 Pico W基于C/C++ SDK适配RT-Thread Wi-Fi经验总结
Pico W基于C/C++ SDK适配RT-Thread Wi-Fi经验总结
前言:
Pico W 作为 Raspberry Pi Pico 的衍生版本,主要增加了无线通信的功能,通过搭载 CYW43439 无线芯片,支持 2.4 GHz Wi-Fi 4 及蓝牙5.0 ,其余和 Raspberry Pi Pico 基本相同,外部引脚也相互兼容。
也可以参考我之前文章中介绍的使用 Clion 搭建开发调试下载环境,同样适用。这里需要注意的一点是,当你首次烧录使板载 LED 闪烁的程序时,开发板可能没有相应的现象,这可能不是你下载失败了,也不是你的开发板是坏的,而是 Pico W 的板载 LED 由无线模块控制
准备工作
开发环境搭建完成后,接下来就可以根据树莓派官方的 SDK 和 Example 调一调程序,逐渐梳理清楚逻辑和各模块之间的依赖关系。例如先运行一个最简单的 Wi-Fi scan 的示例程序,其主要逻辑是先 cyw43_arch_init() 初始化模块,再通过 cyw43_arch_enable_sta_mode() 使能为 STA 模式,最后使用cyw43_wifi_scan() 开始扫描并注册扫描完成回调函数打印扫描结果,整体的逻辑和 API 还是很简洁明了的。
开始开发
主要有以下三种类型:poll , threadsafe_background, freertos 。poll 是需要用户定期调用的,并且不保证线程安全性;threadsafe_background 和 freertos 能够保证线程安全性,threadsafe_background 不使用 RTOS,通过低优先级的 ISR 实现调度同步,freertos 是通过专门的线程处理调动同步。
一开始我选择的是基于 threadsafe_background 进行开发,通过参照以上 Cmake 关系图很快就成功在 RT-Thread 的 Bsp 中复现了 Wi-Fi scan 示例程序。但是开发后续需要使用 lwip 的功能时,与 RT-Thread 就产生了很多冲突。
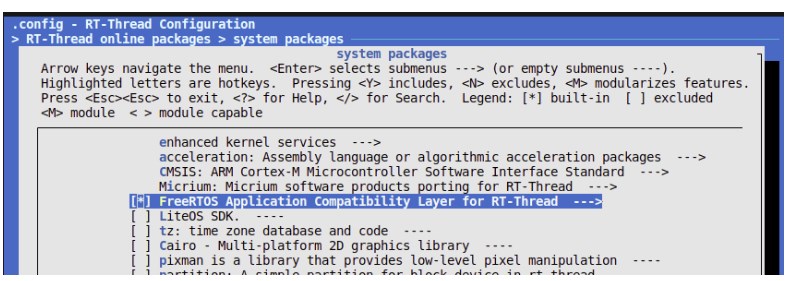
想要更好的适配 RT-Thread 还是得按照 RTOS 的来,于是开始复现官方提供的基于 FreeRTOS 的,首先想到的是使用 RT-Thread 的 FreeRTOS 兼容层软件包,在 menuconfig 中使能即可:
引入兼容层后大部分报错消失了,但报错没有 portCHECK_IF_IN_ISR 的相关实现,在 FreeRTOS 的源码中查找发现其为 RP2040 特有的实现。其是用于判断上下文环境是否处于中断中,改为 RT-Thread 中的检测中断 nest 是否大于 0 即可。
成功编译下载程序后,却因为定时器进入了 hardfault ,检查发现 FreeRTOS 兼容层中的 portMAX_DEALY 对接错了,不是 RT_TICK_MAX ,应该为 RT_TICK_MAX / 2 - 1(韦东山老师在rtt开发者大会上专门讲解过 RTT 优雅的定时器算法,感兴趣可以看看)这个问题目前已经修复了。
