 开源四轴协作机械臂ultraArm激光雕刻技术案例!
开源四轴协作机械臂ultraArm激光雕刻技术案例!
注意安全事项
开始之前,请确保您已采取适当的安全措施,例如用于激光操作的防护眼镜、灭火器和通风良好的区域。
引言
随着科技的不断进步,激光雕刻技术已经成为当今制造行业中不可或缺的一部分。它以其高精度、高效率和广泛的材料适应性,在众多领域展现出独特的优势。本文将深入探讨激光雕刻的工作原理,以及如何通过一款四轴全金属机械臂来实现精准的雕刻路径跟随。我们将详细解析激光头的发射原理、激光与材料的相互作用,以及机械臂如何通过精确的步进电机控制,配合先进的路径规划软件,来完成从简单图案到复杂设计的精细雕刻。无论是对于工业生产,还是个人创客项目,激光雕刻技术的应用都展现出了无限的可能性。接下来,让我们一起揭开激光雕刻技术的神秘面纱,探索它与机械臂结合的创新应用。
产品
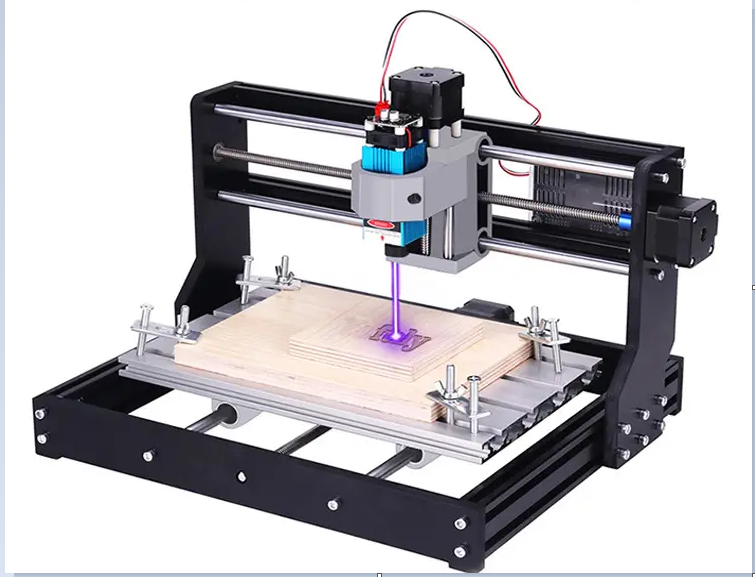
ultraArm P340
ultraArm P340,由Elephant Robotics开发,是一款桌面型的高性能机器人臂,专为教育和自动化领域设计。它具有紧凑的金属结构,仅占用A5纸张大小的空间。配备高效步进电机,ultraArm P340拥有±0.1mm的重复定位精度和高稳定性。作为一款4轴协作机器人,它能够执行雕刻、绘画和抓取等多种任务,适用于多种应用场景。机器人臂搭载Arduino兼容的Mega2560控制板,具备340mm的工作半径,并可配备不同附件以适应各种功能需求。这些特性使得ultraArm P340成为适用于教育和实践的多功能机器人解决方案。

激光雕刻
激光雕刻是一种利用高能量激光束对物质表面进行雕刻的技术。它通过激光器产生的激光束精确地照射到材料表面,利用高热能迅速将材料局部蒸发或熔化,从而在材料表面留下永久性的标记或图案。与传统的机械雕刻方法相比,激光雕刻具有无接触、精度高、速度快和适应性强等优点。激光雕刻是一种利用高能量激光束对物质表面进行雕刻的技术。它通过激光器产生的激光束精确地照射到材料表面,利用高热能迅速将材料局部蒸发或熔化,从而在材料表面留下永久性的标记或图案。与传统的机械雕刻方法相比,激光雕刻具有无接触、精度高、速度快和适应性强等优点。

