 Linux读写锁逻辑解析—Linux为何会引入读写锁?
Linux读写锁逻辑解析—Linux为何会引入读写锁?
一、Linux为何会引入读写锁?
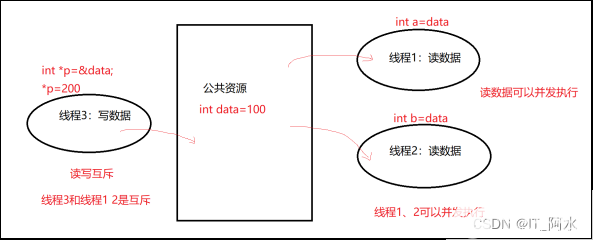
除了mutex,在linux内核中,还有一个经常用到的睡眠锁就是rw semaphore(后文简称为rwsem),它到底和mutex有什么不同呢?为何会有rw semaphore?无他,仅仅是为了增加内核的并发,从而增加性能而已。Mutex严格的限制只有一个thread可以进入临界区,但是实际应用中,有些场景对共享资源的访问可以严格区分读和写的,并且是读多写少,这时候,其实多个读的thread同时进入临界区是OK的,使用mutex则限制一个线程进入临界区,从而导致性能的下降。
本文会描述linux5.15.81中读写锁的数据结构和逻辑过程。
二、如何抽象读写锁的数据结构?
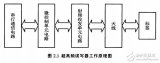
下图可以抽象rwsem相关的数据结构:
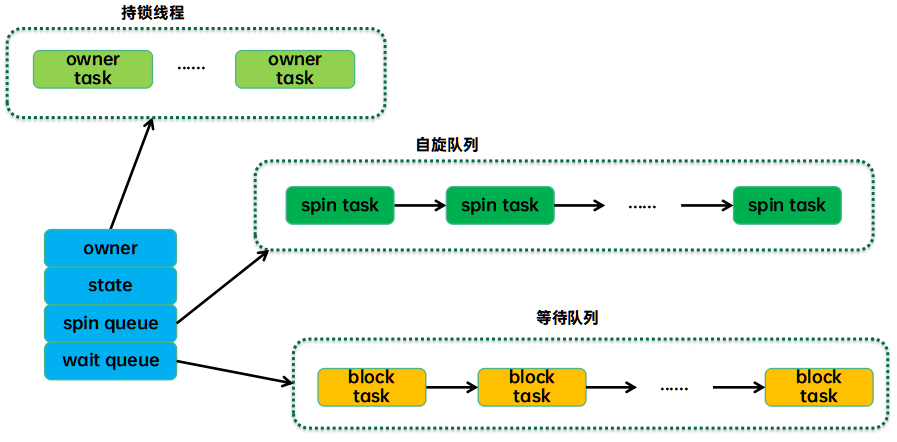
一个rwsem对象需要记录两种数据:
1、读写锁的状态信息
2、和该读写锁相关的任务信息
我们先看看读写锁的状态。读写锁状态字需要分别记录读锁和写锁的状态:由于多个reader可以同时处于临界区,所以对于reader-owned的场景,读锁状态变成了一个counter,来记录临界区内reader的数量,counter等于0表示读锁为空锁状态。对于writer,其行为和互斥锁一致,因此其写锁状态和mutex一样,仍然使用一个bit表示。
和读写相关的任务有两类,一类是已经持锁的线程(即在临界区的线程),另外一类是无法持锁而需要等待的任务。对于writer持锁情况,由于排他性,我们很清楚的知道是哪个task持锁,那么一个task struct指针就足够了记录owner了。然而对于读侧可以多个reader进入临界区,那么owner们需要组成一个队列才可以记录每一个临界区的reader。
不过在实际的rwsem实现中,由于跟踪owner们开销比较大,因此也是用一个task struct指针指向其一。具体linux代码是这样处理的:reader进入的时候会设置owner task,但是离开读临界区并不会清除task指针。这样,实际上对于读,owner task应该表示该任务曾经拥有该锁,并不表示是目前持锁的owner task,也有可能已经离开临界区,甚至该任务已经销毁。
