 MoveIt的快速安装方法
MoveIt的快速安装方法
MoveIt的安装
安装moveit,如果不想挑战源码编译,MoveIt可以用apt-get快速安装,只需要输入:
$ sudo apt-get install ros-indigo-moveit-full
本系列博文将以一个双臂机器人为例,详细讲解基于MoveIt的使用方法,我为这个双臂机器人取名为:rob。
并在Solidworks中简单绘制了该机器人的三维模型,结构示意图如下:
Rob包含两个手臂,左右对称布局,每个手臂包含5个自由度,关节情况如下图所示。
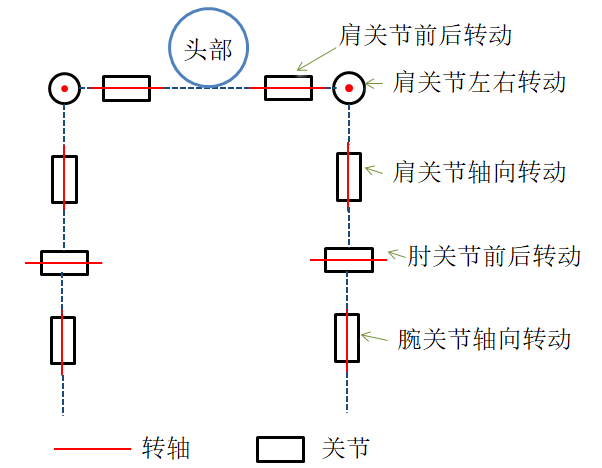
这种关节分布是仿人形的双臂机器人常用的手臂设置形式。
但这种结构并不能完全覆盖人手臂所有的自由度(人的手臂包含7个自由度)。
但用于说明 MoveIt 的使用已经足够了。
此外,各个关节的自由度范围如下表所示。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28850浏览量
209401 -
Linux
+关注
关注
87文章
11364浏览量
211034 -
ROS
+关注
关注
1文章
281浏览量
17210
发布评论请先 登录
相关推荐
使用moveit控制真实机械臂的方法
、 /status,这个方框里的全部就构成了一个action,这与下图的表述也是一致的。 2、moveit用了哪些action? 可以肯定的是,moveit!使用了不止一个action,每个action的名称就是
发表于 05-21 09:10



使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟
MoveIt 2 与 NVIDIA Isaac Sim 中模拟的机器人进行集成的过程。本教程需要一台安装了 Isaac Sim 2022.2.0 的电脑,以及如下所列的系统配置。请
虹科分享|如何防范MOVEit传输漏洞|高级威胁防御
美国网络安全和基础设施安全局(CISA)承认,它正在向几个联邦机构提供支持,这些机构在Progress(前身为IpSwitch)MOVEit传输解决方案中暴露出漏洞后被攻破。根据CISA发布的一份


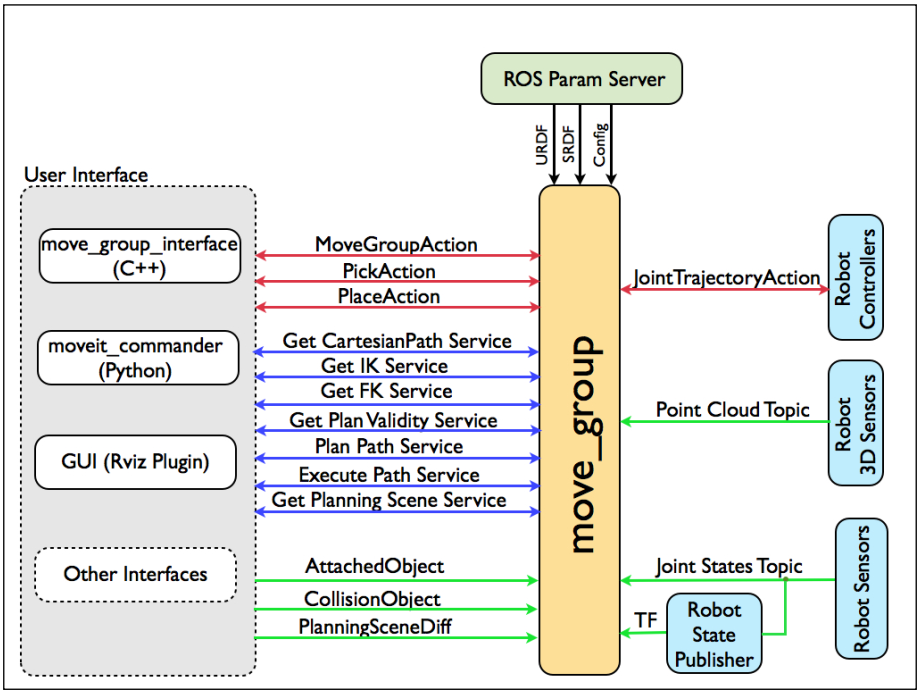
ROS系统的MoveIt模块介绍
机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!)。 其中,机械臂控制模块(后面简称MoveIt)可以让用户快速建立机械臂模型并实现机械臂的控制





 工商网监
工商网监
评论