目前市面上激光雕刻机常见光源主要有CO2光源,光纤光源,紫光光源,绿光光源,二极管光源,其激光波长不同,雕刻效能差异也很大。
我们今天使用到的激光雕刻机是CO2激光雕刻机,主要是和雕刻的材质有木头,皮革,塑料等非金属材料。
激光雕刻的原理
这里是一台大型的CO2激光雕刻机的视频,整个运作的流程。可以借助这个视频了解激光雕刻是怎么工作的。
https://www.youtube.com/watch?v=d5pru79E1ak
CO2激光雕刻机的工作原理主要分为:
激光产生:在CO2激光雕刻机中,激光是通过激发含有二氧化碳的气体混合物来产生的。这个混合物通常还包含氮气、氦气和/或氙气。当电流通过这种气体混合物时,它激发CO2分子,产生激光光。
激光放大和聚焦:产生的激光经过特殊设计的镜子和光学系统进行放大和聚焦。通过聚焦激光,可以将其能量集中在非常小的点上,从而达到高能量密度。
材料加工:聚焦的激光束照射到材料表面,由于激光的高能量,材料在激光作用点会迅速升温,导致材料熔化、蒸发或者通过化学分解去除,从而实现切割或雕刻。
控制系统:激光雕刻机通常配备有计算机控制系统,可以精确控制激光束的位置、移动速度和功率。这允许用户根据需要设计复杂的图案或文字,并精确地在材料上进行雕刻或切割。
冷却系统:由于激光器在工作时会产生热量,因此需要一个冷却系统来维持激光器的适宜工作温度,确保机器的稳定性和效率。
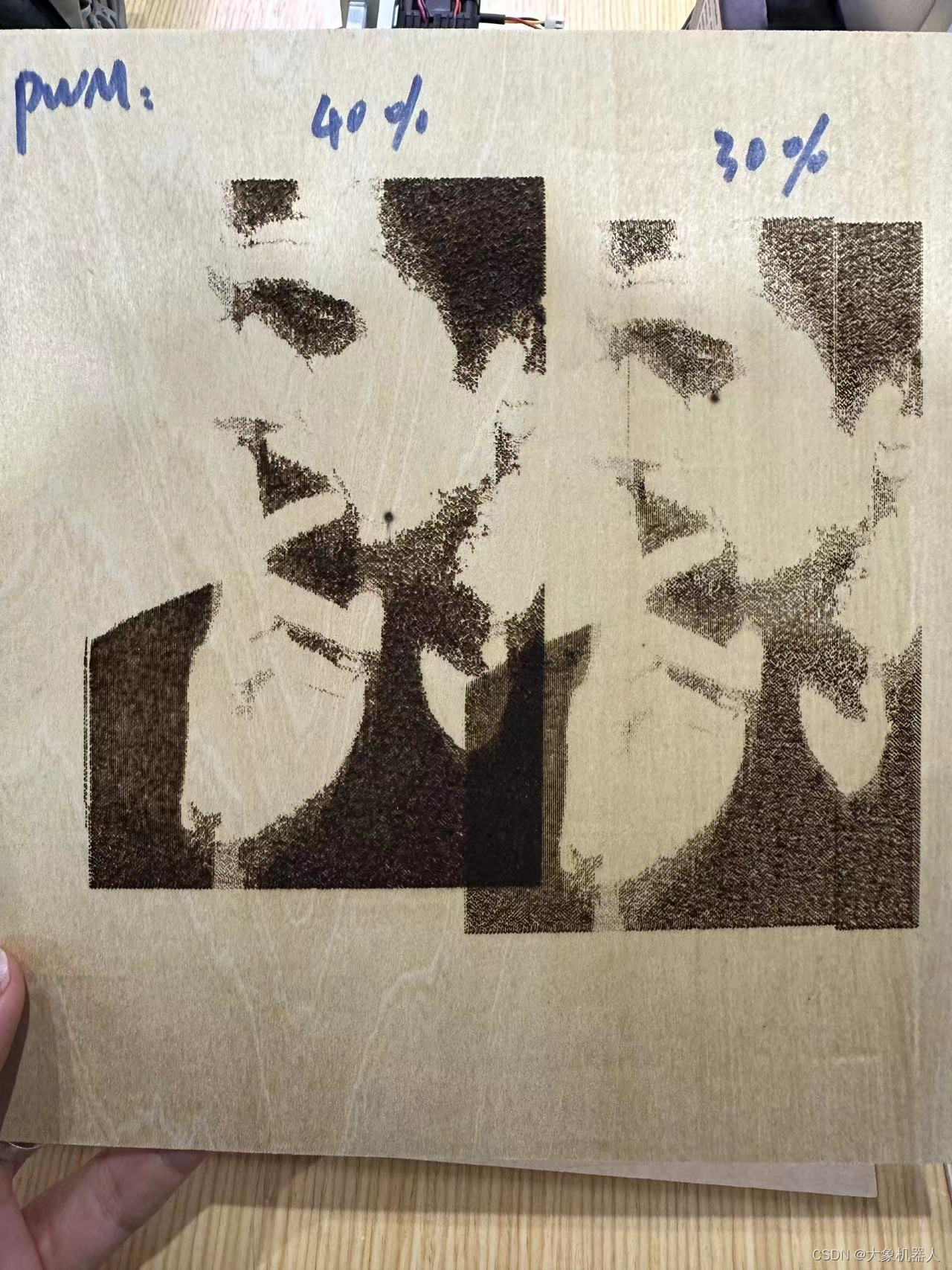
PWM,脉冲宽度调制是用来控制激光的输出功率的,这种技术通过控制激光器发射激光的时间长度来实现功率控制。可以从图片中很明显的得出一个结论,当pwm的百分比越高,嗦雕刻出来的效果就越深。
CO2激光雕刻机
CO2的激光雕刻机已经非常普遍了,随便一搜索就有各式各样的,我们使用的是这一款。



