 EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断
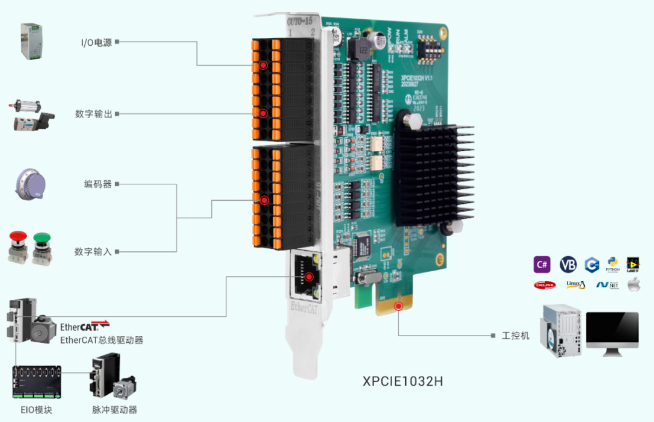
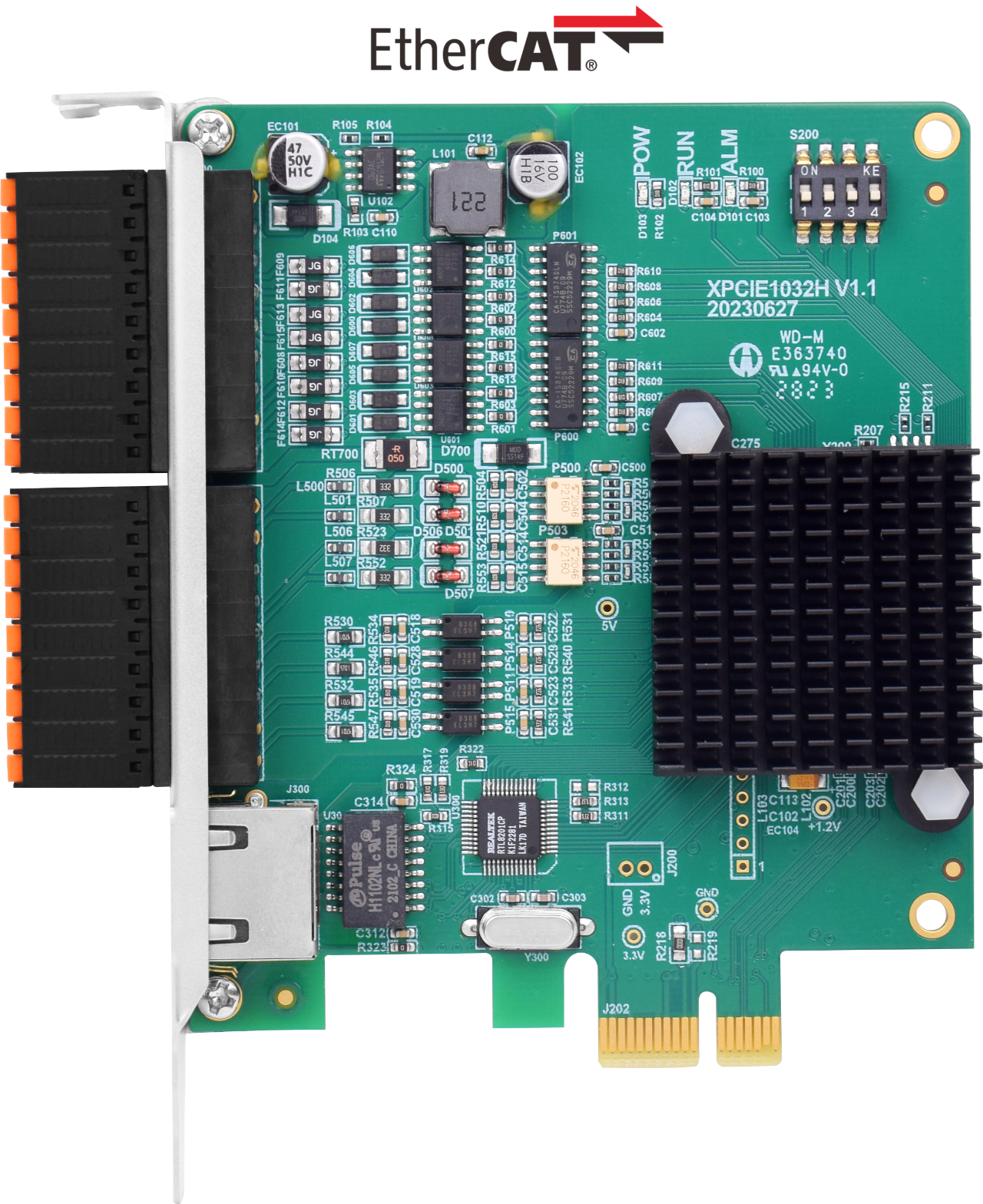
XPCIE1032H功能简介
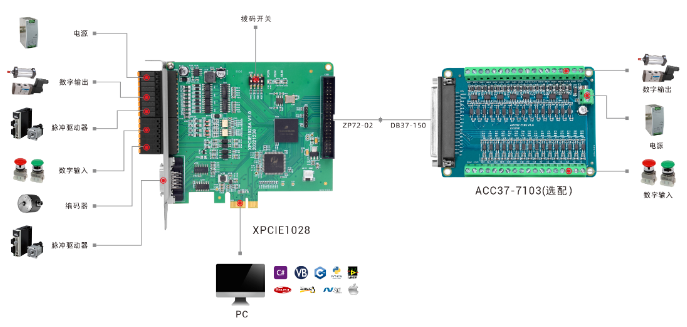
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动控制实时软核,解决了高速高精应用中,PC Windows开发的非实时痛点,指令交互速度比传统的PCI/PCIe快10倍。

XPCIE1032H支持PWM,PSO功能,板载16进16出通用IO口,其中输出口全部为高速输出口,可配置为4路PWM输出口或者16路高速PSO硬件比较输出口。输入口含有8路高速输入口,可配置为4路高速色标锁存或两路编码器输入。
XPCIE1032H搭配MotionRT7实时内核,使用本地LOCAL接口连接,通过高速的核内交互,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间可以达到3-5us左右。
RTSys开发软件简介
RTSys是正运动推出的集成运动控制+机器视觉功能的开发软件,支持RTBasic、RTPlc梯形图、RTHmi、RTVision机器视觉等二次开发,并可混合编程、实时仿真、在线跟踪以及诊断与调试,快速实现智能装备的视觉定位、测量、识别、检测和复杂的运动控制等系统的开发。