如果持锁失败,无法进入临界区,我们有两种选择:
1、乐观自旋
2、挂入等待队列
两种选择各有优点和缺点,总结如下:

在5.15的内核中,只有在write持锁路径上有乐观自旋的操作,reader路径没有,只有偷锁的操作。当乐观自旋失败后就会挂入等待队列,阻塞当前线程。(乐观自旋功能有一个很有意思的发展过程,从开始支持writer的乐观自旋,到支持全场景的乐观自旋,然后又回到最初,有兴趣可以查阅内核的patch了解详情)
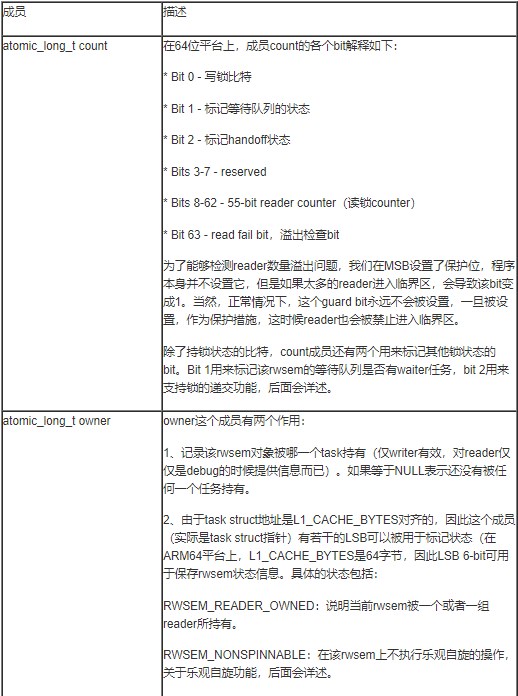
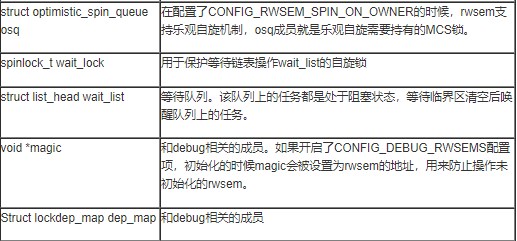
在了解了rwsem的基本概念之后,我们一起来看看struct rw_semaphore数据结构,其成员描述如下:
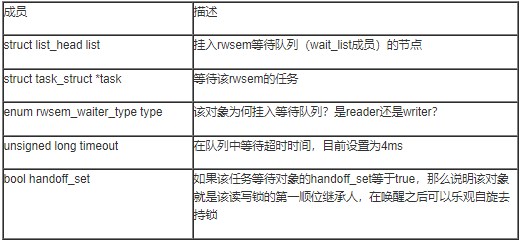
由于是sleep lock,我们需要把等待的任务挂入队列。在内核中,struct rwsem_waiter用来抽象等待rwsem的任务,其成员描述如下:
Rwsem模块的外部接口API如下:
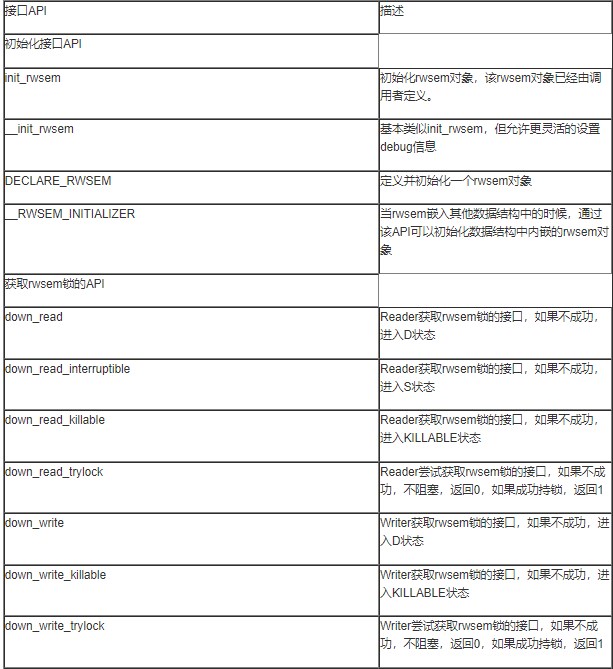
四、尝试获取读锁
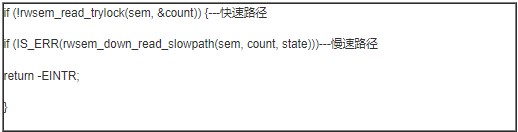
和down_read不一样,down_read_trylock只是尝试获取读锁,如果成功,那么自然是好的,直接返回1,如果失败,也不会阻塞,只是返回0就可以了。代码主逻辑在__down_read_trylock函数中,如下:
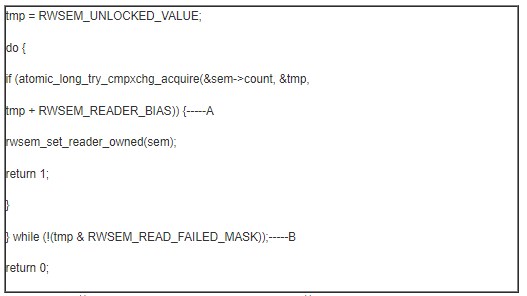
A、tmp的初始值设定为RWSEM_UNLOCKED_VALUE(0值),因此第一次循环是为当前是空锁而做的优化:如果当前的sem->count等于0,那么给sem->count赋值RWSEM_READER_BIAS,标记持锁成功,然后设定owner返回1即可。
B、如果快速获取空锁不成功,这时候tmp已经赋值(等于sem->count),不再是0值了。通过对当前sem->count的值可以判断是否是可以进入临界区。持读锁失败的情况包括:
如果判断可以进入读临界区(临界区仅有reader并且没有writer等待的场景),那么重新进入循环,如果sem->count保持不变,那么可以持锁成功,给进入临界区的reader数目加一,并设置owner task和reader持锁标记(non-spinnable比特保持不变)。如果这期间有其他线程插入修改了count值,那么需要再次判断是否能持读锁,重复上面的循环。如果判断不可以进入临界区,退出循环,持锁失败。
