 雷达目标检测方法总结
雷达目标检测方法总结
目标检测问题
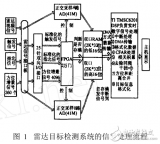
雷达返回的信号,经A/D采样后输出。
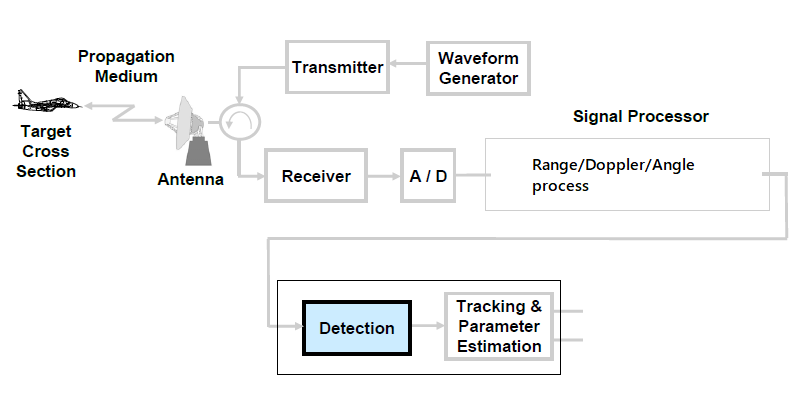
而输出的信号,除了有目标信号外,还包含了环境的噪声信号。
目标检测任务就是,如何从含有噪音的信号中提取有效的目标信息,最大化检测概率,最小化误报概率。
雷达数据的特征
目标速度快慢,离雷达的远近,在雷达波形中都有直观体现,使得雷达数据信号具有数学统计特征,这主要反映在幅度、频率、相位方面:
- 当有目标出现时,目标反射的无线电波能量较强,导致雷达接收到的信号幅度增加,雷达回波的幅度会相对较大。
- 当目标物体靠近雷达时,回波的频率会升高;反之,当目标物体远离雷达时,回波的频率会降低,因此,目标物体的运动会引起雷达回波的频率发生变化。
- 当目标靠近雷达时,回波的相位会提前;当目标远离雷达时,回波的相位会延后。
