 二值图像分析的典型案例
二值图像分析的典型案例

最近一直有人向我提问很多二值图像分析相关的问题,特别选择了两个典型的轮廓分析问题。进行分析与编码实现与演示,废话不多说,先看第一个问题。
问题一
描述如下:
想找到工具盘中间缺少的几个点,统计出可以看到的工件数目
仔细分析图像发现,中间都毫无另外的有个白色很亮的圆圈,这个给了我两个思路
可以通过霍夫变换检测圆来提取到
可以通过二值图像分析来提取 + 轮廓分析来提取到这些点
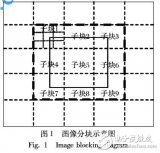
得到这些轮廓点之后通过分析整个轮廓区域得到倾斜角度,进行纠偏,然后通过X与Y投影进行分割,得到每个零件的中心位置坐标,根据每一行的间隔设置阈值,从而实现缺少部分部分的标出与件数统计,确定了这样的思路以后,我就开始了写代码。代码实现是基于轮廓分析的思路,因为这个方法,用的阈值比较少,有利于算法稳定性检测。演示各部输出。二值化处理之后(形态学处理):
轮廓发现与校正角度之后
投影分析与统计结果如下:
此外基于霍夫也是可以尝试的,霍夫的二值化效果也比较好,显示如下:
感兴趣的同学可以自己继续尝试下去。
问题二
描述如下:
如何统计下图中的对象个数,原图如下
看到这个图像之后,个人觉得解决十分简单,基于最外层轮廓发现即可,无需树形结构与层次分析,集合图像形态学分析或者距离变换就可以得到,最终代码的运行结果如下:
代码
问题1的代码如下(已经添加各步骤注释了):
src=cv.imread("D:/images/zsxq/zsxq_01.jpg") cv.imshow("input",src) #二值化处理 gray=cv.cvtColor(src,cv.COLOR_BGR2GRAY) se=cv.getStructuringElement(cv.MORPH_RECT,(3,3)) dst=cv.morphologyEx(gray,cv.MORPH_GRADIENT,se) ret,binary=cv.threshold(dst,0,255,cv.THRESH_OTSU|cv.THRESH_BINARY) #形态学处理 se=cv.getStructuringElement(cv.MORPH_ELLIPSE,(5,5)) binary=cv.morphologyEx(binary,cv.MORPH_OPEN,se) se=cv.getStructuringElement(cv.MORPH_ELLIPSE,(10,10)) binary=cv.morphologyEx(binary,cv.MORPH_CLOSE,se) cv.imshow("binary",binary) #轮廓分析 contours,hireachy=cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE) result=np.zeros_like(binary) total=0 forcntinrange(len(contours)): area=cv.contourArea(contours[cnt]) ifarea< 55: continue rrt = cv.minAreaRect(contours[cnt]) cx, cy = rrt[0] cv.circle(result, (np.int32(cx), np.int32(cy)), 5, (255), -1) total += 1 # 几何纠偏 h, w = result.shape pts = [] for row in range(h): for col in range(w): pv = result[row, col] if pv == 255: pts.append((col, row)) pts = np.array(pts) rrt = cv.minAreaRect(pts) print(rrt) M = cv.getRotationMatrix2D(((w-1)/2.0,(h-1)/2.0),rrt[2],1) dst = cv.warpAffine(result,M,(w,h)) src = cv.warpAffine(src,M,(w,h)) # Y方向投影 tbins = y_split(dst) # X 方向投影 print("y-step", tbins) for i in range(0, len(tbins), 1): if i == 0: roi = dst[0:tbins[i], 0:w] src_roi = src[0:tbins[i], 0:w, :] x_projection(roi, src_roi) cv.imshow("roi", roi) cv.waitKey(0) if i == len(tbins)-1: roi = dst[tbins[i]:h-1, 0:w] src_roi = src[tbins[i]:h-1, 0:w, :] x_projection(roi, src_roi) cv.imshow("roi", roi) cv.waitKey(0) if 0 < i < (len(tbins)-1): roi = dst[tbins[i-1]:tbins[i] - 1, 0:w] src_roi = src[tbins[i-1]:tbins[i] - 1, 0:w,:] x_projection(roi, src_roi) cv.imshow("roi", roi) cv.waitKey(0) # 显示结果 cv.imshow("result", result) cv.imshow("dst", dst) cv.putText(src, "numbers: " + str(total), (50, 50), cv.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 255), 2) cv.imshow("detection", src) cv.waitKey(0) cv.destroyAllWindows()
问题2的完整代码如下:
importcv2ascv
importnumpyasnp
src=cv.imread("D:/images/zsxq/zsxq_02.jpg")
cv.imshow("input",src)
src=cv.GaussianBlur(src,(3,3),0)
gray=cv.cvtColor(src,cv.COLOR_BGR2GRAY)
edge=cv.Canny(src,50,100)
se=cv.getStructuringElement(cv.MORPH_ELLIPSE,(10,10))
binary=cv.morphologyEx(edge,cv.MORPH_CLOSE,se)
contours,hireachy=cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
count=0
forcntinrange(len(contours)):
area=cv.contourArea(contours[cnt])
ifarea< 100:
continue
count += 1
rrt = cv.minAreaRect(contours[cnt])
# rotated rectangle
box = cv.boxPoints(rrt)
box = np.intp(box)
cv.drawContours(src, [box], 0, (255, 0, 0), 2)
cv.imshow("binary", binary)
cv.imshow("result", src)
cv.waitKey(0)
cv.destroyAllWindows()
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
算法
+关注
关注
23文章
4811浏览量
98632 -
代码
+关注
关注
30文章
4978浏览量
74445 -
二值图像
+关注
关注
0文章
14浏览量
8925
原文标题:二值图像分析案例精选
文章出处:【微信号:CVSCHOOL,微信公众号:OpenCV学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于FPGA的二值图像的膨胀算法的实现
1 背景知识二值图像(Binary Image)是指将图像上的每一个像素只有两种可能的取值或灰度等级状态,人们经常用黑白、B&W、单色图像表
发表于 08-14 09:08
岩石节理二值图像的细化
分析岩石节理图片,细化是关键的一步,它是分析节理拓扑结构的基础。由于二值节理图片噪声大,节理内部有空洞等特点,直接用现有细化算法得到的结果中存在大量毛刺和并
发表于 07-08 08:35
•7次下载
基于Legendre矩的多阈值二值图像重构算法
基于Legendre矩的多阈值二值图像重构算法:首先介绍Legendre正交矩及其逆变换;然后根据Legendre矩逆变换的特点,采用一种新的方法—— 多阁值法对重构的
发表于 10-26 11:34
•15次下载

机器视觉的图像二值化详细分析
传统的机器视觉通常包括两个步骤——预处理和物体检测。而沟通二者的桥梁则是图像分割(Image Segmentation)[1]。图像分割通过简化或改变图像的表示形式,使得



评论