五、获取读锁
Reader获取读锁的代码主要在__down_read_common函数中,如下:
1、快速路径
rwsem_read_trylock是快速路径,代码如下:
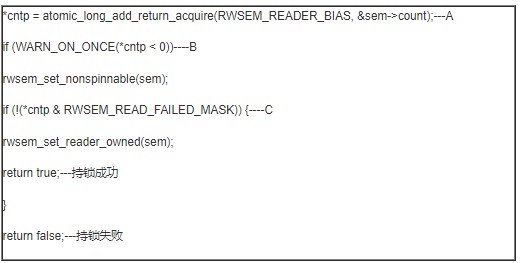
A、reader直接会给sem->count加RWSEM_READER_BIAS来增加读临界区的线程个数,当然这有可能失败,那么就进入慢速路径(需要回退错误增加读临界区线程数量)。如果恰好能够进入临界区,那么就直接设定owner返回即可。注意:这里*cntp保存了atomic add之后的新值。rwsem_down_read_slowpath会使用这个新值作为参数。
B、当reader的数量过多(以至于都溢出了)的时候,需要禁止乐观自旋。
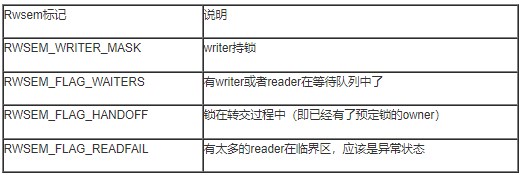
C、这里是持锁成功的路径。RWSEM_READ_FAILED_MASK上一节已经解释,这里不再赘述。这里需要注意的是rwsem_set_reader_owned函数中flag的设定,由于reader进入临界区,因此RWSEM_READER_OWNED也需要设定。RWSEM_RD_NONSPINNABLE标记保持不变。
在快速路径中,有两种常见的情况会持锁成功:一种是空锁,另外一种是没有任何waiter等待的纯reader并发。
2、慢速路径
如果快速路径持锁失败,那么进入慢速路径。慢速路径代码比较长,我们分段解析。首先是防止等待队列中waiter任务饿死的代码:

如果当前的锁被reader持有(至少有一个reader在临界区),那么不再乐观偷锁而是直接进行挂等待队列的操作。为何怎么做呢?因为需要在饿死waiter和reader吞吐量上进行平衡。一方面,连续的reader持续偷锁的话会饿死等待队列上的任务。另外,在唤醒路径上,被唤醒的top reader会顺便将队列中的若干(不大于256个)reader也同时唤醒,以便增加rwsem的吞吐量。所以这里的reader直接挂入队列,累计多个reader以便可以批量唤醒。
Reader偷锁的场景主要发生在唤醒top waiter的过程中,这时候临界区没有线程,被唤醒的reader或者writer也没有持锁(writer需要被调度到CPU上执行之后才会试图持锁,高负载的场景下,锁被偷的概率比较大,reader是唤醒后立刻持锁,被偷的几率小一点)。具体乐观偷锁(optimistic lock stealing)的代码如下:
