 视觉系统镜头介绍及选型方法
视觉系统镜头介绍及选型方法
1.镜头介绍
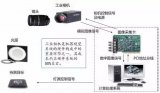
镜头作为机器的眼睛,其主要作用是将目标物体的图像聚焦在图像传感器(相机)的光敏器件上。数据系统所处理的所有图像信息均需要通过镜头得到,镜头的质量直接影响到视觉系统的整体性能。
(1)工作距离(Working Distance)
工作距离指的是镜头的最下端到景物之间的距离。一般的镜头是可以看到无限远的,也就是说是没有上限的。
我们需要注意的是“最小工作距离”在镜头上有两个有刻度的调节圈,一个是调节光圈的,另一个是调焦的,在调焦的刻度圈上标有此镜头的工作距离从最近到最远是多少。
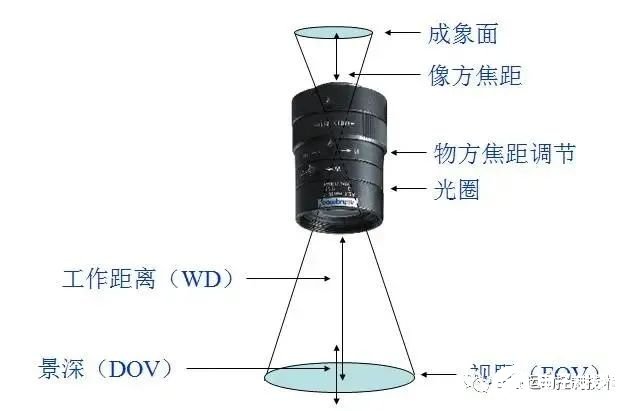
(2)视场(Field of view, 即FOV,也叫视野范围)
视野指的是镜头能看到的最大范围,也就是镜头所能覆盖的有效工作区域。
(3)景深(Depth of view,即DOF)
景深与视野相似,不同的是景深指的是纵深的范围,视野指的是横向的范围。在最小工作距离到最大工作距离之间的范围称为景深,景深内的物体都可以清晰成像。景深一般可以通过光圈调节,光圈越小,景深越大。
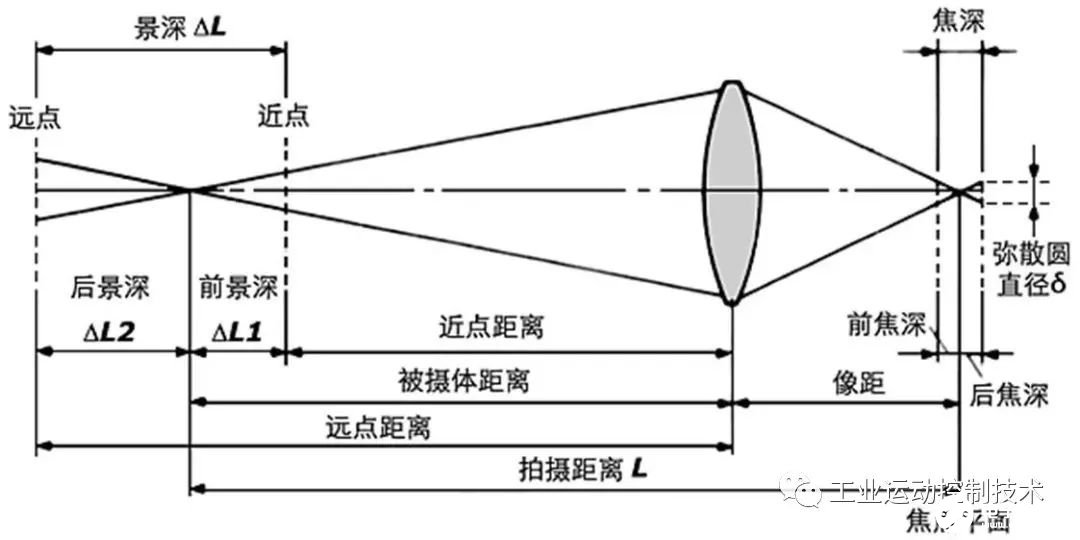
可成清晰像的最远的物平面称为远景平面,它与对准平面的距离成为后景深△L1;能成清晰像的最近物平面称为近景平面,它与对准平面的距离称为前景深△L2;景深=前景深+后景深,景深计算公式为:
前景深ΔL1=FδL^2/(f^2+FδL)(1)
后景深ΔL2=FδL^2/(f^2-FδL)(2)
景深ΔL=ΔL1+ΔL2=(2f^2FδL^2)/(f^4-F^2δ^2L^2)
(由于第一次写博客,还不太会编辑公式,L^2就是L的平方的意思)
δ——容许弥散圆直径,f——镜头焦距,F——镜头的拍摄光圈值,L——对焦距离
ΔL1——前景深,ΔL2——后景深,ΔL——景深
从公式(1)和(2)可以看出,后景深 > 前景深。
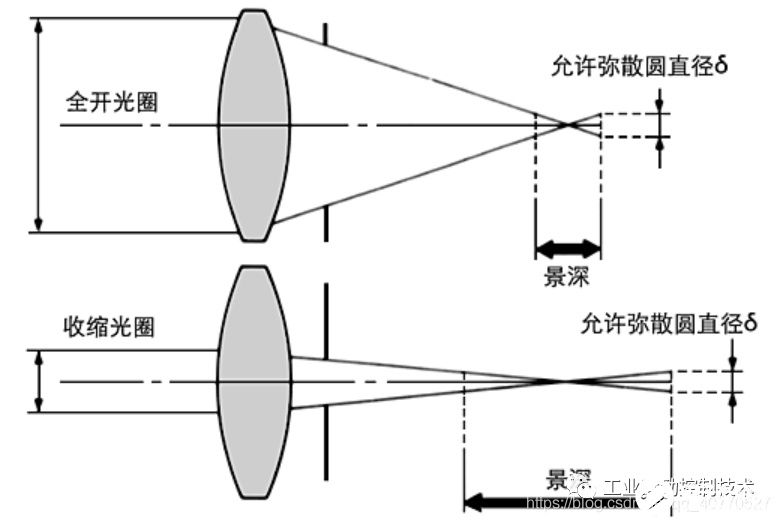
由景深计算公式可以看出,景深与镜头使用光圈、镜头焦距、拍摄距离以及对像质的要求(表现为对容许弥散圆的大小)有关。这些主要因素对景深的影响如下(假定其他的条件都不改变)
(1)、镜头光圈:
光圈越大,景深越小;光圈越小,景深越大;
(2)、镜头焦距
镜头焦距越长,景深越小;焦距越短,景深越大;
(3)、拍摄距离
距离越远,景深越大;距离越近,景深越小。
总结:对于对景深有要求的项目,尽可能使用小的光圈;在选择放大倍率的镜头时,在项目许可下尽可能选用低倍率镜头。如果项目要求比较苛刻时,倾向选择高景深的尖端镜头。
网上有些在线的景深计算器,有兴趣的网友可以自行搜索查询计算,以下是两个景深的计算实例:
