 采集激光雷达如何提取照片中的角点像素
采集激光雷达如何提取照片中的角点像素
提取照片中的角点像素
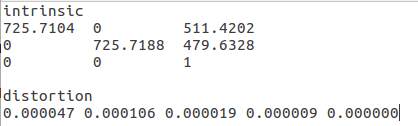
- 首先需要把最上面获得的相机内参畸变纠正参数以下图的格式保存在
data/parameters/intrinsic.txt文件下 - distortion下面对应5个畸变纠正参数,按顺序是k1和k2 (RadialDistortion),p1和p2 (TangentialDistortion),最后一个是k3,一般默认是0
配置cornerPhoto.launch文件中的照片路径:
<?xml version="1.0" encoding="UTF-8"?><launch> <param name="intrinsic_path" value="$(find camera_lidar_calibration)/data/parameters/intrinsic.txt" /> <!-- intrinsic file --> <param name="input_photo_path" value="$(find camera_lidar_calibration)/data/photo/1.bmp" /> <!-- photo to find the corner --> <param name="ouput_path" value="$(find camera_lidar_calibration)/data/corner_photo.txt" /> <!-- file to save the photo corner --> <node pkg="camera_lidar_calibration" name="cornerPhoto" type="cornerPhoto" output="screen"></node >< /launch>
运行
roslaunch camera_lidar_calibration cornerPhoto.launch
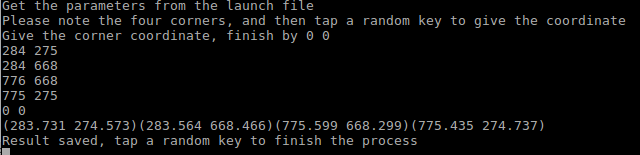
程序会在UI中打开对应的照片。在这个UI界面上只要把鼠标移到标定板的各个角上,窗口左下角就会显示对应的坐标数据。按照雷达采集的角点的顺序(左上角开始,逆时针),记录下四个角点坐标。比如:
284 275
284 668
776 668
775 275
记录完毕后选中显示的图片按任意键,进入坐标输入流程。把记录下的四个坐标”x y”按顺序输入,x和y中间要有空格(比如: “635 487”),输入完成后输入”0 0”即可结束输入流程(如下图例所示)。
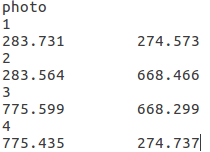
程序会算出四个更精确的float类型坐标显示出来,并保存在data/corner_photo.txt中。然后按任意键结束整个流程。
更改cornerPhoto.launch文件中的照片路径,重复上述流程,直至获得所有照片的角点坐标。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
像素
+关注
关注
1文章
205浏览量
18585 -
相机
+关注
关注
4文章
1350浏览量
53601 -
激光雷达
+关注
关注
968文章
3971浏览量
189904
发布评论请先 登录
相关推荐
激光雷达是自动驾驶不可或缺的传感器
。激光雷达的定位,我们通过 IMU、惯性导航系统、编码器和 GPS,得到一个预测的全局位置。当激光雷达实时扫描单次的点云数据后,我们会去结合单次的点云数据进行匹配,并进行特征
发表于 09-08 17:24
激光雷达分类以及应用
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,
发表于 09-19 15:51
常见激光雷达种类
单线激光雷达特点:结构简单、扫描速度快、分辨率高、可靠性高、成本低。单线激光雷达实际上就是一个高同频激光脉冲扫描仪,加上一个一维旋转扫描。单线激光雷达虽然原理简单但是可以有效、高频的测
发表于 09-25 11:30
消费级激光雷达的起航
激光雷达仍各有其弊端:机械旋转式单线雷达无法探测低矮障碍物,稳定性受旋转部件影响,同时工业市场长期被国外激光雷达品牌把控,成本居高不下;多点(7-11点)拼接式
发表于 12-07 14:47
固态激光雷达
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-04 10:18
激光雷达
`我们已经对单线激光雷达司空见惯,其旋转线扫的测量方式导致造成寿命问题和价格居高不下。 因此,北醒研发了CE30,它是一款具有大视场角的固态激光雷达。它可同时输出132°水平视场、9度垂直视场范围内
发表于 01-11 09:21
固态设计激光雷达
``一年一度的国际消费类电子产品展览会(CES)已经完满收官,短短的几天时间里,我们见识了Intel无人飞机灯光秀、百度无人车、移动行李箱等众多“黑科技”。而北醒不仅展示了性能卓越的固态激光雷达,在
发表于 01-25 09:41
激光雷达的核心重要指标到底是什么?
供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标? 测距范围?采样率?精度? 只是水面上的冰山一角! 作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。大部分
发表于 02-07 13:40
自动驾驶激光雷达新型探测器:近红外MPPC
image sensor在几百个点左右),三角测距速度居中,每秒在几百个到几千个点,脉冲测距法的测量速度最快,为每秒几万到几十万个点。因此,激光雷
发表于 09-10 14:21
TOF激光雷达
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
发表于 06-07 00:03
一种不依赖于棋盘格等辅助标定物体实现像素级相机和激光雷达自动标定的方法
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指
发表于 09-01 07:42
如何提取激光雷达的角点坐标
提取激光雷达的角点坐标 将激光雷达的rosbag转为pcd文件 打开pcdTransfer.launch 设置 rosbag路径 设置ros






 工商网监
工商网监
评论