 HT for Web (Hightopo) 使用心得(5)- 动画的实现
HT for Web (Hightopo) 使用心得(5)- 动画的实现
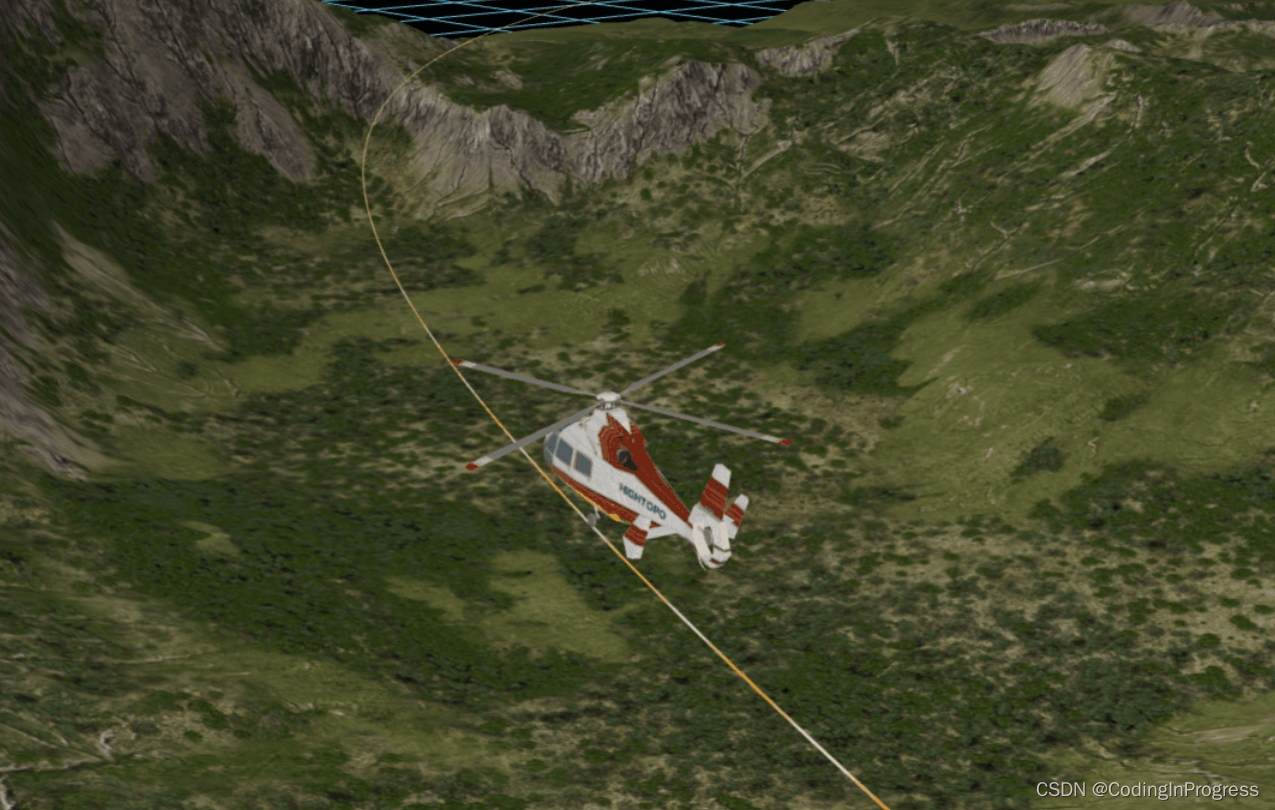
其实,在 HT for Web 中,有多种手段可以用来实现动画。我们这里仍然用直升机为例,只是更换了场景。增加了巡游过程。
使用 HT 开发的一个简单网页直升机巡逻动画(Hightopo 使用心得(5))
这里主要用到的动画实现方式有三种:
ht.Default.startAnim()
DataModel.addScheduleTask(task)
场景搭建
具体3D场景的相关概念请参考《Hightopo 使用心得(4)- 3D 场景 Graph3dView 与 Obj 模型》。
这里的主要工作分为:3D 场景配置以及模型加载。其中 3D 场景部分的设置代码如下:
this.g3d = new ht.graph3d.Graph3dView();
this.g3d.setGridVisible(true);
this.g3d.setGridSize(5000);
this.g3d.setGridGap(2000);
this.g3d.setNear(10)
this.g3d.setFar(10000000)
this.g3d.addToDOM();
this.dataModel = this.dm = this.g3d.dm();
为了给直升机搭建一个逼真的环境。这里我们增加了一个山体模型。另外,由于直升机机体与螺旋桨模型是分开的,因此需要分别加载并调整其位置让二者合并成一个模型。
// 加载山体模型
this.mountains = await this.createObj(MODELS.MOUNTAINS.name, MODELS.MOUNTAINS.obj, MODELS.MOUNTAINS.mtl);
this.mountains.s('3d.selectable',false);
this.mountains.s('shape3d.scaleable',true);
this.mountains.setScale3d([0.01, 0.1, 0.01]);
this.mountains.setElevation(1800); // 让山体在地面以上
// 分别加载直升机及螺旋桨模型