之后程序还是进入 hardfault ,一直 debug 对比代码没有发现问题,再次分析对比 FreeRTOS 和 RT-Thread 之间的差异,两者的优先级等级和数值的关系是相反的,检查发现 async_context_task 线程的优先级为 tskIDLE_PRIORITY + 4 在 FreeRTOS 中优先级比空闲线程高4,但在 RT-Thread 中因为优先级太低,得不到调度,造成死锁问题。解决办法是将其线程优先级提高。
移植 RT-Thread
以上的示例程序跑通以后,就开始将 wifi freertos 的相关的文件移植为 RT-Thread 。主要包含以下内容:
替换头文件:
用 RT-Thread 的头文件替换 FreeRTOS 的头文件。
修改任务创建和管理:
使用 RT-Thread 的任务创建和管理 API 替代 FreeRTOS 的任务 API。
注意 RT-Thread 的任务入口函数参数和返回值的差异。
修改互斥锁:
替换 xSemaphoreCreateRecursiveMutex 为 RT-Thread 提供的互斥锁创建 API。
替换 xSemaphoreTakeRecursive 和 xSemaphoreGiveRecursive 为 RT-Thread 互斥锁的 API。
替换定时器:
使用 RT-Thread 的软定时器或者实时时钟服务替代 FreeRTOS 定时器。
任务通知:
替换 FreeRTOS 的任务通知 API 为 RT-Thread 的事件和信号量等。
任务挂起和唤醒:
替换 FreeRTOS 的 vTaskSuspend 和 vTaskResume 为 RT-Thread 的任务挂起和唤醒 API
主要涉及 async_context_rtthread,cyw43_arch,cyw43_arch_rtthread,lwip_rtthread这些文件,基础的移植完成后,就可以开始将其对接到 RT-Thread 的 Wi-Fi 设备驱动框架了,主要参考 rw007 和 cyw43012-RTT 的对接。需要使能 RT-Thread 的 lwip 和 SAL 等组件。
需要注意的一点是 RT-Thread 的 lwip 组件使能后,已经包含了 lwip 的初始化,cyw43_arch_init() 中的 lwip 初始化相关注释即可,否则重复初始化会因为完成量无法获取造成阻塞。
#if CYW43_LWIP
// ok &= lwip_rtthread_init(context);
#endif
// 重复初始化信号量无法获取造成阻塞
bool lwip_rtthread_init(async_context_t *context) {
RT_ASSERT(!lwip_context);
lwip_context = context;
static bool done_lwip_init;
if (!done_lwip_init) {
done_lwip_init = true;
rt_sem_t init_sem = rt_sem_create("lwip_init_sem", 0, RT_IPC_FLAG_PRIO);