- 另外,雷达系统根据目标距离和速度调整脉冲重复频率(PRF),以保持对目标的连续跟踪。当目标距离较远时,脉冲重复频率较低;当目标距离较近时,脉冲重复频率较高。
因此,相应的就可以使用数学分析方法,例如
- 标准差:使用标准差来雷达信号的离散程度。
- 相关性:反映雷达信号各相邻脉冲之间的相关性,可用于判断目标的运动状态。
- 功率谱密度:反映雷达信号在不同频率上的能量分布,可用于分析目标的频率特征。
雷达目标检测方法
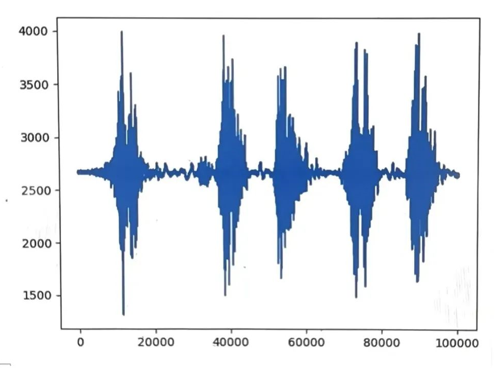
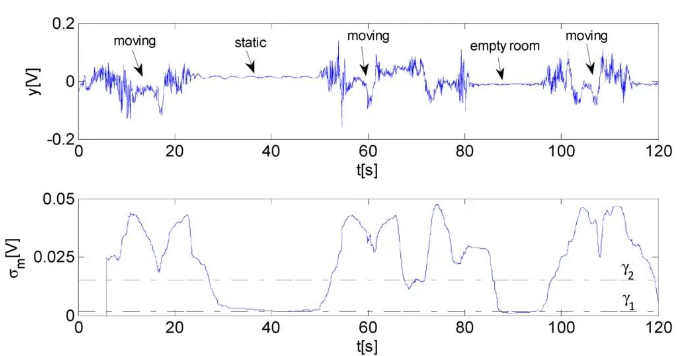
目标的存在会引起雷达信号的明显变化或等效地增加信号标准偏差,如下图所示:
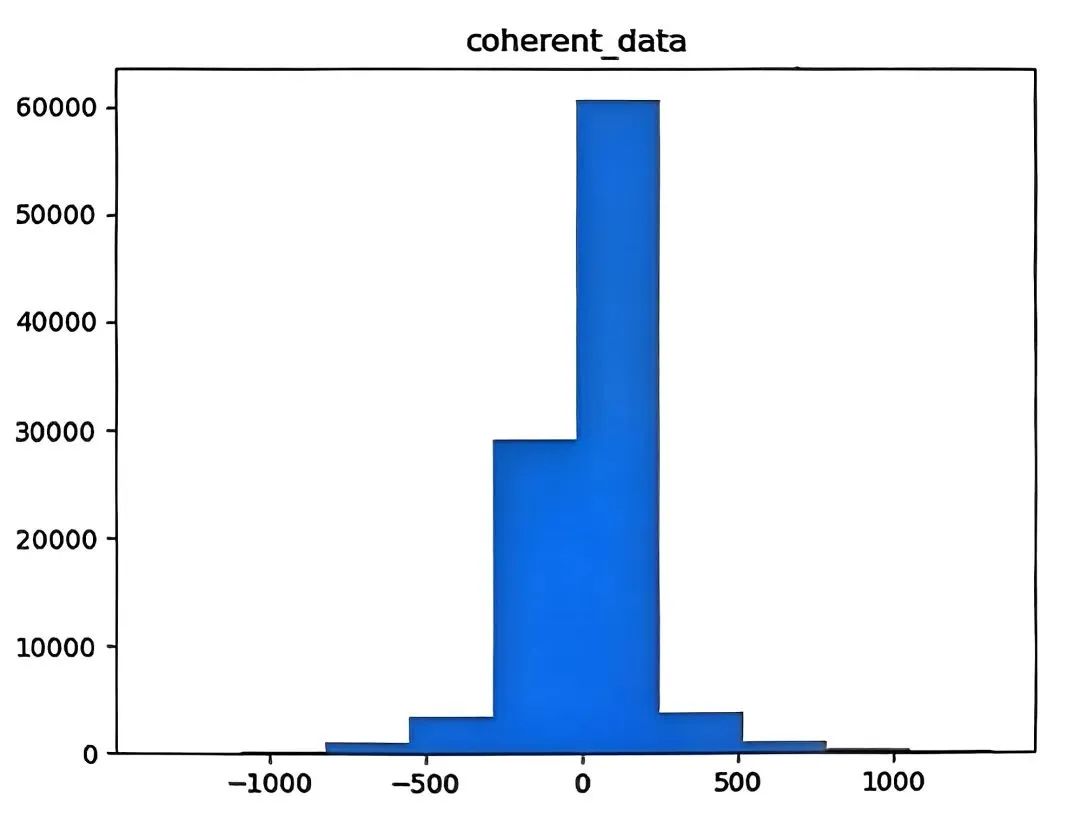
当场景中不存在目标时,雷达信号的幅度集中在原点附近,而当存在目标时,雷达信号的幅度在更宽的范围内变化,直方图就简单的反应出了雷达回波信号的分布。
