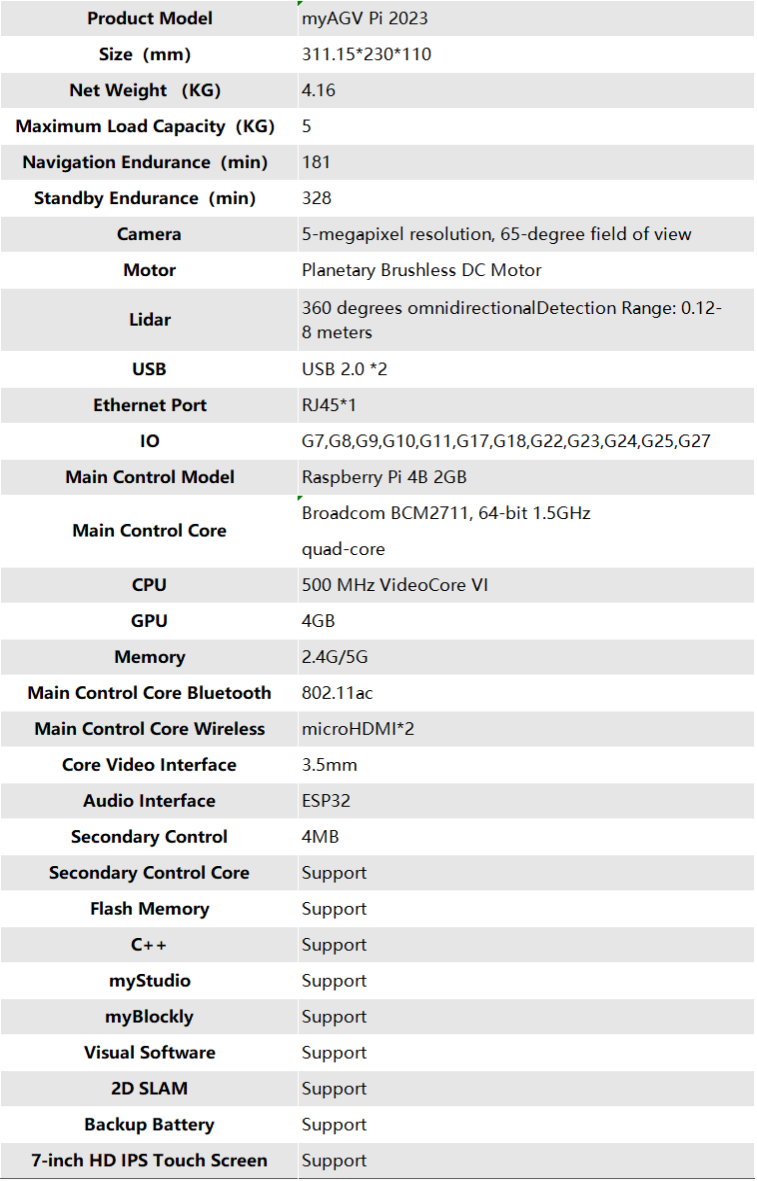
 myAGV 2023 Pi 全新升级!
myAGV 2023 Pi 全新升级!
Introduction
在高速发展的自动化和机器人技术领域,我们的公司一直致力于提供高效、灵活且可靠的轻量级机械臂解决方案。然而,我们也深知,传统的机械臂需要固定在一个地方,这在一定程度上限制了其在空间上的应用范围。为了突破这一限制,我们推出了全新的移动地盘产品—myAGV。
myAGV是一款以树莓派4b为主控的AGV,它可以搭载我们公司的轻量级机械臂,将两者组装成一个复合机器人。这不仅大大扩展了机械臂的应用范围,也让其在空间上的移动变得更为灵活自由。

此外,myAGV还搭载了一颗360度全面雷达和麦克纳姆轮全向轮胎,使其具有更强的环境感知和移动能力。同时,myAGV支持ROS1平台的开发,能够实现建图、导航、避障等功能,为用户提供更全面、更高效的解决方案。
接下来的部分,我们将详细介绍myAGV的新迭代和升级,以及这些改变如何帮助用户更好地应对各种应用场景的挑战。
Background of Product Iteration and Upgrade
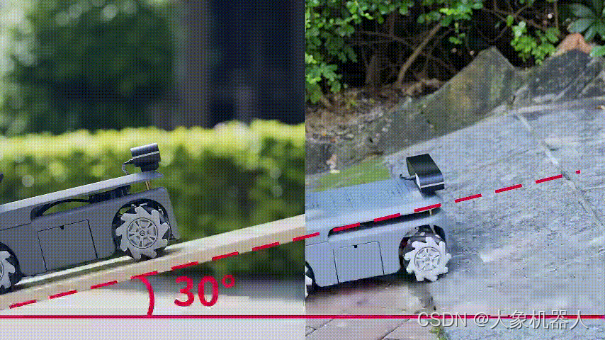
自myAGV产品推出以来,我们不断收集和分析用户反馈,以及监控市场需求和技术进展。我们发现,在某些复杂地形上,myAGV的性能表现存在一定的偏差,这主要是由于当前的导航算法和结构设计限制所致。此外,我们还注意到,在动态避障方面,myAGV的反应灵敏度有待提高,这些问题反映了潜在的算法和结构设计不足。
为了解决这些问题,并提高myAGV的整体性能和用户体验,我们决定进行产品的迭代升级。这一升级不仅针对现有问题,也致力于引入最新技术,以适应不断变化的市场需求。其中,3D摄像头技术的进步为我们提供了新的解决方案。通过集成先进的3D摄像头,我们可以大幅提升myAGV的导航精准度和环境适应能力,尤其是在复杂和动态的环境中。这次迭代升级是对产品未来规划的重要一步,旨在通过技术创新持续提升产品性能,满足用户的期望,并在竞争激烈的市场中保持领先地位。