this.helicopterNode = await this.createObj(MODELS.HELICOPTER.name, MODELS.HELICOPTER.obj, MODELS.HELICOPTER.mtl);
this.propellerNode = await this.createObj(MODELS.PROPELLER.name, MODELS.PROPELLER.obj, MODELS.PROPELLER.mtl);
// 由于默认创建 Node 的时候,其锚点是在 [0.5, 0.5, 0.5],位置是在 [0, 0, 0]。导致模型并不在水平面以上。
let size3d = this.helicopterNode.getSize3d(); // 获取直升机模型的 [长,宽,高]
let height = size3d[1]; // 获取模型高度
this.helicopterNode.setPosition3d([0, height/2, 0]); // 将直升机放到地面上
this.propellerNode.setRotation3d([0.10506443461595279, 4.550746858974086, -0.007825951889059535]); // 让螺旋桨水平
this.propellerNode.setPosition3d([0, 215, -99.00152946490829]); // 将螺旋桨放到直升机上
this.propellerNode.setHost(this.helicopterNode); // 螺旋桨吸附到直升机上
this.helicopterNode.p3(0,2000,0); // 直升机

螺旋桨动画 - setInterval
螺旋桨动画比较简单,我们在《Hightopo 使用心得(4)- 3D 场景 Graph3dView 与 Obj 模型_CodingInProgress的博客-CSDN博客》中已经提过。其本质是通过不断地修改螺旋桨节点在竖直方向(Y 轴)的角度。
/**
* 螺旋桨旋转动画
*
*/
startPropellerAnim(node) {
setInterval(() => {
const r3 = node.getRotation3d();
node.setRotation3d([r3[0], r3[1] + 0.4, r3[2]]); // 绕 Y 轴旋转
}, 20);
}
创建直升机巡游路径
有了直升机及环境,我们需要让直升机动起来。例如在这里,我们计划让直升机围绕山体巡逻。这里该如何实现呢?