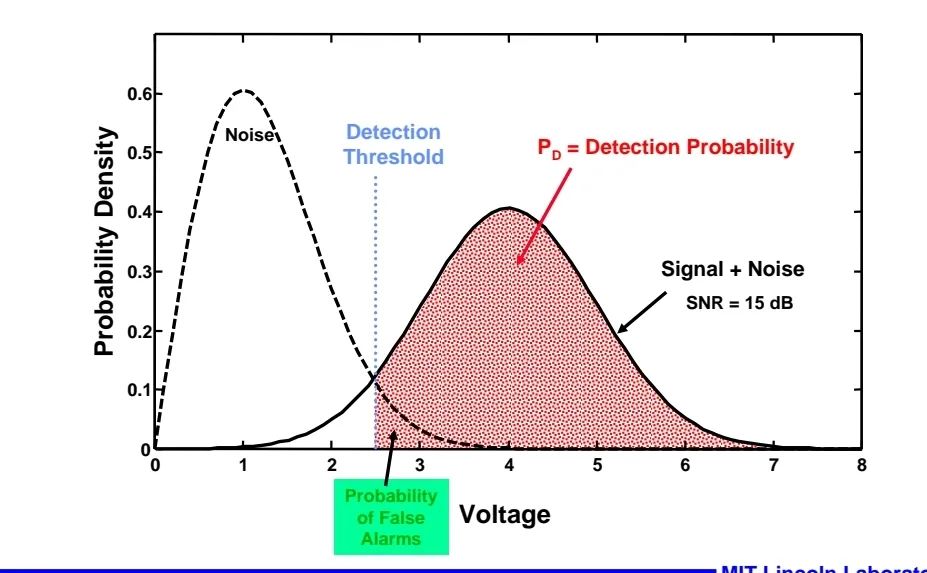
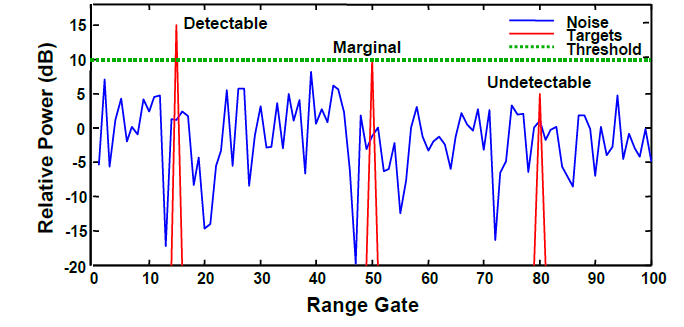
在雷达信号处理中,经常使用一个阈值去过滤噪声,但实际情况,由于噪音或者干扰信号的影响,很难选择一个合适的阈值,如下图所示,这就需要根据SNR(Signal-to-Noise) 水平,选取合适的技术或者多种技术,来减小False Alarm。
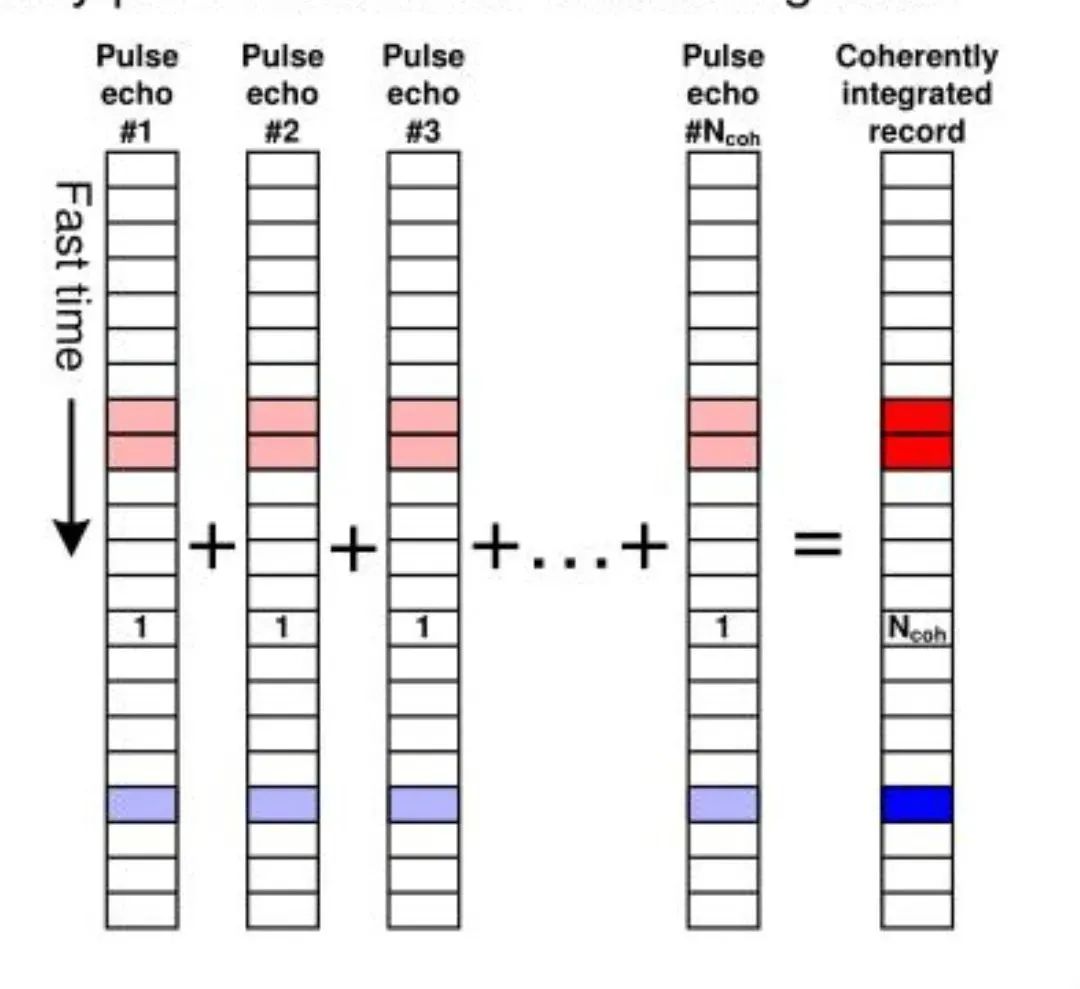
由于通常会受到噪声和干扰的影响,当我们想从噪声中提取微弱有用信号时,我们可以将多个信号集成(integration) 在一起处理,通过将信号样本相加来提高信噪比,同时对噪声和干扰进行平均,这就是相干积分(Coherent integration)和非相关积分(non-coherent integration)
