 机器人通信模型有哪些
机器人通信模型有哪些
机器人是一个复杂的智能系统,并不仅仅是键盘遥控运动、识别某个目标这么简单,我们需要实现的是送餐、送货、分拣等满足具体场景需求的机器人。
在这些应用功能的实现中,另外一种ROS通信机制也会被常常用到——那就是动作。从这个名字上就可以很好理解这个概念的含义,这种通信机制的目的就是便于对机器人某一完整行为的流程进行管理。
通信模型
举个例子,比如我们想让机器人转个圈,这肯定不是一下就可以完成的,机器人得一点一点旋转,直到360度才能结束,假设机器人并不在我们眼前,发出指令后,我们根本不知道机器人到底有没有开始转圈,转到哪里了?
OK,现在我们需要的是一个反馈,比如每隔1s,告诉我们当前转到多少度了,10度、20度、30度,一段时间之后,到了360度,再发送一个信息,表示动作执行完成。
这样一个需要执行一段时间的行为,使用动作的通信机制就更为合适,就像装了一个进度条,我们可以随时把控进度,如果运动过程当中,我们还可以随时发送一个取消运动的命令。
客户端/服务器模型
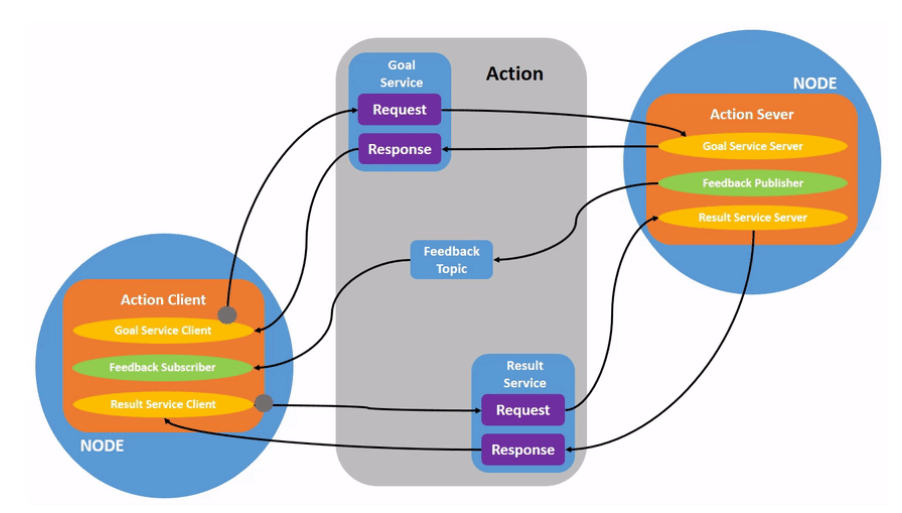
动作和服务类似,使用的也是客户端和服务器模型,客户端发送动作的目标,想让机器人干什么,服务器端执行动作过程,控制机器人达到运动的目标,同时周期反馈动作执行过程中的状态。
客户端发送一个运动的目标,想让机器人动起来,服务器端收到之后,就开始控制机器人运动,一边运动,一边反馈当前的状态。
如果是一个导航动作,这个反馈可能是当前所处的坐标,如果是机械臂抓取,这个反馈可能又是机械臂的实时姿态。当运动执行结束后,服务器再反馈一个动作结束的信息。整个通信过程就此结束。
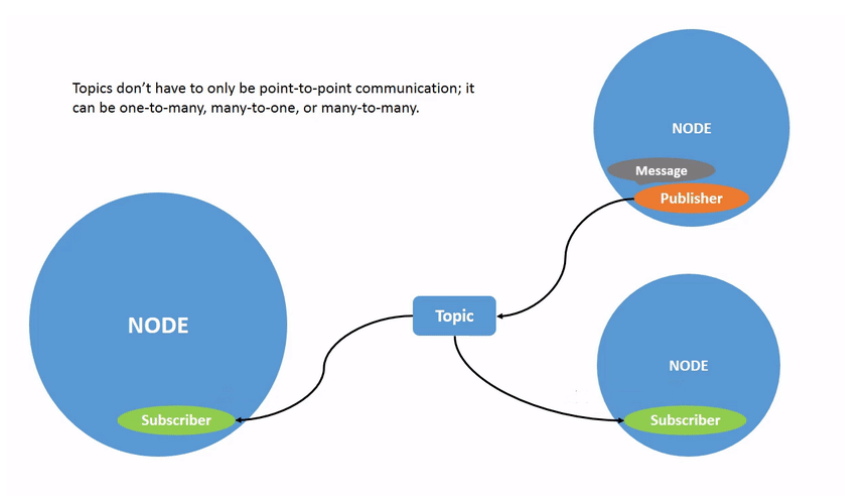
一对多通信
和服务一样,动作通信中的客户端可以有多个,大家都可以发送运动命令,但是服务器端只能有一个,毕竟只有一个机器人,先执行完成一个动作,才能执行下一个动作。
同步通信
既然有反馈,那动作也是一种同步通信机制,之前我们也介绍过,动作过程中的数据通信接口,使用.action文件进行定义。
由服务和话题合成
大家再仔细看下上边的动图,是不是还会发现一个隐藏的秘密。
动作的三个通信模块,竟然有两个是服务,一个是话题,当客户端发送运动目标时,使用的是服务的请求调用,服务器端也会反馈一个应带,表示收到命令。
动作的反馈过程,其实就是一个话题的周期发布,服务器端是发布者,客户端是订阅者。
没错,动作是一种应用层的通信机制,其底层就是基于话题和服务来实现的。
-
机器人
+关注
关注
211文章
28745浏览量
208907 -
服务器
+关注
关注
12文章
9342浏览量
86207 -
通信模型
+关注
关注
0文章
10浏览量
7861 -
ROS
+关注
关注
1文章
281浏览量
17140
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
基于VxWorks实时操作系统的通信模型该怎样去设计?
最实用的STM32和ROS机器人的串口通信方案
全向轮机器人有哪些特性?
将Simulink模型与Lego机器人结合使用
移动Agent位置透明通信模型的设计
基于VxWorks的通信模型设计

什么是通信模型DDS
机器人多节点话题通信模型介绍
通信模型的多对多通信、异步通信和消息接口是什么





 工商网监
工商网监
评论