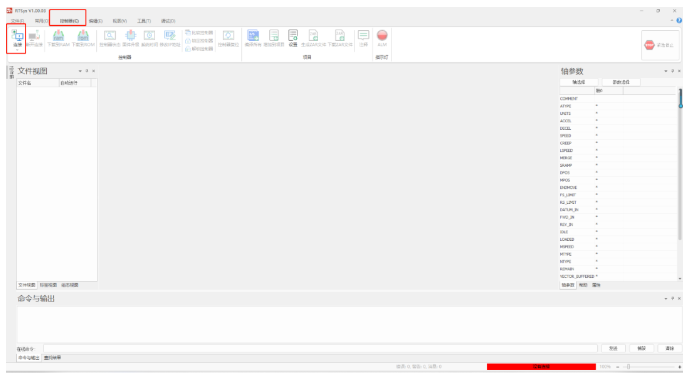
RTSys软件开发界面如下图所示。用户可通过串口或网口连接PC与控制器,使用RTSys软件编写的程序可以直接下载到正运动控制器里脱机运行,也可以在PC平台仿真运行。
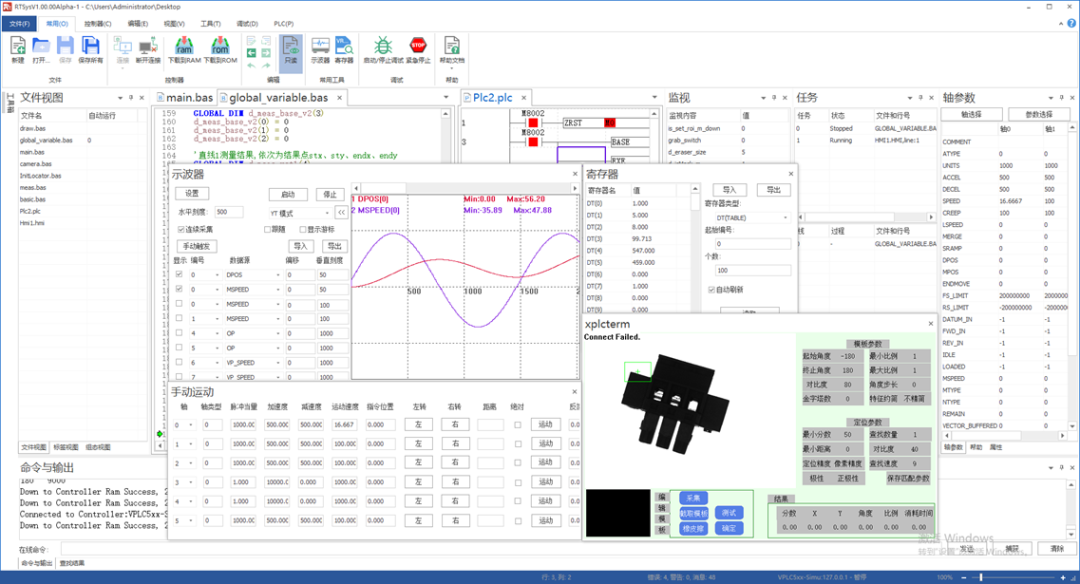 RTSys开发界面
RTSys开发界面
RTSys软件支持四种编程方式:RtBasic、RtPLC梯形图、HMI组态以及C语言编程。
RTSys软件支持在线仿真调试,自带仿真器ZMC Simulator和组态程序仿真工具xplc screen。
➜XPCIE1032H与MotionRT7实时内核的配合具有以下优势:
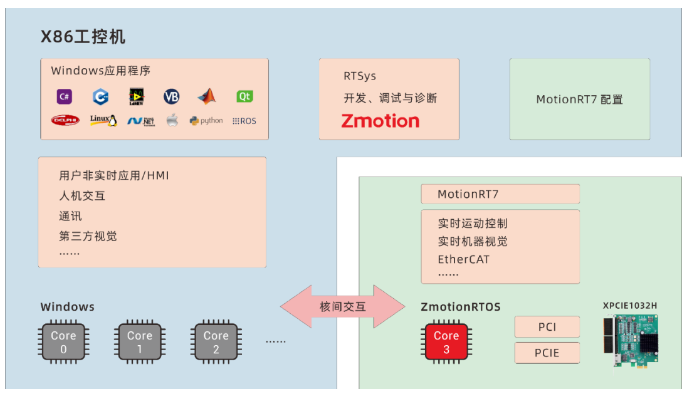
1.支持多种上位机语言开发,所有系列产品均可调用同一套API函数库;
2.借助核内交互,可以快速调用运动指令,响应时间快至微秒级,比传统PCI/PCIe快10倍;
3.解决传统PCI/PCIe运动控制卡在Windows环境下控制系统的非实时性问题;
4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量控制等应用;
5.提供高速输入接口,便于实现位置锁存;
6.支持EtherCAT总线和脉冲输出混合联动、混合插补。

➜使用XPCIE1032H和MotionRT7进行项目开发时,通常需要进行以下步骤:
1.安装驱动程序,识别XPCIE1032H;
2.打开并执行文件“MotionRT710.exe”,配置参数和运行运动控制实时内核;
