 如何在树莓派Pico上使用摇杆?
如何在树莓派Pico上使用摇杆?
模拟二轴拇指操纵杆(俗称摇杆)是一种模拟操纵杆,相比于「方向」操纵杆更加准确和灵敏,它带有一个「按下选择按钮」。因为它是模拟的,所以需要使用树莓派 Pico 上支持模拟输入的引脚来读取,下面我们选择的是 GP26 和 GP27。分别来读取 X 和 Y。而按钮按下状态可使用数字引脚 GP22 来读取。
硬件连接
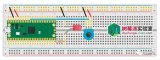
摇杆的 GND 接 Pico 的 GND。
摇杆的 +5V 接 Pico 的 VSYS。
摇杆的 VRX 接 Pico 的 GP27。
摇杆的 VRY 接 Pico 的 GP26。
摇杆的 SW 接 Pico 的 GP22。
具体代码如下。其中当读取到的模拟量不超过 600 时判定为「左」或者「下」,而当读取到的模拟量大于或等于 60000 时判定为「右」或者「上」,介于这中间时判定为「中」。这个标准也可以微调来控制摇杆的灵敏度。
import machine import utime X_axis = machine.ADC(26) Y_axis = machine.ADC(27) press = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP) while True: X_axis_value = X_axis.read_u16() Y_axis_value = Y_axis.read_u16() if X_axis_value <= 600: print("X: "+"Left ", end='') elif X_axis_value >= 60000: print("X: "+"Right ", end='') elif 600 < X_axis_value < 60000: print("X: "+"Middle ", end='') if Y_axis_value <= 600: print("Y: "+"Down") elif Y_axis_value >= 60000: print("Y: "+"Up") elif 600 < Y_axis_value < 60000: print("Y: "+"Middle") if press.value() == 0: print("Pressed") utime.sleep(0.5)
运行之后,上下左右拨动摇杆,可以看到 Shell 窗口输出的方向变化。按下摇杆,会看到 Shell 窗口输出「Pressed」。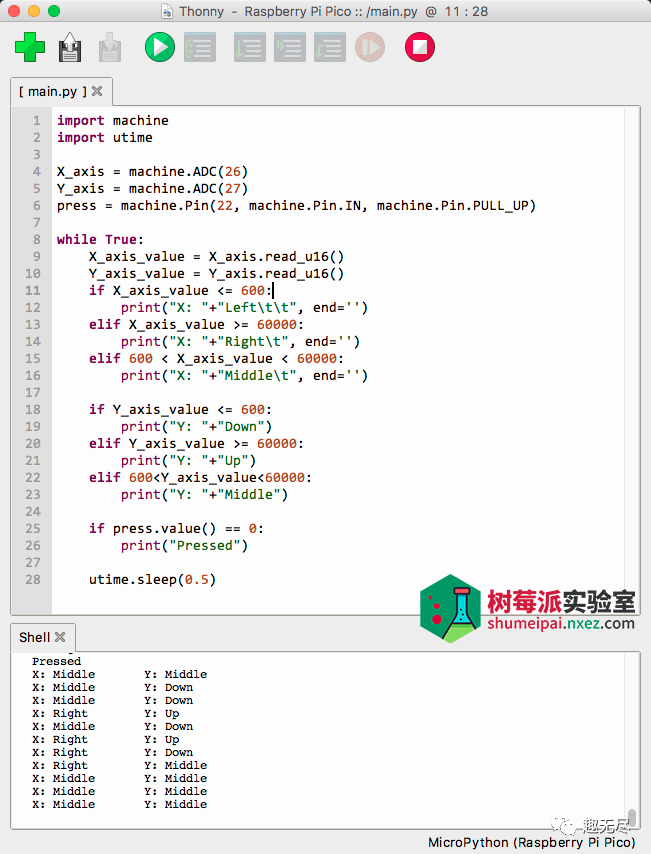
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
GND
+关注
关注
2文章
540浏览量
38929 -
树莓派
+关注
关注
117文章
1711浏览量
105930
原文标题:在树莓派 Pico 上使用摇杆
文章出处:【微信号:趣无尽,微信公众号:趣无尽】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何在树莓派Pico上用PWM实现LED呼吸灯呢?
树莓派 Pico 上的模拟-数字转换器只能以一种方式工作,它将模拟信号转换为微控制器可以理解的数字信号。
发表于 10-07 17:46
•1476次阅读
树莓派Pico的相关资料分享
关注、星标公众号,直达精彩内容1月22日,树莓派基金会最新发布一款低成本、高性能的微控制器开发板Raspberry Pi Pico,新产品相比普通树莓
发表于 11-03 08:44
树莓派Pico的相关资料推荐
1月22日,树莓派基金会最新发布一款低成本、高性能的微控制器开发板Raspberry Pi Pico,新产品相比普通树莓派体积更小,售价仅4
发表于 02-07 07:37
在树莓派Pico上实现怀旧的AppleII仿真
树莓派Pico采用他自己的处理器RP2040,双核M0,133MHz。为了体验它的双核编程环境和性能,我用它来实现一个AppleII仿真,当然是在AppleWin代码基础上移植改造的。
发表于 05-24 20:58
树莓派也出MCU了?树莓派Pico来了!
关注、星标公众号,直达精彩内容1月22日,树莓派基金会最新发布一款低成本、高性能的微控制器开发板Raspberry Pi Pico,新产品相比普通树莓
发表于 10-28 10:36
•11次下载

树莓派Pico:仅4美元的MCU
1月22日,树莓派基金会最新发布一款低成本、高性能的微控制器开发板Raspberry Pi Pico,新产品相比普通树莓派体积更小,售价仅4
发表于 12-04 13:06
•13次下载
基于树莓派pico的可编程游戏手柄设计
方案介绍组件12x12x7.3mm 瞬时触觉按钮按钮树莓派Pico通用 D1286464 OLED 显示屏操纵杆模块 PS210 欧姆电阻 组装将树莓
发表于 12-26 15:10
•0次下载
树莓派PICO pio使用
在树莓派 Pico 小小的板子上总是能让我们发现一些惊喜。其所使用的RP2040芯片还具备8个可编程I/O(PIO)状态机,用于自定义外围设备
树莓派Pico Flash驱动踩坑记录
树莓派 pico 带有 2MB 的 Flash 资源,以下是我基于官方 Pico C/C++ SDK 对接 Flash 驱动时踩到的一些坑和解决办法。





 工商网监
工商网监
评论