 如何提取激光雷达的角点坐标
如何提取激光雷达的角点坐标
提取激光雷达的角点坐标
将激光雷达的rosbag转为pcd文件
- 打开pcdTransfer.launch
- 设置 rosbag路径
设置rosbag的数量
将rosbag以0.bag, 1.bag…命名。
<?xml version="1.0" encoding="UTF-8"?><launch> <param name="input_bag_path" value="$(find camera_lidar_calibration)/data/lidar/" /> <!-- rosbag folder --> <param name="output_pcd_path" value="$(find camera_lidar_calibration)/data/pcdFiles/" /> <!-- path to save new pcd files --> <param name="threshold_lidar" type="int" value="80" /> <!-- the limit of messages to transfer to the pcd file, 80 means maximum 80 messages of lidar --> <param name="data_num" type="int" value="12" /> <!-- the number of the rosbag --> <node pkg="camera_lidar_calibration" name="pcdTransfer" type="pcdTransfer" output="screen"></node >< /launch>
然后运行指令将rosbag批量转化成PCD文件,PCD文件默认保存在data/pcdFiles文件夹中
roslaunch camera_lidar_calibration pcdTransfer.launch
终端会逐渐的打印转换的过程,把上面录的文件逐个转换完就可以了

之后在pcdFiles文件夹中检查下,文件:
提取标定板角点坐标
然后使用pcl_viewer打开PCD文件,按住shift+左键点击即可获得对应的点坐标。
pcl_viewer -use_point_picking xx.pcd
选择标定板的角点,然后记录下它的坐标,注意这里记录顺序,之后要和照片的记录顺序保持一致,可以选择左上角开始,然后逆时针记录。
记录的时候在data文件夹下,新建一个corner_lidar.txt,安照下面的格式记录下来,格式一定要正确.
慢慢调下pcl_viewer的视角,然后shift+左键点击,在终端中会打印出该点的坐标,手动写入txt中按照格式
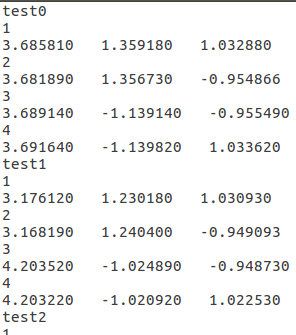
之后程序读取数据的时候,设置是这样的,每行数据只有超过10个字母程序才会将其读取为计算的参数,所以上面的数据中用来编号的1 2 3 4 和标题,test0 test1 是不会被读的。
程序读到空行就会停止读取参数开始计算,所以保存时不要空行,把雷达的角点全部标完之后,就可以提取照片中的角点像素了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
相机
+关注
关注
4文章
1370浏览量
53991 -
程序
+关注
关注
117文章
3798浏览量
81501 -
激光雷达
+关注
关注
969文章
4041浏览量
190544
发布评论请先 登录
相关推荐
激光雷达分类以及应用
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,
发表于 09-19 15:51
常见激光雷达种类
单线激光雷达特点:结构简单、扫描速度快、分辨率高、可靠性高、成本低。单线激光雷达实际上就是一个高同频激光脉冲扫描仪,加上一个一维旋转扫描。单线激光雷达虽然原理简单但是可以有效、高频的测
发表于 09-25 11:30
消费级激光雷达的起航
激光雷达仍各有其弊端:机械旋转式单线雷达无法探测低矮障碍物,稳定性受旋转部件影响,同时工业市场长期被国外激光雷达品牌把控,成本居高不下;多点(7-11点)拼接式
发表于 12-07 14:47
固态激光雷达
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-04 10:18
激光雷达
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-11 09:21
固态设计激光雷达
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
发表于 01-25 09:41
激光雷达的核心重要指标到底是什么?
供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标? 测距范围?采样率?精度? 只是水面上的冰山一角! 作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分
发表于 02-07 13:40
激光雷达除了可以激光测距外,还可以怎么应用?
简单的3D雷达,获取三维数据呢?目前市面上主流的有2种方式:1、采用线状激光器,将原先的一个点变成一条线型光;2、使用一个2D激光雷达扫描,同时在另一个轴进行旋转,从而扫描出3D信息;
发表于 05-11 15:33
机器人和激光雷达都不可或缺
问题,就是:给了机器人一双“眼睛”。 通过激光雷达,机器人可以向外界发射红外线光源,通过三角测距或者TOF成像原理对机器人进行定位,帮助机器人构建所在环境的高精度轮廓信息,辅助机器人。 通过观察这对CP
发表于 02-15 15:12
TOF激光雷达
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
发表于 06-07 00:03
激光雷达点云数据包含哪些信息
)、环境监测、城市规划等领域。激光雷达点云数据是激光雷达系统收集到的一系列三维空间坐标点,包含了丰富的空间信息。本文将介绍激光雷达





 工商网监
工商网监
评论