 ROS模型建立常见错误
ROS模型建立常见错误
将 XACRO文件转换成 URDF 文件 并检查
转换的方法很简单,ROS封装了实现方法,我们只需进入xacro 所在的文件夹,然后键入如下命令即可:
rosrun xacro xacro.py rob.xacro > rob.urdf
为了检验我们的模型的准确性,我们进行简单的检查,在同一个目录下输入:
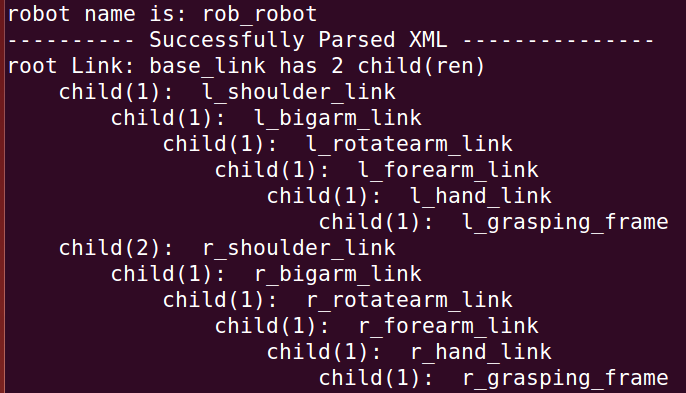
check_urdf rob.urdf
即可得到如下图显示,可以看到双臂的关节链接情况。
为了更直观的观看关节链接情况,我们在同一个目录下输入下面这行命令,就会得到 rob_robot.gv 和 file rob_robot.pdf 两个文件。
urdf_to_graphiz rob.urdf
5.在RViz中观看模型
编写 launch 文件,取名:description.launch ,内容如下:
< launch >
< arg name="model" / >
< !-- Parsing xacro and setting robot_description parameter -- >
< param name="robot_description" command="$(find xacro)/xacro.py $(find rob_description)/urdf/rob.xacro"/ >
< !-- Setting gui parameter to true for display joint slider -- >
< param name="use_gui" value="true"/ >
< !-- Starting Joint state publisher node which will publish the joint values -- >
< node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" / >
< !-- Starting robot state publish which will publish tf -- >
< node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" / >
< !-- Launch visualization in rviz -- >
< node name="rviz" pkg="rviz" type="rviz" args="-d $(find rob_description)/urdf/urdf.rviz" required="true" / >
< /launch >
输入命令:
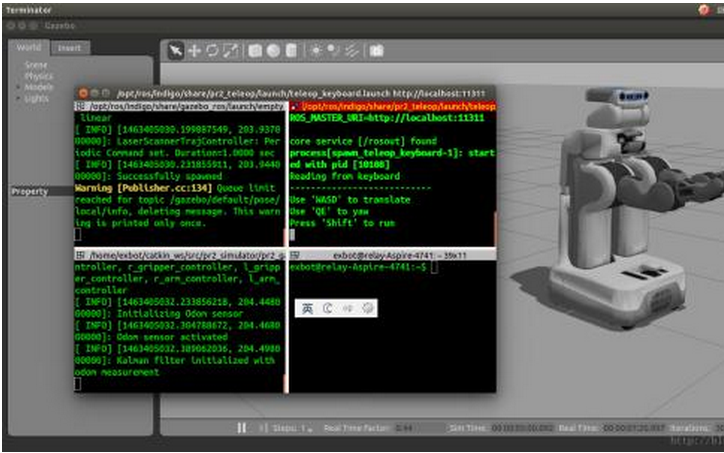
roslaunch rob_description description.launch
转动每个关节,检查无误后,模型建立完成,下一篇经介绍如何使用 MoveIt 控制 Rob 机器人。
Tips 建模常见错误
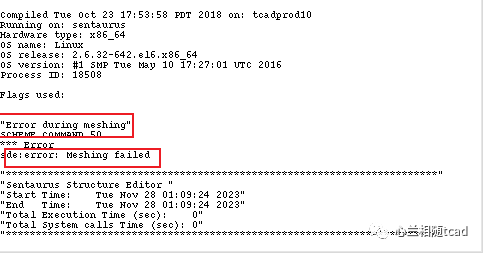
问题1:如果在查看模型时发现错误提示:No transform from [xxxx] to [base_link]
解决办法:出现这个错误首先要怀疑是你的xacro描述文件编写的格式出现了错误。
如头部多了空格、中间关键字拼写错误等,建议耐下心来逐行逐句检查语法。
问题2:源码中和xacro文件同一目录的 urdf.rviz 文件是什么作用?
答:所有的 .rviz 文件都是 Rviz 的配置文件,这里我们在launch 文件中制定了他的配置文件。
如果不指定Rviz 启动时会读取默认的配置文件,用户可以根据需求启动Rviz后在左上角工具栏上保存自己满意的配置文件。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28405浏览量
207016 -
模型
+关注
关注
1文章
3238浏览量
48824 -
ROS
+关注
关注
1文章
278浏览量
17006
发布评论请先 登录
相关推荐
ROS与RPLIDAR结合使用说明及问题汇总
`随着科学技术的不断发展,服务机器人等诸多智能产品逐渐进入人们的视线,不管是家庭中常见的扫地机器人、还是商场里的导购机器人,要让他们智能化的完成任务,智能移动与导航是不可或缺的关键技术。 ROS作为
发表于 09-07 16:27
labview建立veristand模型
are specified as parameters.指定为必需输入的终端是模型导入,建议和可选输入指定为参数。这是NI描述的labview在建立veristand模型时指定模型输
发表于 07-14 11:02
如何建立芯片模型数据?
最近抄板一电路,想仿真试试结果。结果第一步就卡住了,因为电路板上用了HV3-2405E这种芯片。在网上找不到这个芯片的库,个人建立元件模型,也卡在了模型数据上!向大神们求助,如何建立这
发表于 03-06 10:15
ROS机器人软件平台有哪些常用命令?ROS的常见命令详细资料免费下载
本文档的主要内容详细介绍的是ROS有哪些常用命令?ROS的常见命令详细资料免费下载。
发表于 09-13 08:00
•20次下载
基于深度学习模型的点云目标检测及ROS实现
近年来,随着深度学习在图像视觉领域的发展,一类基于单纯的深度学习模型的点云目标检测方法被提出和应用,本文将详细介绍其中一种模型——SqueezeSeg,并且使用ROS实现该模型的实时目
ROS部署PaddlePaddle的CV模型
paddle_inference_ros_demo功能包是基于paddle_inference_ros开发的,帮助开发者快速体验paddle_inference在ROS环境下的推理部署效果的功能包。可以直接进入该项目链接进行查看

ros1和ros2的通信模型
ros1: talker 注册 listener 注册 ROS Master 进行信息匹配 listener 发送链接请求 talker 确认请求 建立连接 talker 给 listener 发

vlookup常见的12种错误
中,我将介绍VLOOKUP函数的常见错误,并提供详尽、详实、细致的解决方法。 错误#N/A:这是最常见的VLOOKUP错误之一,它表示无法找





 工商网监
工商网监
评论