 通信模型的多对多通信、异步通信和消息接口是什么
通信模型的多对多通信、异步通信和消息接口是什么
多对多通信
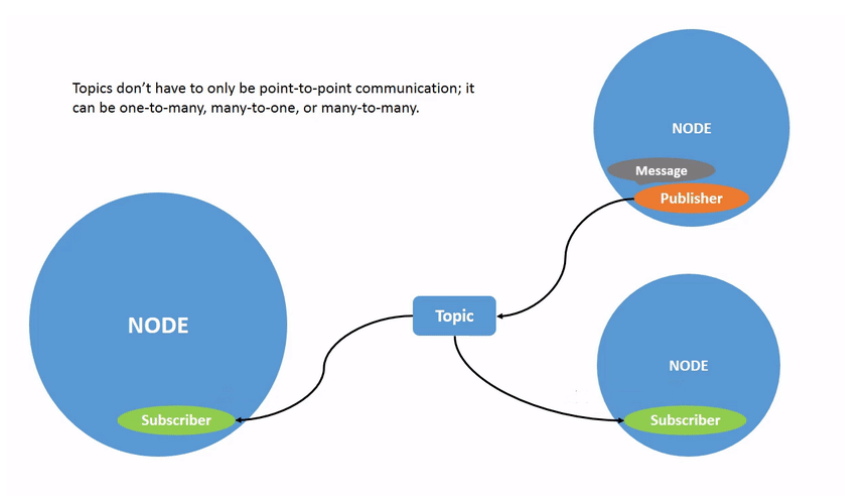
大家再仔细想下这些可以订阅的东西,是不是并不是唯一的,我们每个人可以订阅很多公众号、报纸、杂志,这些公众号、报纸、杂志也可以被很多人订阅。没错,ROS里的话题也是一样,发布者和订阅者的数量并不是唯一的,可以称之为是多对多的通信模型。
因为话题是多对多的模型,发布控制指令的摇杆可以有一个,也可以有2个、3个,订阅控制指令的机器人可以有1个,也可以有2个、3个。
大家可以想象一下这个画面,似乎还是挺魔性的,如果存在多个发送指令的节点,建议大家要注意区分优先级,不然机器人可能不知道该听谁的了。
异步通信
话题通信还有一个特性,那就是异步,这个词可能有同学是第一次听说?所谓异步,只要是指发布者发出数据后,并不知道订阅者什么时候可以收到。
类似古月居公众号发布一篇文章,你什么时候阅读的,古月居根本不知道,报社发出一份报纸,你什么时候收到,报社也是不知道的。这就叫做异步。
异步的特性也让话题更适合用于一些周期发布的数据,比如传感器的数据,运动控制的指令等等,如果某些逻辑性较强的指令,比如修改某一个参数,用话题传输就不太合适了。
消息接口
最后,既然是数据传输,发布者和订阅者就得统一数据的描述格式,不能一个说英文,一个理解成了中文。在ROS中,话题通信数据的描述格式称之为消息,对应编程语言中数据结构的概念。
比如这里的一个图像数据,就会包含图像的长宽像素值、每个像素的RGB等等,在ROS中都有标准定义。
消息是ROS中的一种接口定义方式,与编程语言无关,我们也可以通过.msg后缀的文件自行定义,有了这样的接口,各种节点就像积木块一样,通过各种各样的接口进行拼接,组成复杂的机器人系统。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28180浏览量
206384 -
数据
+关注
关注
8文章
6867浏览量
88800 -
异步通信
+关注
关注
1文章
57浏览量
10116 -
通信模型
+关注
关注
0文章
10浏览量
7809
发布评论请先 登录
相关推荐
MQTT的通信模型及消息
MQTT通信模型 MQTT协议是基于客户端-服务器模型,在协议中主要有三种身份:发布者(Publisher)、服务器(Broker) 以及订阅者(Subscriber)。 并且消息发布者可以
发表于 01-19 15:57
基于VxWorks实时操作系统的通信模型该怎样去设计?
多任务实时操作系统VxWorks是什么?与传统通信机制相比,模块间通信模型有什么优势?基于VxWorks实时操作系统的通信模型该怎样去设计?
发表于 04-26 06:25
怎样通过WebRTC实现多对多通信呢
WebRTC 本身提供的是 1 对 1 的通信模型,在 STUN/TURN 的辅助下,如果能实现 NAT 穿越,那么两个浏览器是可以直接进行媒体数据交换的;如果不能实现 NAT 穿越,那么只能通过
发表于 11-03 07:17
移动Agent位置透明通信模型的设计
提出一种高效可靠的移动Agent通信模型――D-C通信模型,结合域名字解析器和移动Agent系统中的Communicator实现移动Agent之间的通信。通过引入一种基于全局的、与位置无关的命名方法
发表于 04-16 08:53
•26次下载
数据网格中基于优化机制的通信模型
针对基于多计算机机群构成的网格的大规模并行计算的需要,对多级分组通信模型的单一机群分组通信进行了研究。探讨了在单一机群内的主动节点、被动节点个数和各个计算节点
发表于 06-25 13:52
•12次下载
基于VxWorks的通信模型设计
本文提出了一种任务间的通信模型,将用于网络通信的UDP方式引进到任务间的通信中,使通信更加灵活和便于管理,改善了整个系统的性能。
发表于 06-01 10:07
•1013次阅读

什么是通信模型DDS
完成的,它相当于是ROS机器人系统中的神经网络。 通信模型 DDS的核心是通信,能够实现通信的模型和软件框架非常多,这里我们列出常用的四种





 工商网监
工商网监
评论