 机器人多节点动作通信编程方法
机器人多节点动作通信编程方法
编程方法
相比之前话题和服务的程序,动作通信的例程相对较长,我们一起来运行并分析一下。
运行示例程序
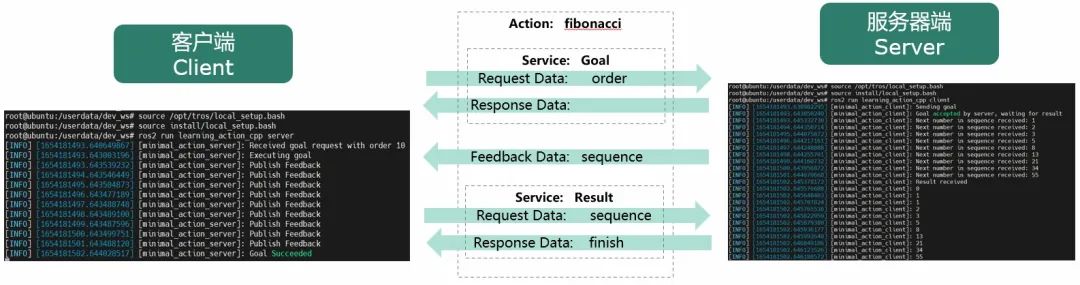
$ source /opt/tros/local_setup.bash
$ source install/local_setup.bash
$ ros2 run learning_action_cpp server
$ ros2 run learning_action_cpp client
代码解析
动作的服务器fibonacci_action_server.cpp:
#include < inttypes.h >
#include < memory >
#include "learning_action_cpp/action/fibonacci.hpp"
#include "rclcpp/rclcpp.hpp"
// TODO(jacobperron): Remove this once it is included as part of 'rclcpp.hpp'
#include "rclcpp_action/rclcpp_action.hpp"
class MinimalActionServer : public rclcpp::Node
{
public:
using Fibonacci = learning_action_cpp::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ServerGoalHandle< Fibonacci >;
explicit MinimalActionServer(const rclcpp::NodeOptions & options = rclcpp::NodeOptions())
: Node("minimal_action_server", options)
{
using namespace std::placeholders;
this- >action_server_ = rclcpp_action::create_server< Fibonacci >(
this- >get_node_base_interface(),
this- >get_node_clock_interface(),
this- >get_node_logging_interface(),
this- >get_node_waitables_interface(),
"fibonacci",
std::bind(&MinimalActionServer::handle_goal, this, _1, _2),
std::bind(&MinimalActionServer::handle_cancel, this, _1),
std::bind(&MinimalActionServer::handle_accepted, this, _1));
}
private:
rclcpp_action::Server< Fibonacci >::SharedPtr action_server_;
rclcpp_action::GoalResponse handle_goal(
const rclcpp_action::GoalUUID & uuid,
std::shared_ptr< const Fibonacci::Goal > goal)
{
RCLCPP_INFO(this- >get_logger(), "Received goal request with order %d", goal- >order);
(void)uuid;
// Let's reject sequences that are over 9000
if (goal- >order > 9000) {
return rclcpp_action::GoalResponse::REJECT;
}
return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE;
}
rclcpp_action::CancelResponse handle_cancel(
const std::shared_ptr< GoalHandleFibonacci > goal_handle)
{
RCLCPP_INFO(this- >get_logger(), "Received request to cancel goal");
(void)goal_handle;
return rclcpp_action::CancelResponse::ACCEPT;
}
void execute(const std::shared_ptr< GoalHandleFibonacci > goal_handle)
{
RCLCPP_INFO(this- >get_logger(), "Executing goal");
rclcpp::Rate loop_rate(1);
const auto goal = goal_handle- >get_goal();
auto feedback = std::make_shared< Fibonacci::Feedback >();
auto & sequence = feedback- >sequence;
sequence.push_back(0);
sequence.push_back(1);
auto result = std::make_shared< Fibonacci::Result >();
for (int i = 1; (i < goal- >order) && rclcpp::ok(); ++i) {
// Check if there is a cancel request
if (goal_handle- >is_canceling()) {
result- >sequence = sequence;
goal_handle- >canceled(result);
RCLCPP_INFO(this- >get_logger(), "Goal Canceled");
return;
}
// Update sequence
sequence.push_back(sequence[i] + sequence[i - 1]);