Detailed Introduction of Product Iteration and Upgrade
在最新版本的myAGV中,我们实现了全面的性能升级,重点在于提高效率、增强用户体验,并解决之前版本中的关键问题。
电机升级:原有的减速电机被高效的行星无刷直流电机所取代。这一改变显著提高了myAGV的运动效率和可靠性,同时降低了维护成本。
减速电机(原电机)
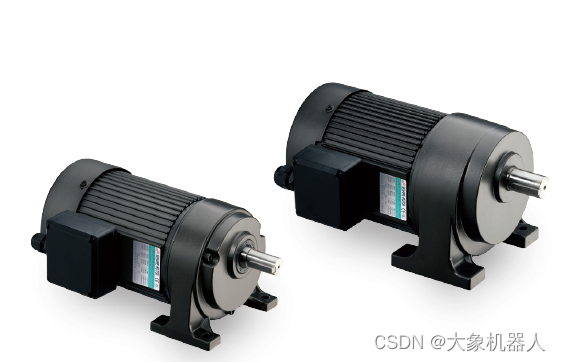
定义:减速电机是一种集成了齿轮减速箱和电动机的组合设备。它通过齿轮减速箱降低电动机的速度,同时增加输出扭矩。
优点:提供高扭矩,成本相对较低,适合低速、高扭矩的应用。
缺点:体积较大,效率较低,噪音较高,且齿轮磨损会影响性能和寿命。
行星无刷直流电机(新电机)
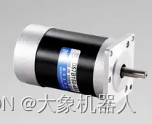
定义:行星无刷直流电机是一种高效的电机,配备有行星齿轮系统和无刷电机。无刷电机使用电子方式(而非机械刷子)来控制电机的运转,提供更平滑的运行和更高的效率。
优点:更高的效率:相较于有刷电机,无刷电机的效率更高,因为它减少了因摩擦和电刷磨损导致的能量损耗。
更长的寿命:由于缺乏磨损的电刷,无刷电机通常拥有更长的使用寿命。
更小的体积和重量:在相同的功率输出下,无刷电机通常更小更轻。
更低的维护需求:由于没有电刷的磨损问题,无刷电机的维护需求更低。
应用:行星齿轮系统提供了高效的扭矩传输,使得行星无刷直流电机非常适合需要精确控制和高效能传输的场合。
性能提升
通过从减速电机升级到行星无刷直流电机,myAGV获得了更高的能效和性能。新电机的更高效率意味着更少的能量浪费,从而提高了续航能力。同时,更小的体积和重量使得myAGV在机动性和灵活性方面也有所提升。另外,降低的维护需求和更长的使用寿命进一步提高了myAGV的总体可靠性和经济效益。
