 基于FPGA的平衡小车设计
基于FPGA的平衡小车设计
一. 硬件介绍
底板资源:
MPU6050陀螺仪
WS2812 RGB彩色灯 * 4
红外接收头
ESP-01S WIFI
核心板
电机采用的是平衡小车之家的MG310(GMR编码器)电机。底板上有两个TB6612芯片,可以驱动四个电机,除了做平衡小车之外,也可以用来作为四驱车的底板,非常nice,同时支持两种控制方式,推荐通过红外遥控进行控制,实现起来非常简单,红外遥控器也非常便宜。
二. RTL 介绍
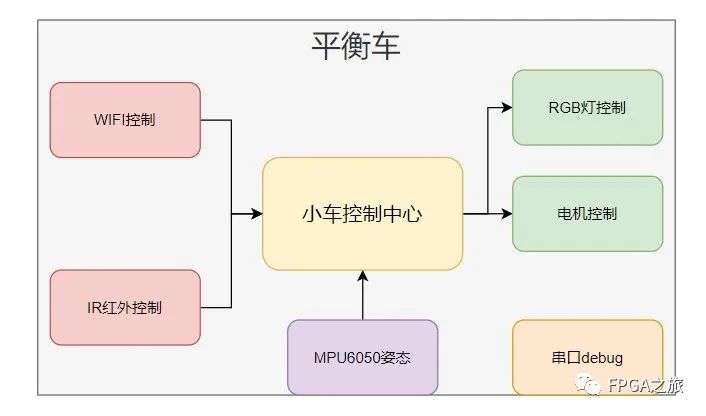
本次设计分为三大部分: MPU6050姿态解算 , 电机驱动(PWM+编码器) , 平衡控制,遥控器控制的模块另外算。其中MPU6050姿态解算为设计的核心,解算出来的角度越稳,平衡控制就越容易,小车也就越稳定。平衡控制其核心是调节PID的参数,参数调的好,小车没烦恼。
这里只对框架上做一个简单的介绍
整体架构如下
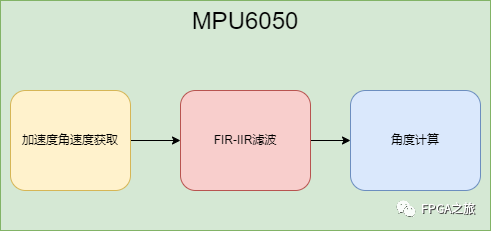
1. MPU6050姿态解算
模块数据流如下图所示,将获取到的角度进行一个8阶的FIR滤波,加速度进行一个2阶的IIR滤波,即可得到相对平滑一点的数据,然后经过Cordic算法进行姿态解算,即可得到roll和pitch角度,为了得到更加平滑一点的roll和pitch数据,这里将得到的角度再进行了一个1阶的均值滤波(本来使用的是3阶的均值滤波,但是相位延时有点大,所以修改为1阶的了)
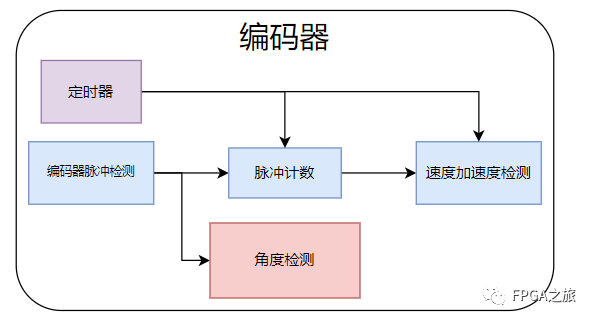
2. 电机驱动(PWM+编码器)
框图如下,在实际使用的时候,只使用了速度的检测,角度检测这部分功能就去掉了,PWM生成模块另算,这部分的代码是比较简单的,就不作过多的说明了。
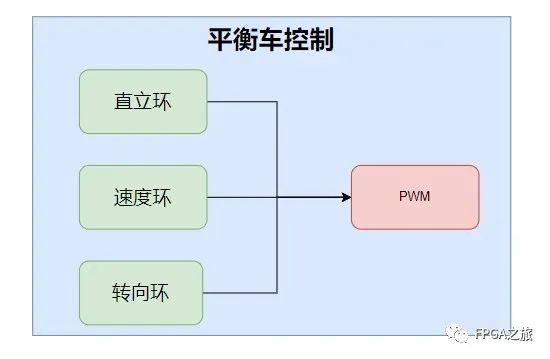
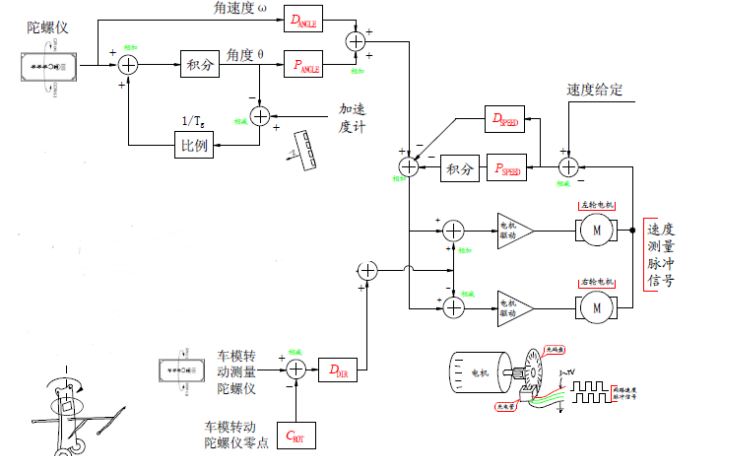
3. 平衡控制