积分的结果是目标信号增强了,而噪音信号减弱了。
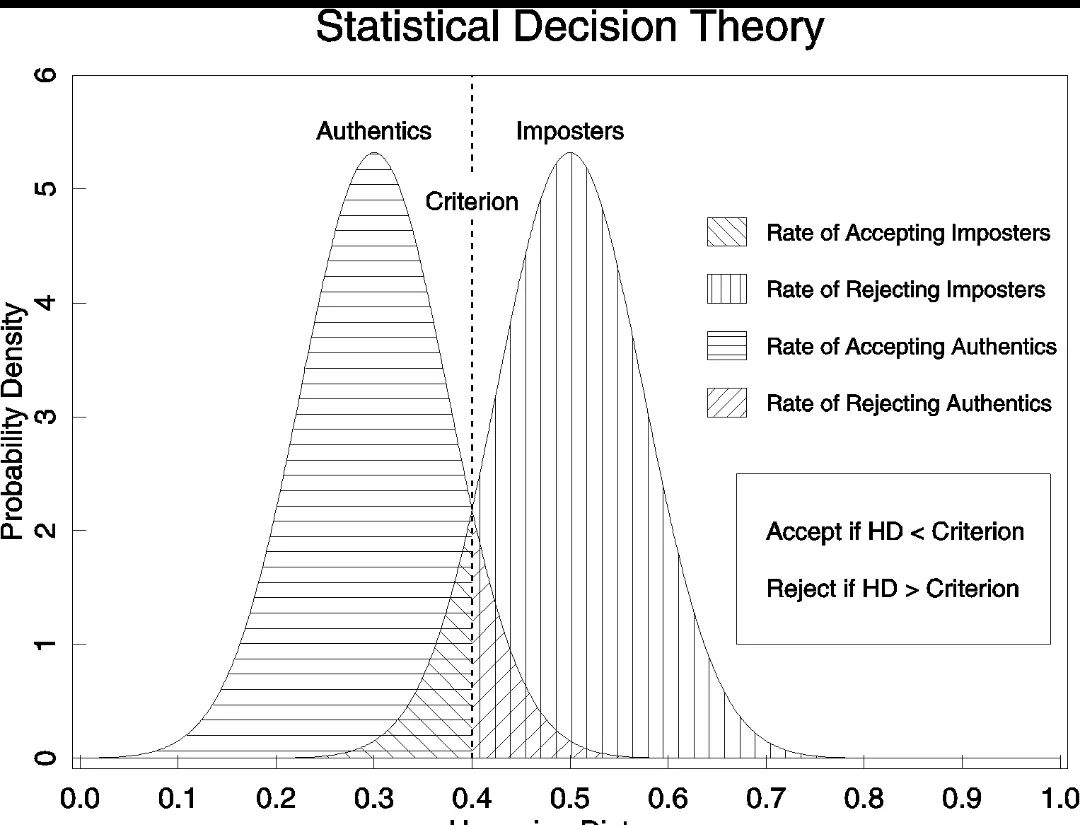
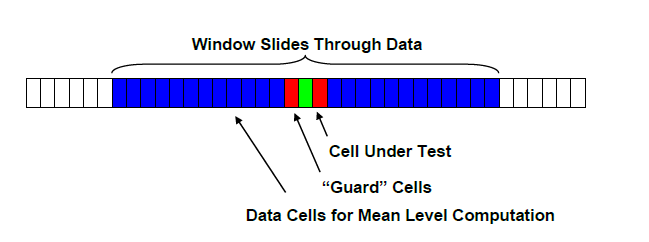
但是,在选取阈值时,我们假设基于理论概率,并且仅限于具有已知方差(功率) 的高斯白噪声。在实际应用中,噪声通常是有色的,其功率是未知的。假设雷达信号由噪声和杂波组成,这使得检测真实目标变得困难。使用纯噪声样本估计本底噪声,这就是自适应阈值方法。这就是CFAR技术,CFAR(Constant False-Alarm Rate 恒定误报率) 方法是雷达目标检测中使用的一种信号处理技术,用于在存在噪声和杂波的情况下检测目标。CFAR 方法被称为“恒定误报率”,因为它旨在保持恒定的误报概率,而不管雷达信号中的噪声和杂波水平如何。
例如CA-CFAR的估计函数:
