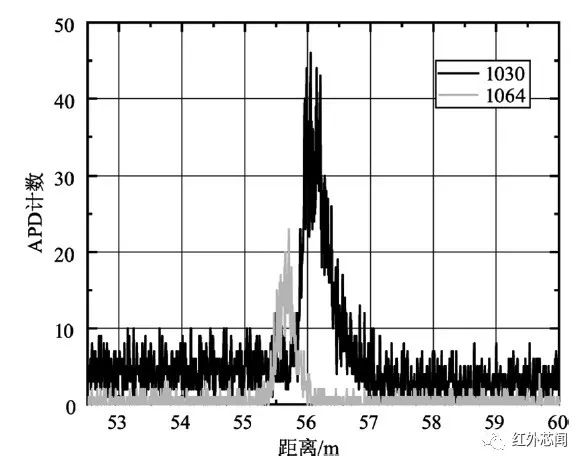
图3 1030 nm / 1064 nm测距结果
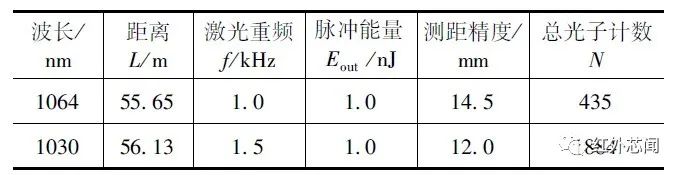
图3中1030 nm测距得到的信号峰在高度上明显超过1064 nm。因为1030 nm激光器功率比1064 nm激光器更大,其初始出射光束被滤光片反射回来并散射到周围后会对探测器产生干扰,所以两波长的噪声强度存在差异。本文在后续分析中先做了去底噪处理。两个波长测距时雷达系统的位置有一些变动,导致测距结果不一致。该差异在后续计算中已经代入,不影响验证比对。使用Matlab对两个波长的测距结果进行积分,得到信号峰内回波信号的总和,结果如表1所示。
表1 相关参数和测距结果
单光子三维成像实验
扫描装置的性能高低是影响雷达光束在空间上指向精确与否的关键性因素。声光、电光偏转器等非机械性的扫描装置会引发光电效应等现象,因此存在通光孔径偏小和光束传输质量较差等问题。机械性扫描装置包括以旋转电机为代表的云台法、以振镜为代表的反射法和以楔形棱镜为代表的折射法。其中云台法大都体积笨重,无法高精度且快速的扫描;反射法因镜子角度改变量与光束偏转角度为2倍关系,在机械误差上更为敏感,面对机械震动等外界因素时抗干扰能力不足。与上述方法相比,双棱镜结构更为紧密、响应速度快、抗干扰能力更强,在复杂环境的适用性上也更好。
组成扫描装置的一对楔形棱镜安置在金属套筒中。套筒上安装有传动轮,通过传动带与步进电机相连,最高转速10 r/s。步进电机上安装了两个不同齿数的传动轮用于带动双棱镜旋转,其驱动信号由高精度信号发生器给出,双棱镜的方位角信息由棱镜套筒旁的两个金属传感器给出。双棱镜的转动速度由电机转速和各自传动轮齿数比共同决定,通过更换传动轮即可改变扫描轨迹。实验中的齿数比为50:47,扫描轨迹如图4(b)所示。
为进一步减少背景噪声,本文在打孔反射镜到单光子探测器的光路上用吸光材料做了遮蔽处理。配合带宽10 nm的窄带滤光片,背景噪声最终被控制在10 kHz以内。
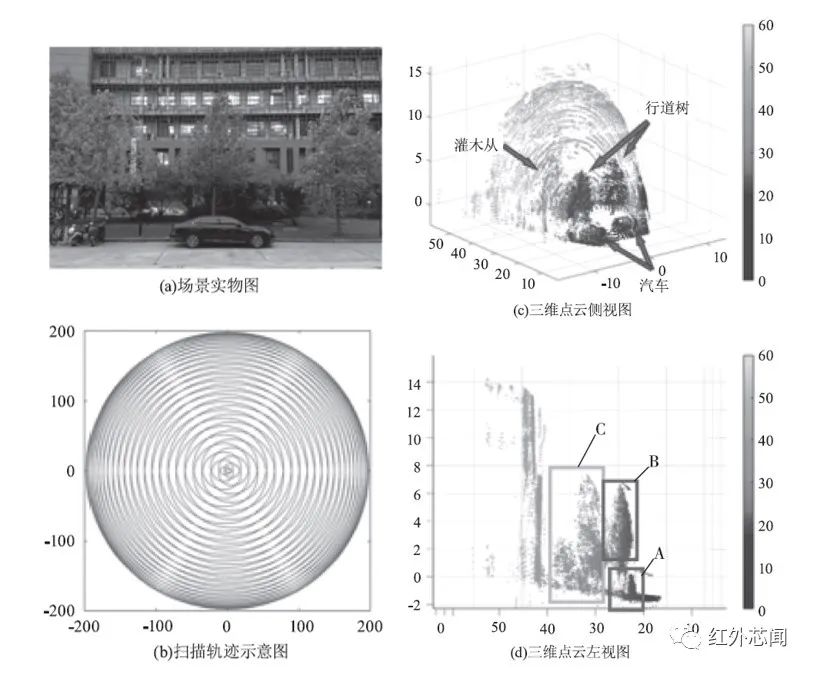
图4 单光子成像点云图
为演示1030 nm单光子探测激光雷达的成像效果,本文在实验室周围选取了一个合适的场景。如图4(a)所示,整体场景可分为3层:距离最近的两辆汽车和两颗行道树、靠中间的灌木丛、以及最外层的办公楼外墙。扫描范围为一个顶角36°的圆锥,从系统到办公楼外墙的距离约50 m,最大扫描半径16 m。本文将连续扫描的轨迹平均划分为若干个像素点,用TCSPC技术处理单个像素点对应时间段内的所有回波信号。在多个脉冲周期累计后,背景噪声接近平均的分布在时间轴上,而与同步信号相关性强的目标信号集中累积在一处,形成计数值远超噪声的信号峰。设定一个比较阈值去噪后对该信号峰提取质心对应的时间T,即可求出该像素点的距离D=cT/2。
