 SaberRD设计示例:汽车液压减震系统设计
SaberRD设计示例:汽车液压减震系统设计
介绍
本示例是一个简单的液压减振器系统的分层设计,利用这个设计用户可以模拟车身垂直运动的变化,如道路上的凹凸不平或坑洼,同时还可以独立仿真每个车轮变化的灵活性。这里要说的是,该系统的设计假设车辆或汽车的重量分布均匀。
设计实例使用了SaberRD的一些较新功能,如设计变量、实验编辑器和故障分析器。由于要运行故障分析,因此需要具有故障分析器FAULT的license许可。
电路说明
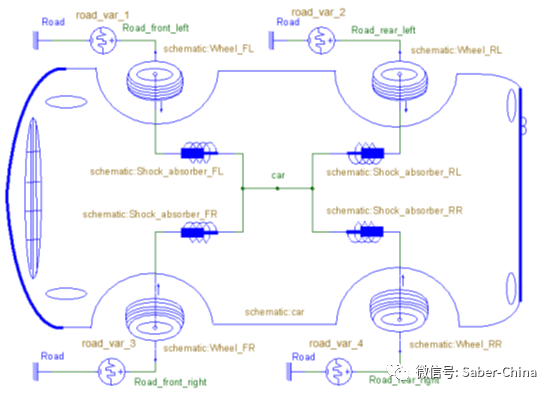
从上图中可以看出,设计包括了每个车轮(如schematic:Wheel_FL)和每个减震器单元(如schematic:Shock_Wheel_FL的单独分层示意图。分层级别提供了为每个车轮和减震器单元独立设置值的灵活性,因此可以模拟更真实的条件。
为便于说明,所有车轮和减震器单元均被视为具有相同的设置。与车轮和减震器单元的数量类似,单独的pos_pwl.sin 模型用于单独馈送道路变化。让我们假设所有四个车轮的道路变化都相同,如下所示。

此设计示例中实现的重要功能之一是用户可以自由选择车辆行驶的速度和距离。用户可以使用设计变量在设计的顶层将这些值设置为常量。本例中使用的设计变量是“speed”、“dist_travel”和“t”。
实现此功能的主要优点是可以轻松计算后轮的时间延迟。众所周知,根据车辆的速度,后轮和前轮之间会有时间延迟,要研究车辆上的垂直运动的整体变化,这个时间延迟的因素是很重要的。
为此,引入了另外两个设计变量,即 base(前轮中心和后轮中心之间的距离)和 td(时间延迟),并且在两个后轮上都添加了td来模拟延迟。变量t 和td使用下面给出的等式计算。
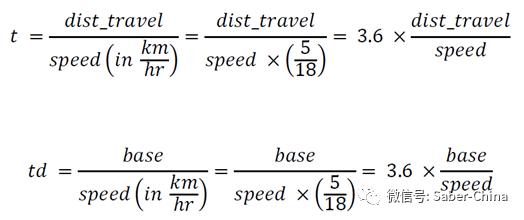
在这个示例中,车辆的速度设置为 10(以公里/小时为单位),base 设置为 1m,dist_travel 设置为 1m。
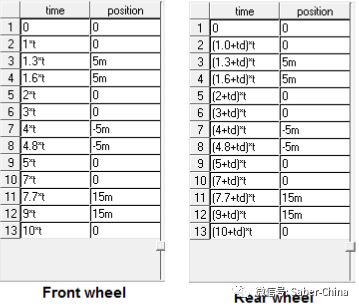
时间变量 t 和 td 分别用于计算连接到前轮和后轮的 pwl 源的 x 轴。下面给出了 pwl 源的 x(时间)和 y(位置)坐标。
安装与使用:
1.下载shock_absorber.zip并解压缩到本地光盘。
2.打开设计文件“shock_demo_1.ai_dsn”。
3.根据下面的仿真设置执行分析,并绘制列出的信号以了解设计的行为。
仿真设置:
结束时间:5
步长:1m
注意:如果比率,则趋向增加,同样如果比率 ,那么趋向必须减少以获得更好的结果。
仿真结果:
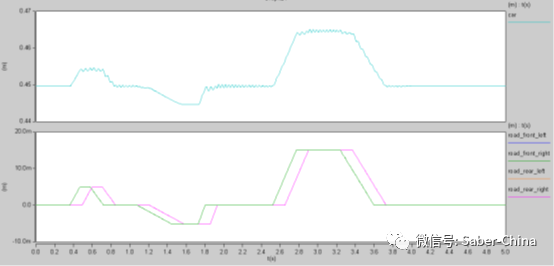
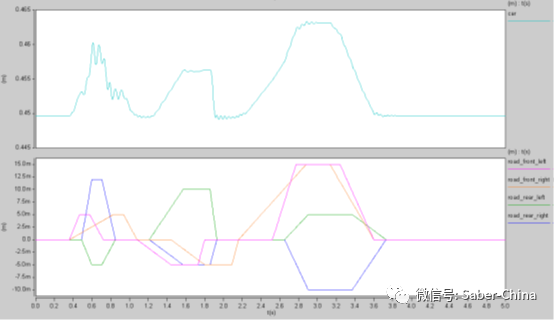
绘制四个车轮road_front_left、road_front_right、road_rear_left、road_rear_right的波形并相互附加。在绘制整车波形并检查对车辆的影响,见下所示。
1.测试速度的变化。
1.1 转到实验选项卡并打开实验“speed_alter_test”。
1.2 在实验中,首先进行瞬态分析 (tr1),速度等于10公里/小时,然后速度更改为 20公里/小时。然后使用更改的速度值进行第二次瞬态分析 (tr2)。信号按进行的瞬态分析的顺序绘制。
1.3 运行模拟并查看结果,如下所示。

2.减震器单元故障测试
为了能说明问题,对左前减震器单元进行了测试。现在考虑了三个故障,如螺旋弹簧失去刚度(故障ID:F1)、液压失去位置(故障ID:F2)和螺旋弹簧失去位置(故障ID:F3)。
2.1 转到实验选项卡并打开实验“fault_shock”。
2.2 实验中增加故障分析。如果您将鼠标悬停在故障选项卡上,您可以看到带有相应 ID 的故障。
2.3 运行仿真。
2.4 车身垂直运动的变化如下所示。

2.5信号“car_with_fault”具有三个波形。在信号上单击鼠标右键并选择“成员属性”。现在您可以分别选择每个故障。

3.假设每个车轮的道路变化不同,测试每个减震器单元。
3.1 开放式设计shock_demo_2.ai_dsn
3.2 打开实验“alter_4_test”并运行仿真
3.3 得到的结果如下
-
仿真器
+关注
关注
14文章
1018浏览量
83740 -
汽车减震器
+关注
关注
0文章
5浏览量
6005
发布评论请先 登录
相关推荐

AMT液压系统仿真及其应用
汽车新型液压离合器液压操纵系统性能测试系统详解
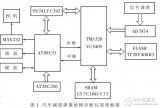
基于TMS320VC5409的汽车减震弹簧故障诊断系统
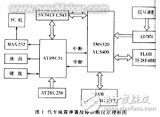
汽车减震弹簧故障诊断仪的设计方案解析
基于检测减震器的智能车辆检测系统
液压系统的组成及优缺点_液压系统的维护
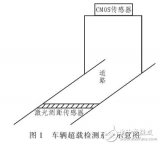
基于ABS转速检测传感器实现汽车减震检测系统的设计





 工商网监
工商网监
评论