 TogetherROS目标检测运行方法
TogetherROS目标检测运行方法
接下来,我们就运行一个更为直观的案例——目标检测。
在这个案例中,需要大家找一个USB的相机,连接到旭日X3拍的USB接口上。
在运行这个例程之前,需要确认两点:
1.有一个USB相机已经连接到了旭日X3派板子上;
2.有一个HDMI的显示器也连接到了旭日X3派板子上,它主要用于显示后续的图像检测的效果。
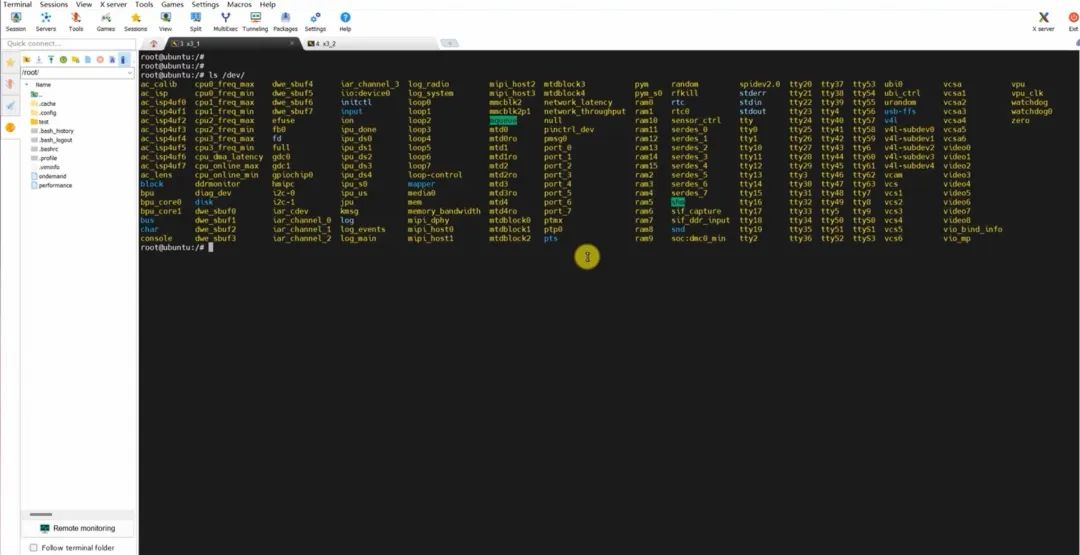
要确认USB相机已经正确连接到开发板,可以在终端输入命令“ls - dv“查看当前设备号,默认把USB相机识别为vedio8。
如果当前列表里能找到vedio8就说明相机被成功识别到了。
输入以下命令运行例程:
** cd /app/ai_inference/02_usb_camera_sample/ ** python3 ./usb_camera_fcos.py
代码第一行,02例程的功能是通过相机动态采集图像,并对图像里的目标物体进行实时识别。
代码第二行,我们用python3来运行例程usb_camera_fcos.py,它的目标识别的功能是通过我们板卡中CPU的AI引擎来实现的。
我们输入以上两行代码,就开始驱动相机、并对相机里的图像做动态识别了。
此时如果有连接HDMI的显示器,就可以在显示器里看到动态识别的效果。
我们可以调整USB相机镜头的范围,去拍一些杯子、电脑、显示器等等,都可以把对应的目标物体识别到,并把对应的物体用彩色框给框出来;
在框的左上角,就是识别到物体的名称、以及它识别的概率值了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208907 -
usb
+关注
关注
60文章
7992浏览量
266445 -
相机
+关注
关注
4文章
1370浏览量
53991 -
ROS
+关注
关注
1文章
281浏览量
17140
发布评论请先 登录
相关推荐
基于部件的自动目标检测方法研究
该文提出了一种新的自动目标检测算法,实现对自然场景图像及高分辨率遥感图像中结构相对复杂的人造目标的自动检测。该方法基于组成物体的几何部件处理
发表于 06-23 14:12
•14次下载

基于海天线提取的红外小目标检测方法
通过对海上红外图像进行分析,提出了一种基于海天线提取的红外小目标检测方法。该算法的基本思路是根据所需提取目标的特点,首先选择感兴趣的灰度区域,然后运用Canny算子进行
发表于 04-20 11:32
•43次下载

基于仿生视觉系统的运动目标快速检测方法
针对如何快速而精准地检测出运动目标问题,借鉴昆虫复眼在视觉信息处理上的独特技巧和原理,提出一种基于仿生视觉系统的运动目标快速检测方法,为确保
发表于 11-10 11:35
•6次下载

基于GPU的并行化运动目标检测方法的研究
在智能视频监控领域中,运动目标检测已经成为主要研究课题之一,针对传统的方向梯度直方图(HOG)算法并行化程度低等问题,采用了基于嵌入式GPU的并行化改进的运动目标检测
发表于 11-15 11:33
•7次下载

一种非静止背景下的运动目标检测方法
较好的运动补偿,并通过帧差分方法来提取视频序列中的运动目标。在现代有轨电车障碍物检测系统中运行的实验结果表明,该方法可以较好地消除运动
发表于 11-15 14:53
•8次下载

基于子矩阵波束的目标检测方法
针对同一单频带内未知目标检测中强、弱目标不能同时被检测问题,依据不同子矩阵波束形成输出直流响应值不同,提出一种基于子矩阵波束形成输出直流响应加权的目
发表于 11-28 15:23
•0次下载

目标检测EDA方法有哪些 eda和pcb的区别
目标检测(Object Detection)是计算机视觉领域中的重要任务,用于在图像或视频中定位和识别出多个感兴趣的对象。EDA(Enhancement, Detection, and Augmentation)方法是一种综合的
发表于 07-20 14:43
•1988次阅读
TogetherROS Bot相机驱动方法
TogetherROS™·Bot相机驱动 除此之外,TogetherROS™·Bot中也提供了USB摄像头的驱动节点,连接摄像头之后,直接设置设备的权限和TogetherROS的环境变量就可以使用了
基于深度学习的小目标检测
)的广泛应用,小目标检测的性能得到了显著提升。本文将详细探讨基于深度学习的小目标检测技术,包括其定义、挑战、常用方法以及未来发展方向。





 工商网监
工商网监
评论