tcpip_task_blocker = rt_sem_create("tcpip_task_blocker", 0, RT_IPC_FLAG_PRIO);
tcpip_init(tcpip_init_done, init_sem);
// 阻塞在信号量获取
rt_sem_take(init_sem, RT_TICK_MAX / 2 - 1);
rt_sem_delete(init_sem);
} else {
rt_sem_release(tcpip_task_blocker);
}
return true;
}
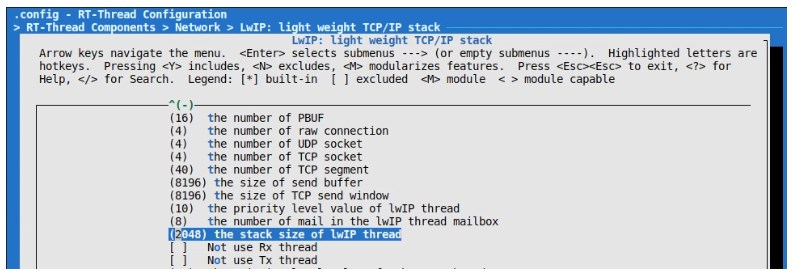
运行过程中可能会报错提示 lwip 线程栈空间不足,在 menuconfig 中适当改大即可
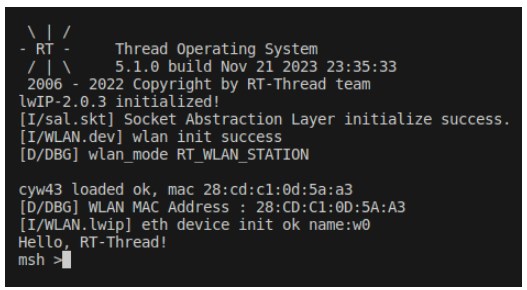
对接完成后测试功能,使能为 STA 模式,日志中显示 mac 地址
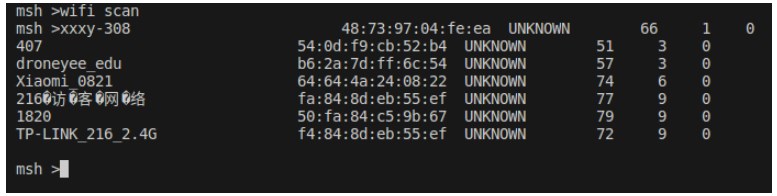
扫描附近ap
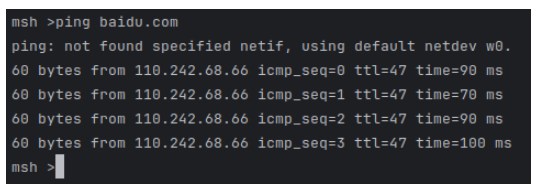
连接ap并成功ping通
测试ap功能,使能为AP模式,设置名称及pwd,可以使用手机成功连接。
注意事项
使用pico w的无线模块需要使用一些相关的宏定义,如无线模块的引脚定义等,其定义在 picow.h 中。但程序默认包含的是 pico.h 。可以通过定义宏 PICO_CONFIG_HEADER=boards/pico_w.h 进行切换。
吞吐量还未进行测试。
目前基于 C/C++ SDK 的开发案例较少,推荐直接阅读官方文档。
在对接设备驱动框架 wifi_join 方法时苦恼于 ap 的 channel 和 bssid 没有正常传递,查看源码发现使能 RT_WLAN_JOIN_SCAN_BY_MGNT
这个宏可以先扫描ap,并传递包含 channel 和 bssid 的 info,但要将以下改为rt_memcpy
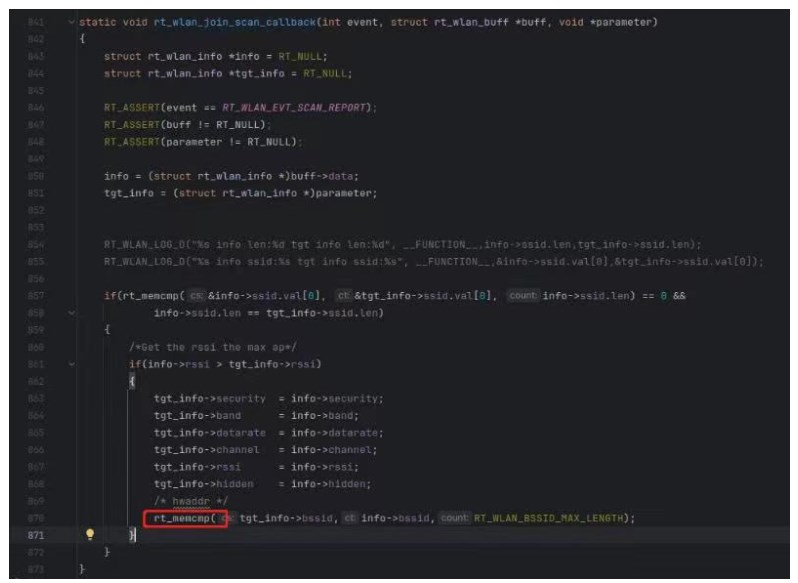
个人理解,没有找到其他的说明和用例。(不过最后发现,连接ap没有 channel 和 bssid 也行,直接设置为 RT_NULL )
-
无线通信
+关注
关注
58文章
4565浏览量
143500 -
LED控制
+关注
关注
0文章
39浏览量
16903 -
Wi-Fi技术
+关注
关注
0文章
58浏览量
8372 -
RT-Thread
+关注
关注
31文章
1285浏览量
40093
发布评论请先 登录
相关推荐
BL808 RT-Thread Wi-Fi 驱动适配
RT-Thread的C语言编码规范
BL808 RT-Thread Wi-Fi驱动适配
【每日精选】开源鸿蒙系统DAYU200教程及Tina Wi-Fi模组移植
RT-Thread实战笔记资料汇总
【BPI-Pico-RP2040 开发板】+Pico运行RT-Thread
嵌入式 | 如何在搭载了RT-Thread系统的STM32平台上使用C++?
