 永磁同步电动机—最大转矩电流比控制
永磁同步电动机—最大转矩电流比控制
1
前言
永磁同步电动机的矢量控制,在转矩解耦阶段,往往采用id=0的方式,此时转矩与dq轴电流解耦,具有计算简单的特点。
然而在这种控制方式下,由于d轴电流恒定,没有参与到控制中,忽略了磁阻转矩的作用,使得逆变器的容量没有得到充分发挥,因此这种方法不适用于凸极永磁同步电动机控制系统。且由于永磁体磁链基本不变,因此只能满足基速以下的调速策略。
因此,本文介绍一种新的d轴电流也参与控制的最大转矩电流比(Maximum Torque Per Amphere,MTPA)控制。这种方法只需要最小的定子电流,能够降低线路损耗,提高整体系统的工作效率。
2
转矩解耦
MTPA与id=0控制方式均是体现在转矩解耦上的,因此它的控制系统结构与id=0基本一致,区别仅在于转矩对电流解耦方式的不同。
2.1 最大转矩电流比
最大转矩电流比,顾名思义,就是一种转矩与电流矢量的比值为最大的一种控制方式。即在输出相同转矩条件下,电流最小。
结合前文提到过的转矩公式,那么目标就是:

根据上述的目标,通过一系列推导,可以求得转矩与q轴电流的关系,及q轴电流与d轴电流的关系,如下所示:

通过第一个公式,可以通过转矩,求得q轴电流,
通过第二个公式,可以通过q轴电流,求得d轴电流。
这里有两点说明:
1)上述公式虽然表示出了电机转矩与定子电流的关系,但是必须反求出以Te为变量的id与iq的表达式,这个求解过程比较复杂,可以将转矩与dq轴电流的关系制成表格,通过查表并进行曲线拟合的方法来求解这个问题。
2)另外,由于表面式永磁同步电动机的各向磁路对称,没有磁阻转矩,交直轴电感相等(Ld=Lq),因此表面式永磁同步电动机的最大转矩电流比控制与id=0的控制策略完全相同。
MATLAB画个图,大家可以直观感受下凸极PMSM的MTPA与id=0控制的区别。

图中横纵坐标分别为dq轴电流,红色虚线为恒转矩曲线。
可以看出:若想要电动机输出相同的转矩,采用id=0的控制方式时,电流矢量为OA,MTPA控制时,电流矢量为OB。明显看出OB长度小于OA,即MTPA控制下,所需要的定子电流最小。
2.2 良心公式推导
下面是最大转矩电流比的推导过程,喜欢的可以学习,不喜欢的可直接忽略。先看个矢量图:

图中γ为定子电流的相位角,根据电流矢量关系式,有:

1)把上式带入到电动机转矩公式可得:

2)关于电流相位角的转矩与电流的比值公式为:

3)对上述公式对电流相位角求导可得:

4)令上式为零可以求出电机转矩与定子电流比值最大时的电流相位角:

可以解得:

进而有:

把 带入到上式就可以得到前文给出的id与iq的表达式了。完成!!!
带入到上式就可以得到前文给出的id与iq的表达式了。完成!!!
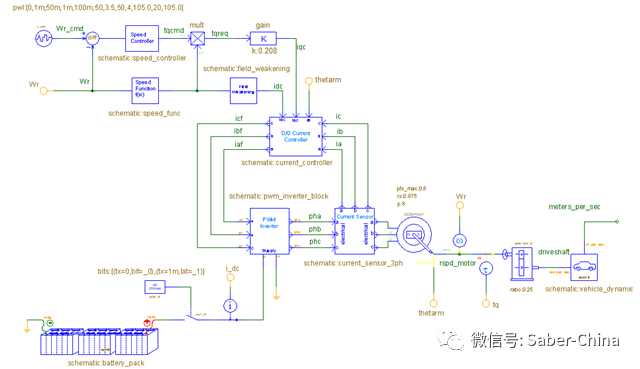
最后附上一个最大转矩电流比控制系统的结构图:

-
PMSM
+关注
关注
14文章
244浏览量
41823 -
永磁同步电动机
+关注
关注
14文章
74浏览量
12048 -
最大转矩电流比
+关注
关注
0文章
2浏览量
1534
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论