这种雕刻机就很方便,能够通过IO接口来进行控制,可以装配在UltraArm末端。
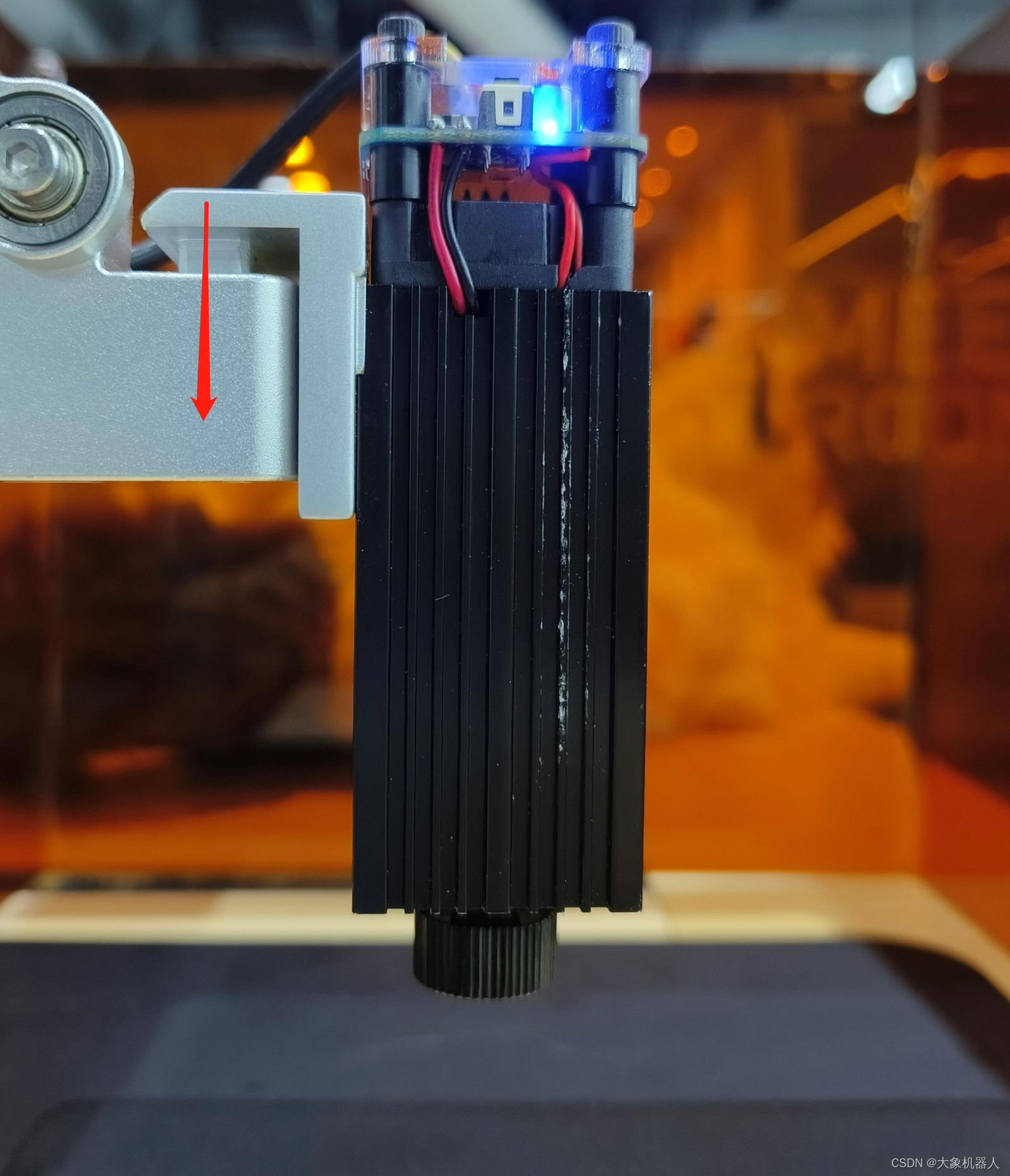
安装在机械臂末端