// Publish feedback
goal_handle- >publish_feedback(feedback);
RCLCPP_INFO(this- >get_logger(), "Publish Feedback");
loop_rate.sleep();
}
// Check if goal is done
if (rclcpp::ok()) {
result- >sequence = sequence;
goal_handle- >succeed(result);
RCLCPP_INFO(this- >get_logger(), "Goal Succeeded");
}
}
void handle_accepted(const std::shared_ptr< GoalHandleFibonacci > goal_handle)
{
using namespace std::placeholders;
// this needs to return quickly to avoid blocking the executor, so spin up a new thread
std::thread{std::bind(&MinimalActionServer::execute, this, _1), goal_handle}.detach();
}
}; // class MinimalActionServer
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_server = std::make_shared< MinimalActionServer >();
rclcpp::spin(action_server);
rclcpp::shutdown();
return 0;
}
动作的客户端fibonacci_action_client.cpp:
#include < inttypes.h >
#include < memory >
#include < string >
#include < iostream >
#include "learning_action_cpp/action/fibonacci.hpp"
#include "rclcpp/rclcpp.hpp"
// TODO(jacobperron): Remove this once it is included as part of 'rclcpp.hpp'
#include "rclcpp_action/rclcpp_action.hpp"
class MinimalActionClient : public rclcpp::Node
{
public:
using Fibonacci = learning_action_cpp::action::Fibonacci;
using GoalHandleFibonacci = rclcpp_action::ClientGoalHandle< Fibonacci >;
explicit MinimalActionClient(const rclcpp::NodeOptions & node_options = rclcpp::NodeOptions())
: Node("minimal_action_client", node_options), goal_done_(false)
{
this- >client_ptr_ = rclcpp_action::create_client< Fibonacci >(
this- >get_node_base_interface(),
this- >get_node_graph_interface(),
this- >get_node_logging_interface(),
this- >get_node_waitables_interface(),
"fibonacci");
this- >timer_ = this- >create_wall_timer(
std::chrono::milliseconds(500),
std::bind(&MinimalActionClient::send_goal, this));
}
bool is_goal_done() const
{
return this- >goal_done_;
}
void send_goal()
{
using namespace std::placeholders;
this- >timer_- >cancel();
this- >goal_done_ = false;
if (!this- >client_ptr_) {
RCLCPP_ERROR(this- >get_logger(), "Action client not initialized");
}
if (!this- >client_ptr_- >wait_for_action_server(std::chrono::seconds(10))) {
RCLCPP_ERROR(this- >get_logger(), "Action server not available after waiting");
this- >goal_done_ = true;
return;
}
auto goal_msg = Fibonacci::Goal();
goal_msg.order = 10;
RCLCPP_INFO(this- >get_logger(), "Sending goal");
auto send_goal_options = rclcpp_action::Client< Fibonacci >::SendGoalOptions();
send_goal_options.goal_response_callback =
std::bind(&MinimalActionClient::goal_response_callback, this, _1);
send_goal_options.feedback_callback =
std::bind(&MinimalActionClient::feedback_callback, this, _1, _2);
send_goal_options.result_callback =
std::bind(&MinimalActionClient::result_callback, this, _1);