3.使用ZDevelop软件连接到控制器,进行参数监控。连接时请使用PCI/LOCAL方式,并确保ZDevelop软件版本在3.10以上;
4.完成控制程序开发,通过LOCAL链接方式连接到运动控制卡,实现实时运动控制。

➜与传统PCI/PCIe卡和PLC的测试数据结果对比:
| 平均值 | C++ LOCAL | C# LOCAL | 传统PCI/PCIe卡接口交互 | PLC网口通讯交互 |
| 1w次单条读取交互周期 | 4.70us | 5.3us | 64us | 500us-10ms |
| 10w次单条读取交互周期 | 3.90us | 5.7us | 65us | 500us-10ms |
| 1w次多条读取交互周期 | 6.20us | 8.85us | 472us | 500us-10ms |
| 10w次多条读取交互周期 | 5.50us | 8.37us | 471us | 500us-10ms |
我们可以从测试对比结果看出,XPCIE1032H运动控制卡配合实时运动控制内核MotionRT7,在LOCAL链接(核内交互)的方式下,指令交互的效率是非常稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,非常适用于高速高精的应用。
XPCIE1032H控制卡安装
关闭计算机电源。
打开计算机机箱,选择一条空闲的XPCIE卡槽,用螺丝刀卸下相应的挡板条。
将运动控制卡插入该槽,拧紧挡板条上的固定螺丝。