(1)、200/2.8对焦在5m时,f/2.8的景深:
δ=0.035mm,f=200mm, F=2.8,L=5000mm
计算得:ΔL1=60mm,ΔL2=62mm,ΔL=122mm
结论:该镜头在用f/2.8拍摄时,清晰范围是从4.94m~5.062m,景深很浅。
(2)、200/2.8+2X=400/5.6对焦在5m时,f/5.6的景深:
δ=0.035mm,f=400mm,F=5.6,L=5000mm
ΔL1=30mm,ΔL2=31mm,ΔL=61mm
结论:该镜头在配合2X增距镜后,主镜头用f/2.8拍摄时,景深是(1)的一半。
(4)焦距(focal length)
要了解焦距首先要知道成像面,那成像面又是什么呢?成像面是入射光通过镜头后所成像的平面,这个面是一个圆形。
焦距就是镜头到成像面的距离,一般你问厂家镜头的时候,厂家一般都会问你需要焦距是多少的镜头,比如:50mm镜头,8mm镜头还是75mm镜头等。这些就是镜头到成像面的距离,也就是焦距。单位是毫米。但是在实际使用中,往往需要相机标定,标定的主要参数就是相机焦距。对于工业镜头而言,一般都是使用定焦镜头,也就是焦距f通常都是固定的。工业镜头,一般有光圈、对焦圈两个转环,我们使用对焦圈来改变透镜的位置时,其改变的距离有一定的限制。但这并不意味这我们使用的是变焦镜头。
(5)视角(visual angle)
视角顾名思义就是视线的角度,也就是镜头能看多“宽”。焦距越小,视角越大;最小工作距离越短,视野越大。
对于普通的镜头来说,选择原则是:工作距离越近越好,镜头的畸变越小越好,视野越大越好。
(6)分辨率(resolution ratio)
图像系统可以测到的受检验物体上的最小可分辨特征尺寸。在多数情况下,视野越小,分辨率越好。
(7)光圈:(Iris)
光圈是一个用来控制光线透过镜头进入机身内感光面光量的装置,在拍摄高速运动物体时候,由于曝光时间短,需要使用大光圈。
光圈大小一般用F表示,以镜头焦距f和通光孔径直径D的比值来衡量,当光圈物理孔径不变时,镜头中心与感光器件距离越远,F值越大,光圈越小;反之,F值越小,光圈越大。
一般通过调整通光孔径大小来调节光圈,完整的光圈数值系列如下:F1,F1.4,F2,F2.8,F4,F5.6,F8,F11,F16,F22,F32,F44,F64。
(8)镜头畸变
镜头在成像时,特别是用短焦距镜头拍摄大视场,图像会产生形变,这种情况叫做镜头的畸变,这是由于镜头的光学结构和成像特性导致的,原因是由于视野中局部放大倍数不一致造成的图像扭曲。
拍摄的视场越大,所用的镜头的焦距越短,畸变的程度就越明显,一般有桶型畸变和枕型畸变两种,可以通过图像标定减弱这种平面畸变的影响。
(9)接口及最大兼容CCD尺寸
镜头接口只要可跟相机接口匹配安装或可通过外加转换口匹配安装就可以了,其一般的接口是C口跟CS口,这两者主要的区别是图像传感器与镜头之间的距离不同这两者类型的接口没有细分的,其C口的大小全都都一样,;