尽管在白天使用1030 nm单光子探测激光雷达也能获得目标场景的距离信息,但过高的背景计数会导致系统信噪比过低、运算处理时间过长,所以本章实验在夜间进行。设置扫描时间250 s,电机转速为0.2 r/s,双楔形棱镜分别转动50圈和47圈。每个像素点的累计时间为6.6 ms,扫描轨迹被划分为约38000个像素点。扫描结果如图4(c)、(d)所示。
图中目标场景的重建效果良好。距离约25 m的蓝色点云中,靠上部分为两颗行道树,靠下部分为两辆汽车,在图4(d)中分别“A”框和“B”框标出。第二层灌木丛距离约35 m,用浅蓝灰色点云显示,在图4(d)中用“C”框标出。最后的办公楼外墙距离约50 m,用橙色点云显示其3层结构。汽车和树木的总体轮廓清晰,而办公楼外墙在细节上效果一般。这是因为汽车和树木的表面反射率较高,而办公楼外侧有大量低漫反射率的玻璃窗,导致回波光子数量有差异。同时在双楔形棱镜扫描轨迹划分的像素点中,中心区域的像素点较为密集,而边际区域的像素点分布稀疏,进而造成了外墙部分成像模糊。
结论
本文搭建了一套基于SiSPAD的1030 nm单光子探测激光雷达,采用双棱镜作为扫描装置。从SiSPAD探测效率标定数据的分析和1064 nm / 1030 nm两个波长测距比较实验这两个方面验证,说明1030 nm单光子探测激光雷达能够获得67.8%左右的探测距离提升。另外,本文还演示了50 m范围的近距离三维成像,证明了1030 nm单光子探测激光雷达的可行性。同时,目前已经研发出高性能的1030 nm激光器货架产品,解决了激光光源的问题。相较于传统的近红外激光雷达,这种1030 nm单光子探测激光雷达在未来汽车自动驾驶、地形测绘等方面有很大的应用潜力。
审核编辑:刘清
-
激光器
+关注
关注
17文章
2578浏览量
60953 -
单脉冲
+关注
关注
0文章
27浏览量
12784 -
激光雷达
+关注
关注
969文章
4057浏览量
190842 -
光电二极管
+关注
关注
10文章
406浏览量
36160 -
单光子探测器
+关注
关注
1文章
31浏览量
4512
原文标题:1030 nm单光子探测激光雷达技术
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

使用单光子探测技术设计的数字混沌激光雷达系统

单光子激光雷达:航空遥感技术的革命性突破

激光雷达技术的发展趋势
中科院微电子所在光子集成激光探感技术方面取得进展
光学雷达和激光雷达的区别是什么
基于SPAD单光子相机的LiDAR技术革新

一文看懂激光雷达


机载单光子激光雷达系统用于实现高分辨率3D成像

基于光子-电子集成回路的相干激光雷达引擎设计
什么是单光子探测器
激光雷达的探测技术介绍 机载激光雷达发展历程






 工商网监
工商网监
评论