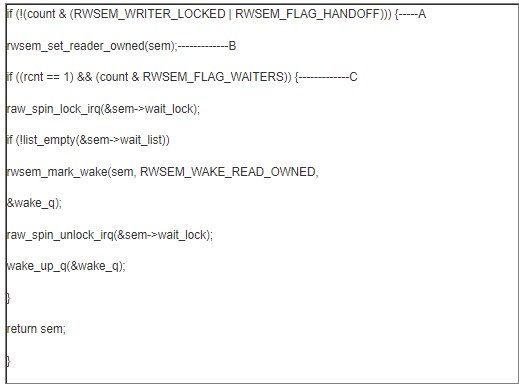
A、所谓偷锁就是不乐观自旋(要有排队),不管先来后到,直接获取锁。允许偷锁的场景是这样的:临界区没有writer持锁,也没有设置handoff,正在唤醒top waiter的过程中,并且有任务在等待队列的情况。这时候进入慢速路径的reader可以先于top waiter唤醒之前把锁偷走。需要特别说明的是:这时候reader counter已经加一,还是尽量让reader偷锁成功,否则还需要回退。
B、当前线程获得了读锁,需要设置owner,毕竟它是临界区的新客
C、如果偷锁成功并且它是临界区第一个reader,那么它还会把等待队列中的reader都唤醒(前提是top waiter不是writer),带领大家一起往前冲(这里会打破FIFO的顺序,惩罚了队列中的writer)。具体是通过rwsem_mark_wake来标记唤醒的reader,然后通过wake_up_q将reader唤醒并进入读临界区。为了减低对等待中的writer线程的影响,这时候对reader的并发是受限的,最多可以唤醒MAX_READERS_WAKEUP个reader。
如果偷锁不成功,当前的reader还是需要进入阻塞状态:
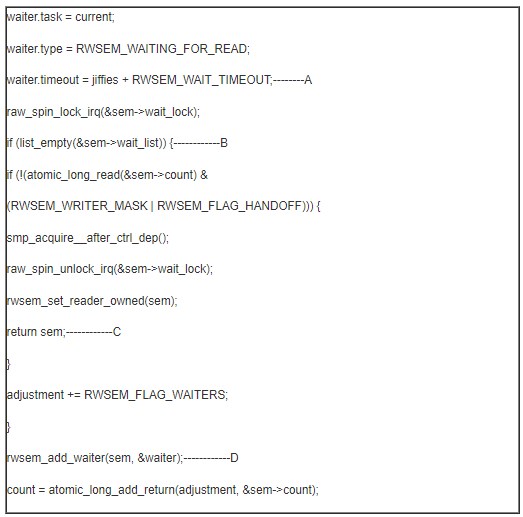
A、准备好挂入等待队列的rwsem waiter数据,需要特别说明的是这里的timeout时间:目前手机平台的HZ设置的是250,也就是说在触发handoff机制之前waiter需要至少在队列中等待一个tick(4ms)的时间。这里的timeout是指handoff timeout,为了防止偷锁或者自旋导致等待队列中的top waiter有一个长时间的持锁延迟。在timeout时间内,乐观偷锁或者自旋可以顺利进行,但是一旦超时就会设定handoff标记,乐观偷锁或者自旋被禁止,锁的所有权需要递交给等待队列中的top waiter。
B、如果目前等待队列为空,那么要做一些额外的处理。例如入队之前肯定给安排上RWSEM_FLAG_WAITERS这个标记。
C、当然,在入队之前还要垂死挣扎一下(等待队列为空的时候逻辑简单一些,不需要唤醒队列上的wait),看看是不是当前有机可乘,如果是这样,那么就顺势而为,直接持锁成功,而且counter都已经准备好了,前面已经加一了。