auto goal_handle_future = this- >client_ptr_- >async_send_goal(goal_msg, send_goal_options);
}
private:
rclcpp_action::Client< Fibonacci >::SharedPtr client_ptr_;
rclcpp::TimerBase::SharedPtr timer_;
bool goal_done_;
void goal_response_callback(std::shared_future< GoalHandleFibonacci::SharedPtr > future)
{
auto goal_handle = future.get();
if (!goal_handle) {
RCLCPP_ERROR(this- >get_logger(), "Goal was rejected by server");
} else {
RCLCPP_INFO(this- >get_logger(), "Goal accepted by server, waiting for result");
}
}
void feedback_callback(
GoalHandleFibonacci::SharedPtr,
const std::shared_ptr< const Fibonacci::Feedback > feedback)
{
RCLCPP_INFO(
this- >get_logger(),
"Next number in sequence received: %" PRId32,
feedback- >sequence.back());
}
void result_callback(const GoalHandleFibonacci::WrappedResult & result)
{
this- >goal_done_ = true;
switch (result.code) {
case rclcpp_action::ResultCode::SUCCEEDED:
break;
case rclcpp_action::ResultCode::ABORTED:
RCLCPP_ERROR(this- >get_logger(), "Goal was aborted");
return;
case rclcpp_action::ResultCode::CANCELED:
RCLCPP_ERROR(this- >get_logger(), "Goal was canceled");
return;
default:
RCLCPP_ERROR(this- >get_logger(), "Unknown result code");
return;
}
RCLCPP_INFO(this- >get_logger(), "Result received");
for (auto number : result.result- >sequence) {
RCLCPP_INFO(this- >get_logger(), "%" PRId32, number);
}
}
}; // class MinimalActionClient
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto action_client = std::make_shared< MinimalActionClient >();
while (!action_client- >is_goal_done()) {
rclcpp::spin_some(action_client);
}
rclcpp::shutdown();
return 0;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28390浏览量
206959 -
通信
+关注
关注
18文章
6029浏览量
135957 -
程序
+关注
关注
117文章
3785浏览量
81010
发布评论请先 登录
相关推荐
机器人所用的线缆动作
根据机器人的动作选择电缆首先请掌握电缆的动作。配线时尽量加大弯曲半径,减少扭转和摩擦是减少断线故障的要点,然后根据该动作下的期望寿命,选择最合适的配线材料和配线
发表于 06-09 10:44
多节点大容量FPGA系统的远程升级方法
多节点大容量FPGA系统的远程升级方法:针对目前广泛使用的以大容量FPGA 实现主要功能的多节点系统的远程升级问题,提出了一种基于ATmega64 单片机和RS485 总线以及接入以太网的主控
发表于 11-20 17:42
•17次下载
多节点大容量FPGA系统的远程升级方法
多节点大容量FPGA系统的远程升级方法
针对目前广泛使用的以大容量FPGA实现主要功能的多节点系统的远程升级问题,提出了一种基于ATmega64单片机和RS485总
发表于 03-29 15:09
•820次阅读
机器人的最佳编程语言是什么?机器人十大流行编程语言汇总
机器人的主要特点之一是其通用性,是机器人具有可编程能力是实现这一特点的重要手段。机器人编程必然涉及机器人
常用的机器人编程方法有哪些
机器人编程【robotprogramming】为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编
发表于 08-15 17:41
•1.6w次阅读
机器人编程是学的什么_机器人编程有什么前景
机器人编程为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制
机器人多节点话题通信模型介绍
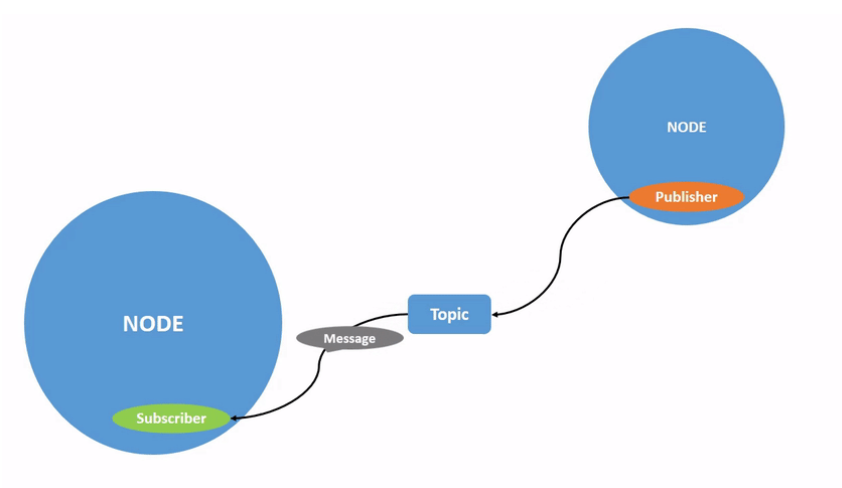
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它是节点间传递数据的桥梁。 通信模型 以两个
机器人多节点话题通信编程方法
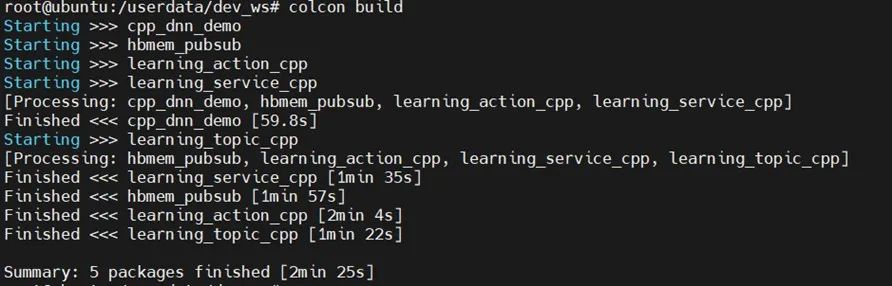
编程方法 了解了话题的基本原理,接下来我们就要开始编写代码啦。 创建工作空间 请大家先按照这个流程创建工作空间、下载课程的例程代码,并进行编译。 $ mkdir –p dev_ws/src $ cd





 工商网监
工商网监
评论