与机械臂IO口连接

在下方垫上铝合金板,避免下方物被激光射穿
接下来只要根据图案的路径,让机械臂跟随路径就能够进行定制图案的雕刻,也是很关键的一个部分,激光雕刻的控制系统。
Elephant Luban-控制系统
Elephant Luban是一款软件,集成了ultraArm P340的写字画画功能,激光雕刻功能。可以在Luban上面进行图形的制作以及机械臂的画画和雕刻功能。
luban interface
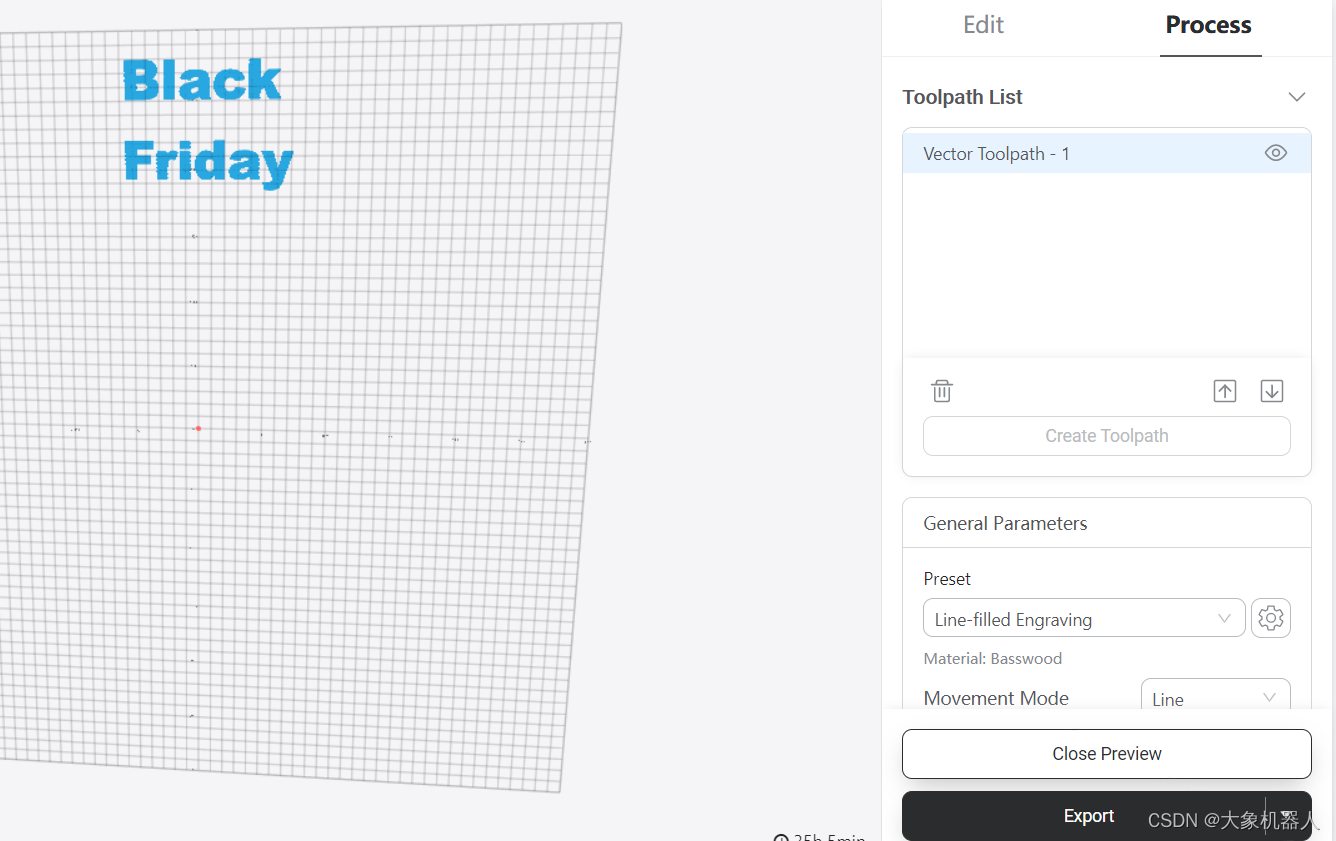
图像处理
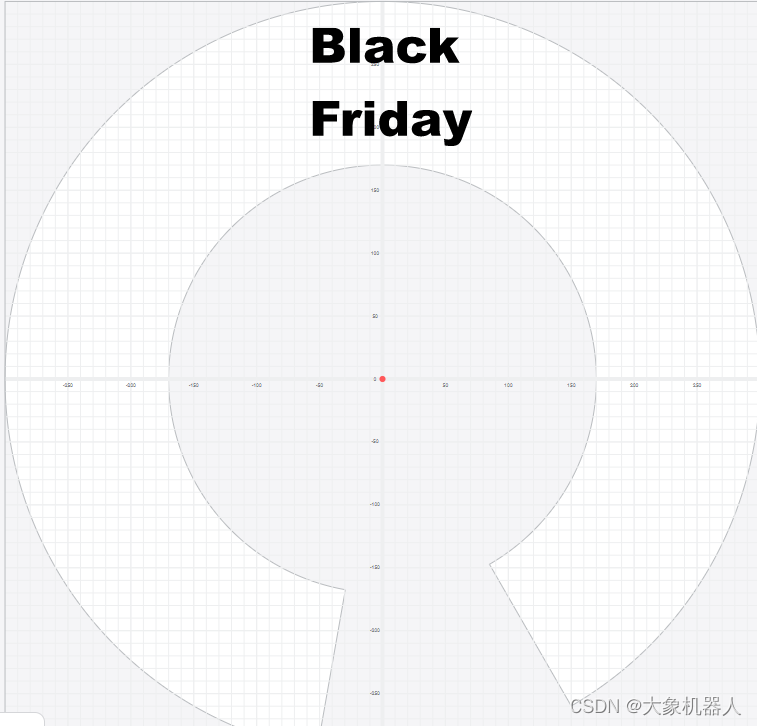
要在机械臂的工作半径内设计图形,luban是专门适配ultraArm的软件,白色区域的是机械臂可以达到的范围。所以我们要在白色的区域进行图案的绘制。
对目标图像进行栅格化处理,转化为机械臂能够理解的路径/指令,通常是G-code代码文件。
路径规划算法
在生成G-Code代码文件时,会根据算法设计出一套机械臂最为合适的路径规划。这里用到了商旅性问题(TSP)算法。https://en.wikipedia.org/wiki/Travelling_salesman_problem