D、等待队列非空的时候,逻辑稍微负载一点。调用rwsem_add_waiter函数即可以把当前任务挂入等待队列尾部。这时候也需要把之前武断增加的counter给修正回来了(adjustment初始化为-RWSEM_READER_BIAS)。如果是第一个waiter,也顺便设置了RWSEM_FLAG_WAITERS标记。
在当前线程进入阻塞之前,我们需要进行试图持锁的动作(上面是空队列场景检查,这里的逻辑稍微复杂一点,由于已经入队,这里需要调用rwsem_mark_wake函数来完成阻塞后唤醒的动作),毕竟这时候可能恰好owner离开临界区,变成空锁。
A、如果这时候发现锁的owner恰好都离开了临界区,那么我们是需要执行唤醒top waiter操作的,唤醒之前需要清除禁止乐观自旋的标记,毕竟目前临界区没有任何线程。
B、除了上面说的场景需要唤醒,在reader持锁并且我们是队列中的第一个waiter的时候,也需要唤醒的动作(唤醒自己)。
阻塞部分的代码逻辑如下:
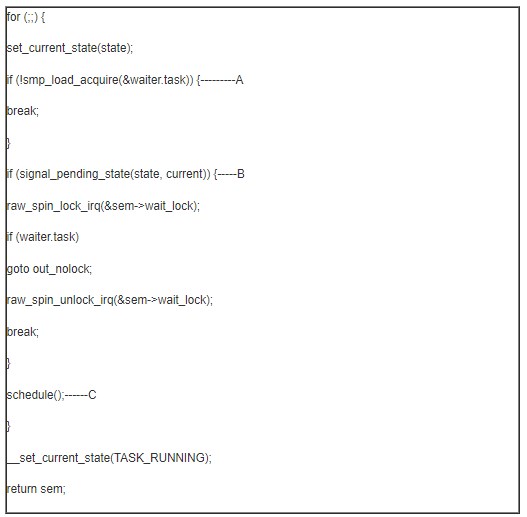
A、在rwsem_mark_wake函数中我们会唤醒reader并将其等待对象的task成员(waiter.task)设置为NULL。因此,这里如果发现waiter.task等于NULL,那么说明是该线程被正常唤醒,那么从阻塞状态返回,持锁成功。
B、如果在该线程阻塞的时候,有其他任务发送信号给该线程,那么就持锁失败退出。如果已经被唤醒,同时又收到信号,这时候需要首先完成唤醒,持锁成功,然后在其他的合适点再处理该信号。当然,大部分的rwsem都是D状态,也就不需要处理信号了。
C、进入阻塞状态,让调度器选择next task
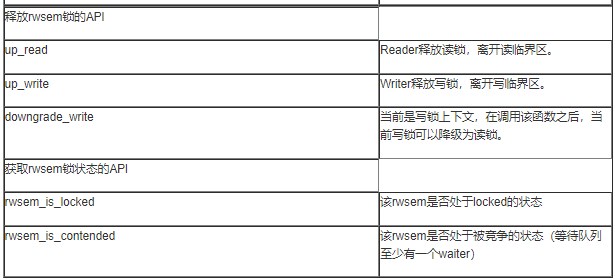
六、释放读锁
释放读锁的代码逻辑主要在__up_read函数中,如下:
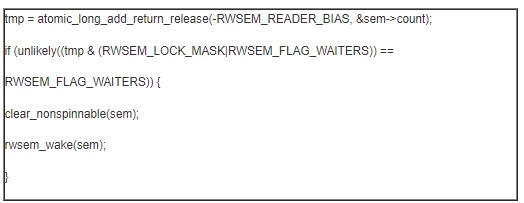
需要强调的是:这里仅仅是减去了读临界区的counter计数,并没有清除owner中的task pointer。此外,当等待队列有waiter并且没有writer或者reader在临界区的时候,我们会调用rwsem_wake来唤醒等待队列的线程。因为临界区已经没有线程,所以需要清除nonspinable标记。唤醒的动作主要是通过rwsem_mark_wake和wake_up_q来完成的,wake_up_q比较简单,我们就不赘述了,主要看看rwsem_mark_wake的逻辑。