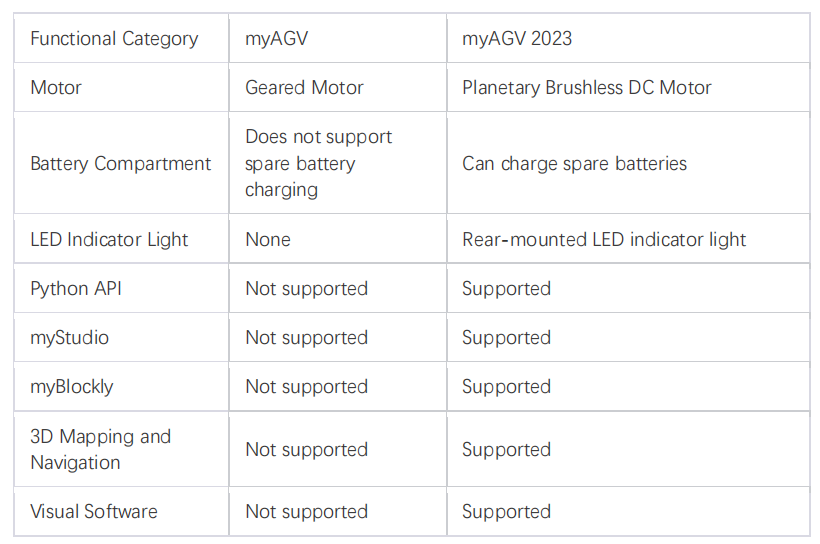
续航能力增强:新版myAGV的待机续航时间达到了328分钟,满载工作时的续航时间为181分钟。引入了可选的额外电池仓,使得续航时间得以翻倍,进一步增强了myAGV在长时间任务中的表现。
外观和功能性改进:新增的LED显示灯不仅让myAGV看起来更具科技感,而且提高了工作状态的可视性。这些LED灯还能帮助操作者实时监控myAGV的状态。

增强的编程接口:为了更好地满足开发者和高级用户的需求,我们引入了Python API接口,允许用户更灵活地控制myAGV的运动。同时,我们还推出了图形化编程软件myblockly,通过拖拽式编程提供更友好的用户体验。
from pymycobot import myAGV
# Create a agv object
ma = myAGV('/dev/ttyAMA0',1000000)
# Set up LED lights
ma.set_led(mode, R, G, B)
# Get firmware version number
ma.get_firmware_version()
#Get the total current of the motor
ma.get_motors_current()
#Control the car to rotate forward, backward, left, right and forward/counterclockwise.
ma.move_control(direction_1, direction_2, direction_3)
'''
Parameters:
direction_1 – (int) Control forward or backward: 0 ~ 127 is backward, 129 ~ 255 is forward, 128 is stop.