TSP:它的目标是找到一条路径,使得旅行推销员可以访问一系列城市各一次并最终返回出发城市,同时保证总旅程的距离或成本最小。例如下图有四个城市,他们分别是0,1,2,3,他们之间往来的代价如下图:
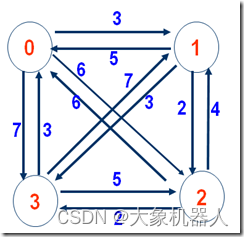
最优解:0->1->2->3->0 =10
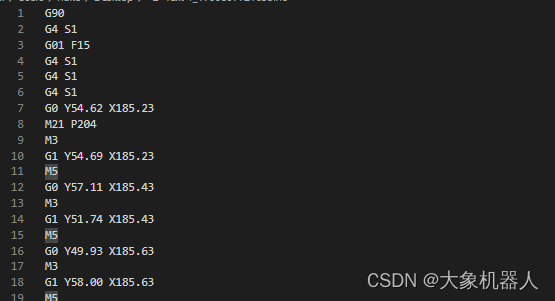
同样的道理,通过对图形的分析,确定雕刻路径最有顺序,以减少移动时间和提高效率。生成 的G-code代码如下,发送点位给机械臂去执行。
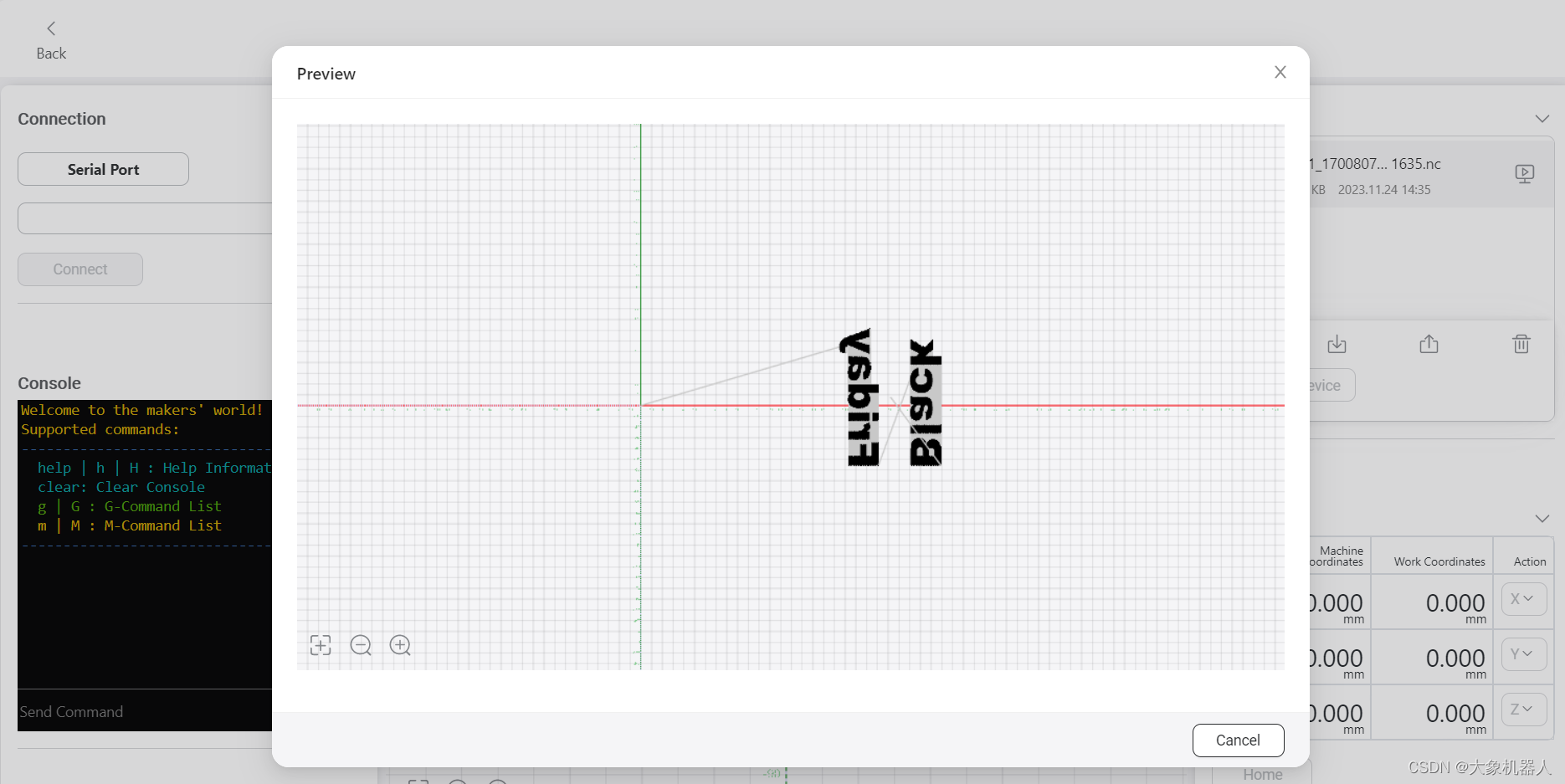
导入到工作区域,可以预览机械臂运行的轨迹(灰色的线),以及激光雕刻的效果图。
总结
通过文章的介绍,即使是一个对机械臂了解不深的人也能够快速上手操作实现diy作品。不用十分钟,就可以设计出一个独特的图案并进行雕刻,操作起来十分的便捷。虽然机械臂看着小巧,但它的性能足以完成雕刻应用。
不仅如此,ultraArm p340搭载着高精度的步进电机,也可以实现一些3C轻工业,装配,质检,分拣等重复性的工作。ultraArm的多功能性和灵活性使其成为一个非常实用的工具,适合多种不同的应用场景和需求。
审核编辑 黄宇
-
开源
+关注
关注
3文章
3243浏览量
42378 -
python
+关注
关注
55文章
4778浏览量
84438 -
激光雕刻
+关注
关注
0文章
20浏览量
7078 -
机械臂
+关注
关注
12文章
509浏览量
24485
发布评论请先 登录
相关推荐
怎样做ZL-01C单臂数显小动物脑立体定位仪实验?
得利捷固定式读码器读取金属表面激光雕刻DPM码的优势
开源六轴协作机器人myCobot 320结合人脸表情识别情绪!

大象机器人开源协作机械臂机械臂接入GPT4o大模型!

桌面型激光雕刻机的发展前景及TMC应用优势
机械臂技术的前沿探索:年度案例回顾!
如何去提升机械臂的位置控制性能?

大象机器人六轴协作机械臂myCobot 320 进行手势识别!

使用ChatGPT学习大象机器人六轴协作机械臂mechArm!

宏集七轴机械臂,以精准力控实现柔性抛光打磨!

【开源获奖案例】四轴机械臂控制系统

七轴开源协作机械臂myArm视觉跟踪技术!
开源六轴协作机械臂MechArm案例演示!





 工商网监
工商网监
评论