在存在噪声和杂波的情况下,CFAR能减小误报水平。但是,在复杂背景下,例如强杂波环境或目标与背景特性相似的情况下,CFAR算法可能出现虚警,对动态环境(如目标速度、尺寸变化等)适应性较差,因此,实际使用中,仍然可能需要结合其他方法。
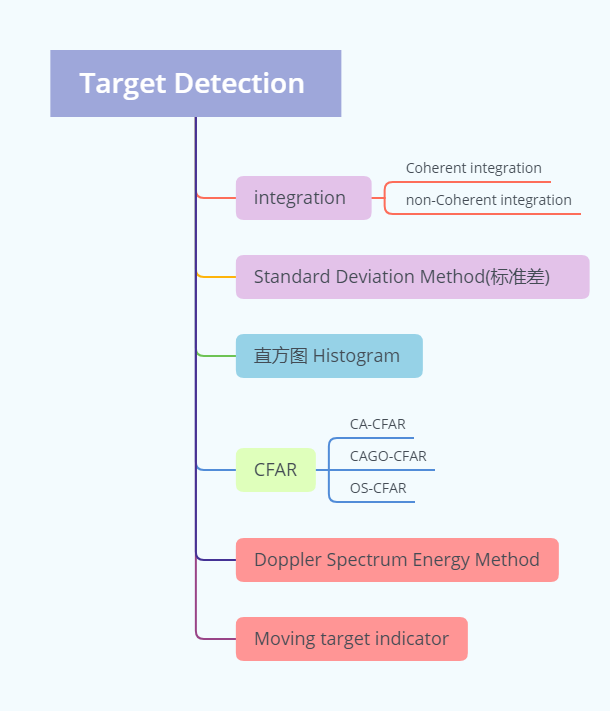
上图简单的罗列了几项常见的目标检测方法,本文先作为一个阶段性总结,后续再接再厉,努力继续完善。
-
信号
+关注
关注
11文章
2812浏览量
77226 -
雷达
+关注
关注
50文章
2976浏览量
118189 -
无线电波
+关注
关注
2文章
257浏览量
25767 -
目标检测
+关注
关注
0文章
213浏览量
15689
发布评论请先 登录
相关推荐
雷达目标检测算法研究及优化
毕设求助(可以有偿)——基于FPGA的LFMCW雷达多目标检测方法
基于CPCI接口DSP板的雷达目标模拟器
求大佬分享一种基于毫米波雷达和机器视觉的前方车辆检测方法

解析在目标检测中怎么解决小目标的问题?






 工商网监
工商网监
评论