我们首先给出wake type的解释:
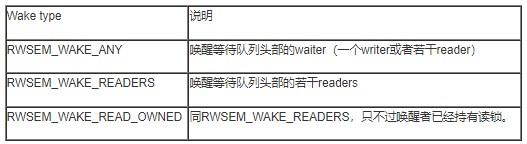
在RWSEM_WAKE_READERS场景中,多个reader被唤醒,并且当前很可能是空锁状态,为了防止writer抢锁,因此会先让top waiter持有读锁,然后慢慢处理后续。RWSEM_WAKE_READ_OWNED则没有这个顾虑,因为唤醒者已经持有读锁。
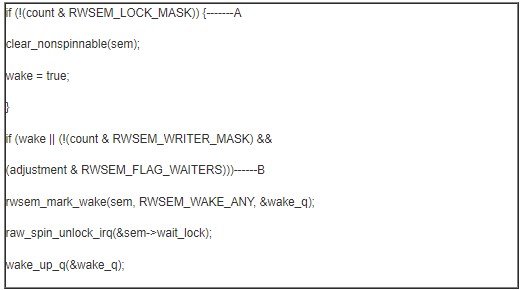
在释放读锁的场景中,rwsem_mark_wake使用的是RWSEM_WAKE_ANY参数,具体的代码如下:
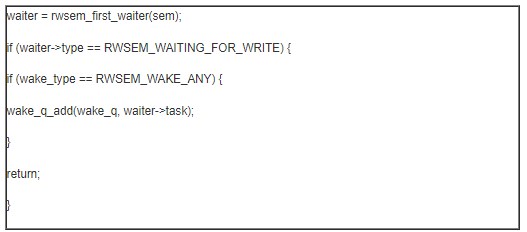
这段代码是处理top waiter是writer的逻辑。这时候,如果wake type是RWSEM_WAKE_ANY,即不关心唤醒的是reader还是writer,只要唤醒等待队列头部的waiter就好。如果top waiter是writer,我们只需要将这个writer唤醒即可,不需要修改锁的状态,出队等操作,这些都是在唤醒之后完成。如果wake type是其他两种类型(都是唤醒reader的),那么就直接返回。也就是说在rwsem_mark_wake想要唤醒reader的场景中,如果top waiter是writer,那么将不会唤醒任何reader线程。如果top waiter是reader的话,那么基本上是需要唤醒一组reader了。
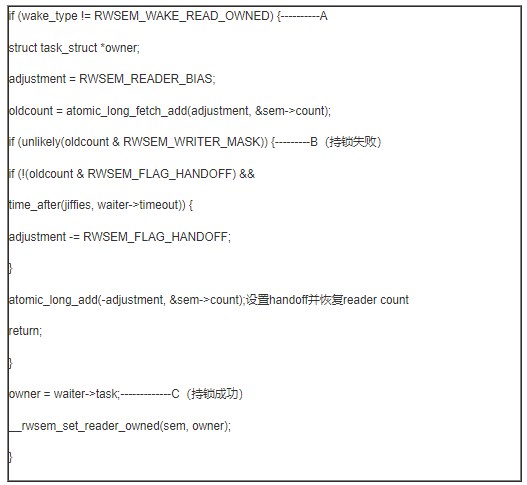
A、执行到这里,我们需要唤醒等待队列头部的若干reader线程去持锁。由于writer有可能会在这个阶段偷锁,因此,这里我们会先让top waiter(reader)持锁,然后再慢慢去计算到底需要唤醒多少个reader并将其唤醒。如果当前线程已经持有了读锁(wake type的类型是RWSEM_WAKE_READ_OWNED),则不需要提前持锁,直接越过这部分的逻辑即可。
B、如果的确发生了writer通过乐观自旋偷锁,那么我们需要检查设置handoff的条件。如果reader被writer阻塞太久,那么我们设定handoff标记,要求rwsem的writer停止通过乐观自旋偷锁,将锁的所有权转交给top waiter(reader)