在 HT for Web 官方手册中,其提供了一种实现方式,我们这里稍微加以改造便可让直升机围绕山体巡逻。
在代码层面,我们创建了一条三维线段(Polyline)。该线段实现的是一个圆环,悬浮在山体上面。有了这条路径,直升机便可沿着该路径前进实现巡游动画。
polyline的形状主要由points和segments这两个属性描述。二者都是数组。其中 points 可以理解成组成 polyline 所要用到的点集合,而 segments 数组主要用来定义如何使用前面的点来组成 polyline。
points 中的每一项为 {x,y,e} 格式,需要注意的是,这里代表高度的是 e(elevation),而不是 y。
segments 数组里面有5种值。分别为:
1: moveTo,占用1个点信息,代表一个新路径的起点
2: lineTo,占用1个点信息,代表从上次最后点连接到该点
3: quadraticCurveTo,占用2个点信息,第一个点作为曲线控制点,第二个点作为曲线结束点
4: bezierCurveTo,占用3个点信息,第一和第二个点作为曲线控制点,第三个点作为曲线结束点
5: closePath,不占用点信息,代表本次路径绘制结束,并闭合到路径的起始点
/**
* 创建直升机巡游路径
*
* @memberof Index3d
*/
createPath() {
this.g3d.setDashDisabled(false); // 显示虚线
let height = 2000; // 线段离地高度
let dataModel = this.dataModel;
let polyline = this.polyline = new ht.Polyline();
polyline.setThickness(5); // 线段粗细
polyline.s({
'shape3d.image': 'assets/flow.png', // 贴图
"shape3d": "cylinder", // polyline类型,这里是圆柱。也可以是
'repeat.uv.length': 400, // 贴图宽度
'shape3d.resolution': 1600, // 管线分辨率,分辨率越高越平滑
});
dataModel.add(polyline);
// 起始点
const points = [{
x: -15000,
y: 0,
e: height,
}];
const segments = [1];
// 二次曲线,占用两个点。生成一条弧线。下同。
points.push({
x: -15000,
y: -15000,
e: height
});
points.push({
x: 0,
y: -15000,
e: height
});
segments.push(3);
points.push({
x: 15000,
y: -15000,
e: height
});
points.push({
x: 15000,
y: 0,
e: height
});
segments.push(3);
points.push({
x: 15000,
y: 15000,
e: height
});
points.push({
x: 0,
y: 15000,
e: height
});
segments.push(3);
points.push({
x: -15000,
y: 15000,
e: height
});
points.push({
x: -15000,
y: 0,
e: height,
});
segments.push(3);
polyline.setPoints(points);
polyline.setSegments(segments);
polyline.setAnchorElevation(0)
}
直升机巡游动画 - ht.Default.startAnim
接下来,我们需要让直升机沿着巡游路径前进。在实现的时候,我们使用了 ht.Default.startAnim() 方法。该方法我们在前几篇文章中都用过,这里就不再详细介绍。
ht.Default.startAnim() 会执行 duration 毫秒,在执行过程中,其会自动计算所需要的帧数并在每一帧都调用一次action 方法。也就是说,如果我们想让直升机 40 秒围绕路径飞行一圈,我们只需要将 duration 设置成40*1000 毫秒,并且在每一帧拿到当前时刻 polyline 上的点的坐标及方向。同时,使用该坐标与方向设置直升机位置及朝向就可以实现巡游动画。
这里面比较关键的一个方法是 g3d.getLineOffset(polyline, length * v) 。该方法会返回一个对象:{point: p.M…h.Vector3, tangent: p.M…h.Vector3}。其分别代表当前时刻 polyline 上的点的坐标及放向。根据这两个值,我们可以进一步配置直升机的位置和朝向。
/**
* 直升机沿着巡游路径飞行
*
* @param {number} [duration=40 * 1000]
* @memberof Index3d
*/
startFly(duration = 40 * 1000) {
const {
g3d,
polyline
} = this;
/** 获取巡游路径总长度 */
let length = g3d.getLineLength(polyline);
const params = {
delay: 0,
duration,
easing: (t) => {
return t;
},
action: (v, t) => {
let offset = g3d.getLineOffset(polyline, length * v),