direction_2 – (int) control left and right movement: 0 ~ 127 is right, 129 ~ 255 is left, 128 is stop.
direction_3 – (int) control rotation: 0 ~ 127 is clockwise, 129 ~ 255 is counterclockwise, 128 is stop.
'''
#Control the car to move forward
ma.go_ahead(go_speed)
#Control the car back
ma.retreat(back_speed)
#Control the car to pan to the left
ma.pan_left(pan_left_speed)
#Control the car to pan to the right
ma.pan_right(pan_left_speed)
#Stop motion
ma.stop()

交互界面的升级:引入了一个7英寸的可触摸屏幕,使操作者能够更直观地了解myAGV的运行状态和环境信息。

结构和电机的优化:通过对结构和电机的升级,我们显著提升了myAGV在复杂环境下的定位导航精度。
新版myAGV不仅在技术上更加先进,而且在实际应用中更加可靠和用户友好。我们相信这些改进将使myAGV在市场上更具竞争力,并为用户提供更加出色的自动导引车体验。
Summary
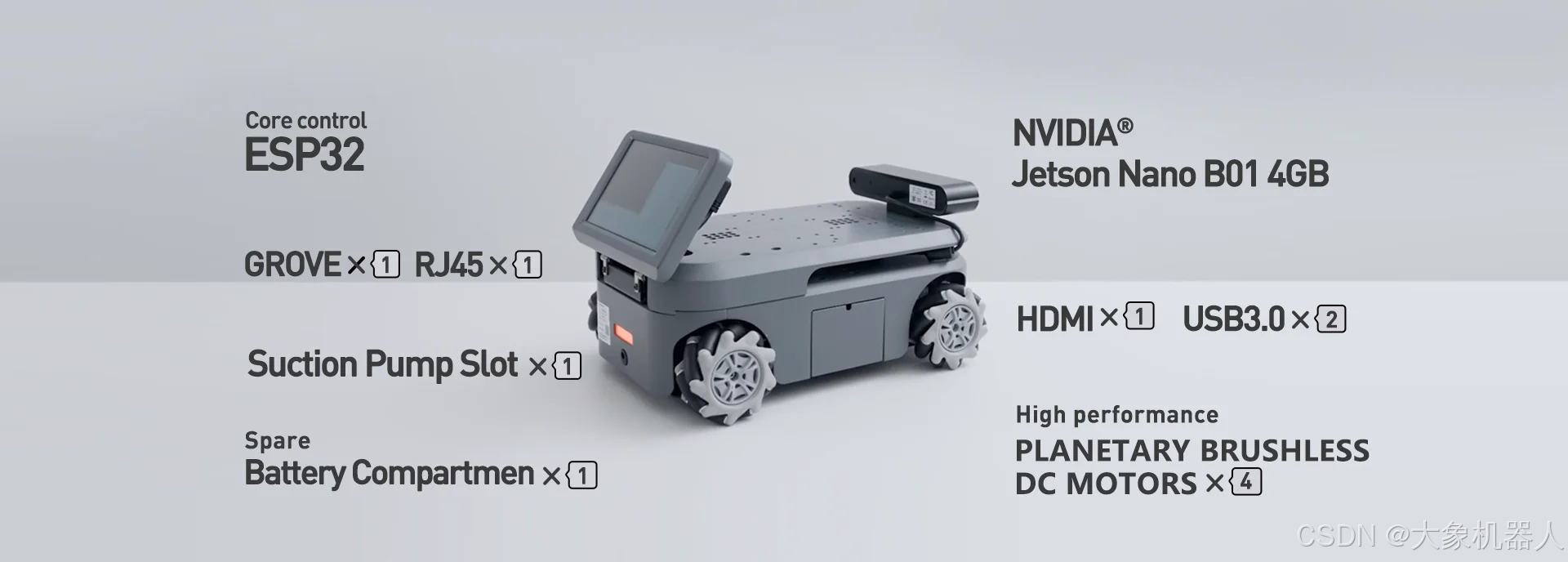
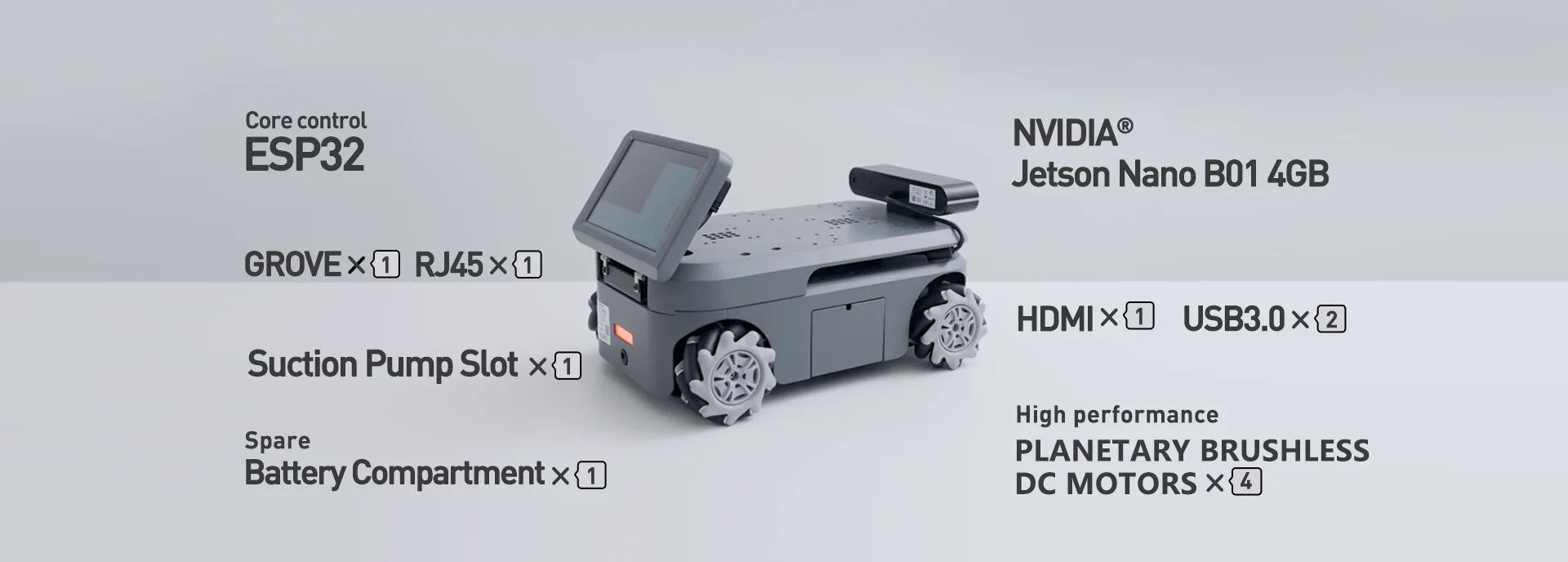
myAGV 2023的最新迭代推出了两个版本,分别以树莓派和NVIDIA Jetson Nano作为各自的控制核心。每个版本都针对不同的应用场景和性能需求进行了特别设计,以确保满足广泛的用户需求。