平衡车的控制采用三环: 直立环、速度环、转向环,来进行控制,直立环采用的是PID进行控制,速度环采用的是PI进行控制,而转向环由于yaw在MPU6050解算的时候,误差较大,所以没有使用PID来进行控制转向的速度,而是直接输出的两轮的速度差进行控制。框图如下,三环通过PID进行调节后,相加得到最终的PWM值进行输出。三5环的具体实现可以参考开源的平衡小车C语言实现,所以难点不在代码实现上,而在于PID的调参上面,没有经验且没有人指导的情况下,那简直是噩梦,如果长时间没有调好的话,容易怀疑是不是小车的结构有问题(但小车的结结构一般是没有问题的,哈哈哈)。
4. 遥控控制
本来想使用低成本高效率的红外遥控来对小车进行控制的,但是出现了意外,接收到的红外遥控值不稳定,按同一个按键,接收到值居然不一样。没办法,还好弄了个esp-01S,可以通过tcp进行连接,之前弄四轴飞机的有程序,可以拿来直接使用,美滋滋。
三. 总结
FPGA平衡小车的基本架构就已经介绍完了,很多模块在都已经实现过,拿来通过简单的修改就可以直接用了,代码实现上还是比较轻松的,难点在于PID的调参上,也是花了非常多的时间。
速度环,还是有点问题,能力时间有限, 没有调好(ಥ﹏ಥ),希望后面有时间了可以接着调。
来源:FPGA之旅
-
FPGA
+关注
关注
1634文章
21830浏览量
608035 -
陀螺仪
+关注
关注
44文章
798浏览量
99150 -
开发板
+关注
关注
25文章
5203浏览量
98954 -
驱动芯片
+关注
关注
13文章
1322浏览量
55174 -
平衡小车
+关注
关注
1文章
39浏览量
12568
原文标题:FPGA实现平衡小车
文章出处:【微信号:FPGA研究院,微信公众号:FPGA研究院】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自平衡小车电机的选择
stm32制作平衡小车问题?
基于STM32的双轮平衡小车设计
两轮自平衡小车自主设计
STM32平衡小车的平衡原理详细介绍和程序及算法的概述免费下载






 工商网监
工商网监
评论