如何使用在搭载了RT-Thread系统的STM32平台上使用C++

如何在搭载了RT-Thread系统的STM32平台上使用C++?

2022 RT-Thread全球技术大会:萤石EZIOT SDK对RT-Thread的支持
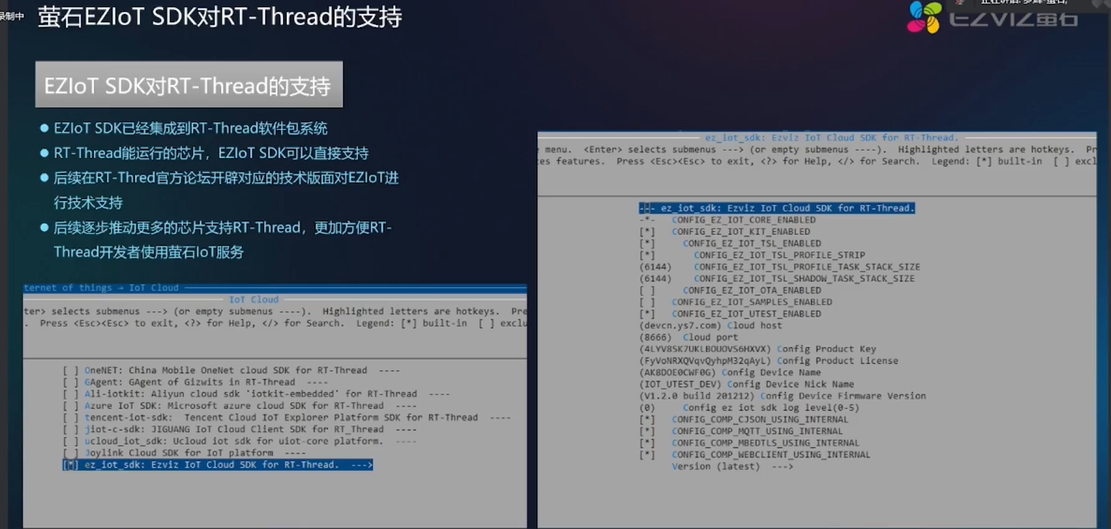
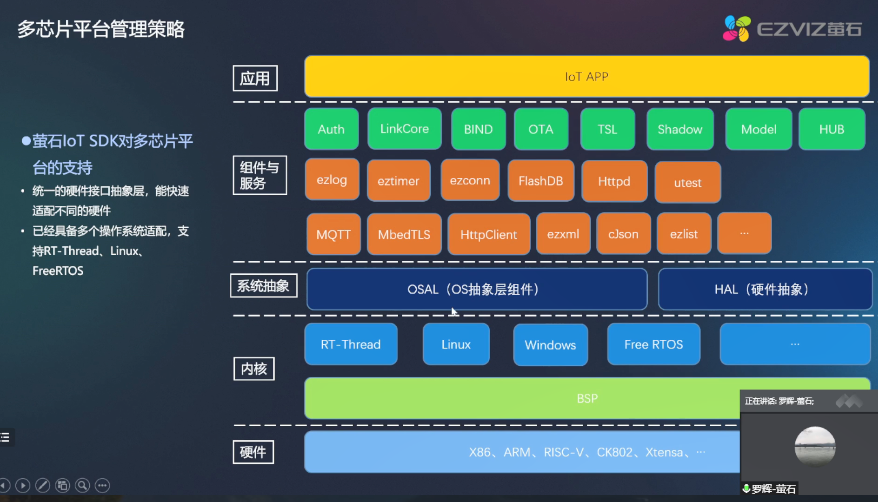
RT-Thread全球技术大会:萤石EZloT SDK对RT-Thread的支持以及多芯片平台管理策略
【经验总结】一位近10年的嵌入式开发老手,到底是如何快速学习和使用RT-Thread的?






 工商网监
工商网监
评论