point = offset.point,
px = point.x,
py = point.y + 200, // 让直升机高于polyline
pz = point.z,
tangent = offset.tangent,
tx = tangent.x,
ty = tangent.y,
tz = tangent.z;
this.helicopterNode.p3(px, py, pz);
this.helicopterNode.lookAt([px + tx, py + ty, pz + tz], 'back'); // 一个模型有6个面,这里需要确定机头处于哪个面
// 视角盯住直升机
if (this._cameraType == 1) {
g3d.setCenter(px, py, pz);
} else if (this._cameraType == 2) { // Camera跟随直升机运动
g3d.setEye(px - tx * 1800 + 1000, py - ty * 1800 + 1000, pz - tz * 1800); // 让镜头高于直升机并在尾部进行观察
g3d.setCenter(px, py, pz);
}
this.helicopterNode.a('angle', v * Math.PI * 120);
},
finishFunc: () => {
ht.Default.startAnim(params);
}
};
ht.Default.startAnim(params);
}
管道流动动画 - DataModel.addScheduleTask()
实现管道流动的动画有多种方式,其本质是定期改变管道的贴图偏移。
这里我们采用DataModel#addScheduleTask(task)实现流动动画。DataModel#addScheduleTask(task)实际上是添加了一个调度任务。由于该方法是在 DataModel 上执行,因此在每次执行的时候,DataModel 里面的每个 Data 都会被调用。我们可以在 action 参数里面对 Data 进行过滤。DataModel#addScheduleTask(task)方法的参数task为json对象,可指定如下属性:
interval:间隔毫秒数,默认值为10
enabled:是否启用开关,默认为true
beforeAction:调度开始之前的动作函数
action:间隔动作函数,对DataModel上的每个data节点都会执行一次action操作
afterAction:调度结束之后的调度函数
另外,可以用DataModel#removeScheduleTask(task)删除调度任务,其中task为以前添加过的调度任务对象。
/**
* 通过DataModel的addScheduleTask实现流动效果
*
* @memberof Index3d
*/
addScheduleTasks() {
const task = {
interval: 50, // 间隔毫秒数,默认值为10
enabled: true, // 是否启用开关,默认为true
beforeAction: () => {}, // 调度开始之前的动作函数
afterAction: () => {}, // 调度结束之后的调度函数
action: (data) => { // 间隔动作函数,对DataModel上的每个data节点都会执行一次action操作
if (data.getClassName() == 'ht.Polyline') {
const offset = (data.s('shape3d.uv.offset') || [0,0]);
data.s('shape3d.uv.offset', [offset[0] + 0.1, offset[1]]);
}
}
};
this.dataModel.addScheduleTask(task);
// this.dataModel.removeScheduleTask(task); // 删除调度任务
}
这里我们只是举例介绍一下DataModel#addScheduleTask(task)的用法。对于一个 DataModel 中大部分 Data 都需要动画的时候,可以考虑使用该方法。
在代码执行的时候,我们可以选择把巡游路径隐藏。这样看起来直升机就是沿着一个圆形持续巡游。
hidePath() {
this.polyline.s('3d.visible', false);
}
总结
本文介绍了如何通过代码实现一个直升机绕山巡游的动画,包括创建路径和实现直升机的飞行动画。另外,还介绍了如何通过DataModel#addScheduleTask(task)实现流动效果的动画。读完本文,你将了解到如何使用 HT for Web 实现各种动画效果。
审核编辑 黄宇
-
数字孪生
+关注
关注
4文章
1342浏览量
12330
发布评论请先 登录
相关推荐
HT for Web (Hightopo) 使用心得(1)- 基本概念

HT for Web (Hightopo) 使用心得(3)- 吸附与锚点
HT for Web (Hightopo) 使用心得(4)- 3D 场景 Graph3dView 与 Obj 模型
TFT LCD使用心得
详细谈谈TFT LCD 的使用心得
合泰单片机使用心得 (转)

智慧服装工厂电子看板试用心得

使用Raspberry Pi和Arduino实现Web控制的LED动画
HT for Web (Hightopo) 使用心得(2)- 2D 图纸、节点、连线 与基本动画
HT for Web并力ARMxy工业计算机实现数字化转型可视化解决方案





 工商网监
工商网监
评论