在本篇文章中,我们重点介绍了myAGV的全面性能升级,展示了如何通过技术创新不断提升产品的性能和用户体验。这些升级旨在确保myAGV在自动化导引车行业中保持领先地位,同时为用户提供更高效、更可靠的解决方案。
在未来的文章中,我们将深入探讨这两个版本的具体特点和应用场景,帮助您了解哪个版本的myAGV更适合您的特定需求。敬请期待更多关于myAGV的深入分析和实用指南,帮助您充分利用这一创新产品的强大功能。
审核编辑 黄宇
-
机器人
+关注
关注
210文章
28180浏览量
206321 -
AGV
+关注
关注
27文章
1277浏览量
41000 -
python
+关注
关注
55文章
4778浏览量
84439
发布评论请先 登录
相关推荐
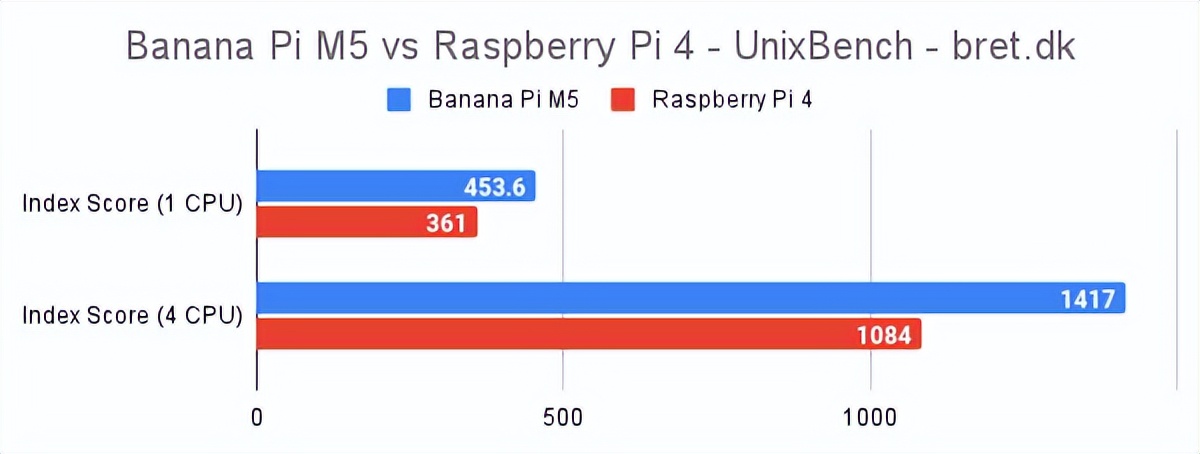
Banana Pi M5 与 Raspberry Pi 4 – 基准测试
PI助力aCentauri车队在太阳能车挑战赛中大放异彩
e络盟开售Raspberry Pi AI 摄像头
e络盟发售功能强大的入门级 Raspberry Pi 5 2GB

使用myAGV、Jetson Nano主板和3D摄像头,实现了RTAB-Map的三维建图功能!
Diodes公司推出高速视频开关PI3WVR41310,助力新一代显示器升级
Jetson Nano集成探索大象机器人myAGV上的 SLAM 算法!
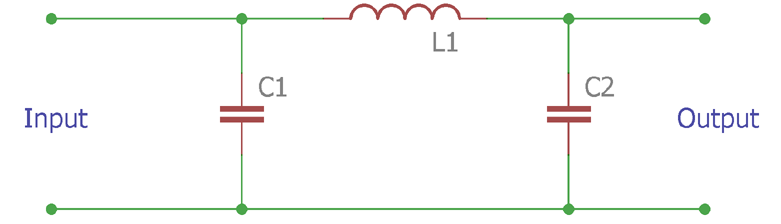
Pi滤波器的Python实现示例
搭载 树莓派5 Raspberry Pi 5 全新的HMI发布!

天合跟踪全新升级开拓者1P 700W+最佳匹配智能跟踪解决方案发布
IAR EWARM全新升级、SEGGER推出免费商用Embedded Studio





 工商网监
工商网监
评论