所有镜头都只能在一定的范围内清晰成像,最大兼容CCD尺寸是指镜头能支持的最大清晰成像的范围。在实践选择相机和镜头时,要注意所选择的镜头的最大兼容CCD尺寸要大于或等于相机芯片的尺寸。
2.镜头选型方法(含相机)
已知:被检测物体大小为A×B,要求精度小于C,工作距离为D
(1). 计算短边对应的像素数E=B/C,相机长边和短边的像素数都要大于E;
即相机最小分辨率为:E×E
这里并不能完全确定相机的传感器尺寸,虽传感器尺寸与视野等有一定关系,但没有直接公式关系,因为镜头的选择会依赖相机(分辨率、接口),后面可以根据镜头的选型反推这里相机是否正确。
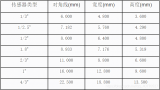
这里可以暂定相机C接口,2/3英寸,得到相机传感器短边尺寸G
(2)可求得:
像元尺寸=传感器尺寸/分辨率(像元个数)=G/E
放大倍率=所选相机传感器短边尺寸/相机短边的视野范围=G/B
由于相机确定,那么我们可以先确定需要的工业镜头是C接口,最少支持2/3",
(3)焦距=(工作距离D×相机传感器短边尺寸G)/物体宽度B 单位:mm(焦距越小,视场角就越大,视野也就相应的更大,因为焦距一般有固定的值,如5mm,8mm,所以实际焦距可以相应选小一号的)
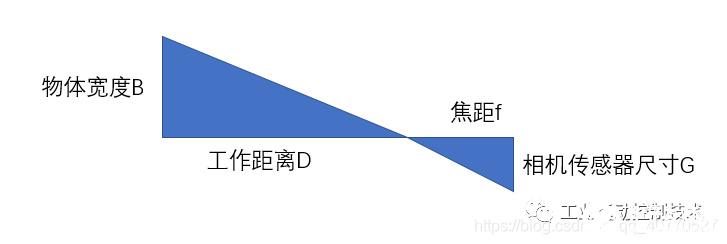
其实,由上图关系得放大倍率还有另一种计算方法:
放大倍率=所选相机传感器短边尺寸/相机短边的视野范围=焦距/工作距离
那么,焦距=工作距离×放大倍数
考虑实际工作情况,更多采用的焦距计算公式为:焦距=工作距离×(1/放大倍数+1)=(工作距离*相机传感器短边尺寸)/(物体宽度+相机传感器短边尺寸)
验证方法
因为视野范围与精度是两个矛盾的指标,以上计算以精度为标注进行选型(用的物体短边B),可计算最终视野是否满足长边A:
长边A < 工作距离D × 相机传感器短边G / 焦距f
以上仅针对主要参数进行计算选择,其他如畸变、景深、环境等,可根据实际要求进行选择。
CRT专业提供工业自动化运动控制技术及解决方案!
---(激光)焊接、抛光、切割、直坐标机器人(桁架机械手)、等特种数控设备运动控制系统,(步进电机、伺服电机、驱动器、电源)。
审核编辑 黄宇
-
镜头
+关注
关注
2文章
498浏览量
25586 -
视觉系统
+关注
关注
3文章
329浏览量
30659
发布评论请先 登录
相关推荐

机器视觉系统用途与实现及市场趋势
CCD机器视觉系统的工作原理和特性
机器视觉系统与运动控制系统的区别
机器视觉系统的工作原理和应用领域
机器视觉系统五个模块介绍

机器视觉系统的组成部分

视觉系统所使用的相机种类介绍

机器视觉系统中常用摄像机的分类

工业相机搭配的镜头品牌

工业相机与镜头介绍及选型方法


工业机器视觉系统中光源设计应用






 工商网监
工商网监
评论