C、上面已经向rwsem的count增加reader计数,这里把owner也设定上(flag也同步安排,这里non-spinnable bit保持不变)。随后top waiter的reader会唤醒若干队列中的non top reader,但是它们都不配拥有名字。
读锁已经安排的妥妥的了,下面就是慢慢唤醒等待队列的reader了。我们通过两步来完成唤醒:
1、将等待队列中的reader摘下放入到一个单独的列表中(wlist),同时对reader进行计数。后续这个计数会写入rwsem 的reader counte域。
2、对于wlist中的每一个waiter对象(reader任务),清除waiter->task并将它们放入wake_q以便稍后被唤醒。
我们先看第一轮计算唤醒reader个数的计数:
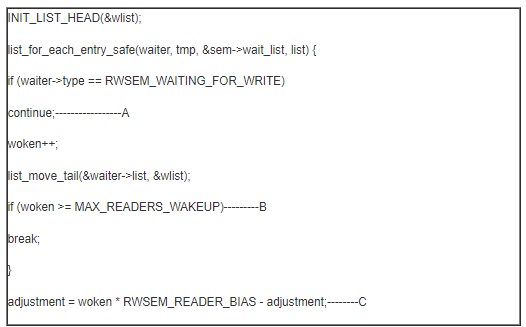
A、对于rwsem,其公平性是区分读写的。对于读,如果top waiter是reader,那么所有的reader都可以进入临界区,不管reader在队列中的顺序。对于writer,我们要确保其公平性,我们要按照writer在队列中的顺序依次持锁。根据上面的原则,我们会略过队列中的writer,将尽量多的reader唤醒并进入临界区
B、唤醒数量不能大于256,否则会饿死writer
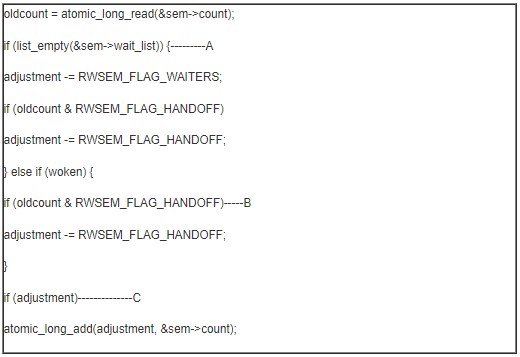
C、根据唤醒的reader数量计算count调整值
-
LINUX内核
+关注
关注
1文章
316浏览量
21653 -
ARM架构
+关注
关注
14文章
177浏览量
36317 -
FIFO电路
+关注
关注
1文章
4浏览量
4907 -
MSB
+关注
关注
0文章
13浏览量
8264
发布评论请先 登录
相关推荐
Linux下线程间通讯---读写锁和条件变量
Linux读写锁逻辑解析—尝试获取写锁
Linux内核中RCU的用法
Lock体系结构和读写锁机制解析
linux下使用IIC总线读写EEPROM的实现程序
基于ARM和Linux的超高频读写器设计
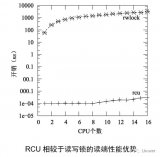
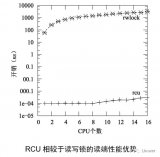
深入理解Linux RCU:RCU是读写锁的替代者
Linux系统编程--fcntl()读写锁实例
Linux 自旋锁spinlock
详谈Linux操作系统的三种状态的读写锁

Linux中的伤害/等待互斥锁介绍
Linux实例:多线程和互斥锁到底该如何使用






 工商网监
工商网监
评论