XPCIE1032H驱动安装与建立连接参考往期文章EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接。
一、C#语言进行运动控制开发
具体C#新建项目以及程序开发流程具体可参考“运动控制卡应用开发教程之C#”。本文主要以官方提供的C#例程为大家进行讲解。
1、进入光盘资料选择“PC函数库2.1.1”。
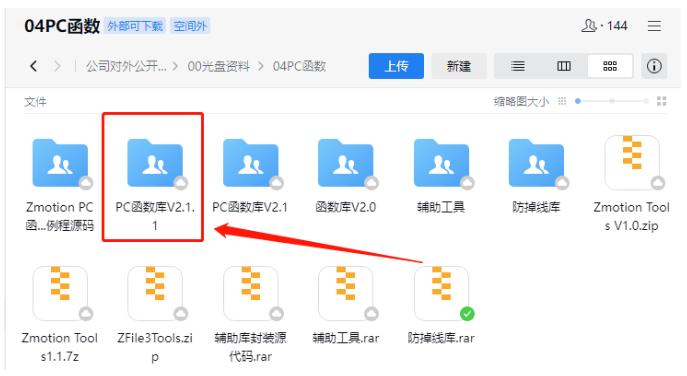
2、点击“Windows平台”。

3、点击“库文件与例程”。
4、根据需要选择对应的函数库和例程(64位为例),这里选择64位。
5、解压后选择“C#”例程。
6、打开单轴运动项目文件夹(以单轴运动工程为例)。
7、打开项目后,编译程序,可看到该例程控制台程序界面如图。
在该界面有一个LOCAL连接BUTTON按钮,关联的方法为ZAUX_FastOpen方法,MotionRT7选择用此方式进行连接。
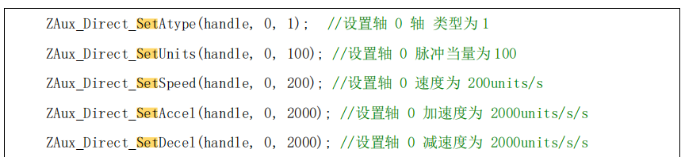
连接上板卡之后,在该界面可先进行对应的轴参数设置,设置完之后轴选择,最后选择运动方式,点击运动即可。
二、相关PC函数介绍
相关PC函数介绍详情可参考“ZMotion PC函数库编程手册 V2.1.1”。
三、RTSys调试与诊断
1、控制器连接
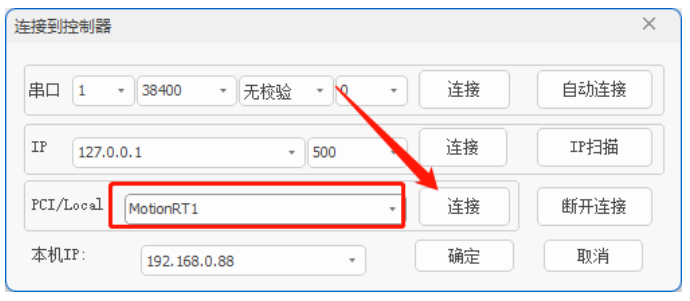
上位机开发的同时,要在RTSys上进行运动监控,首先要连接控制器。打开RTSys软件,点击菜单栏的控制器选项,选择连接。
在弹出连接界面,选择Local,点击连接。
2、轴参数界面
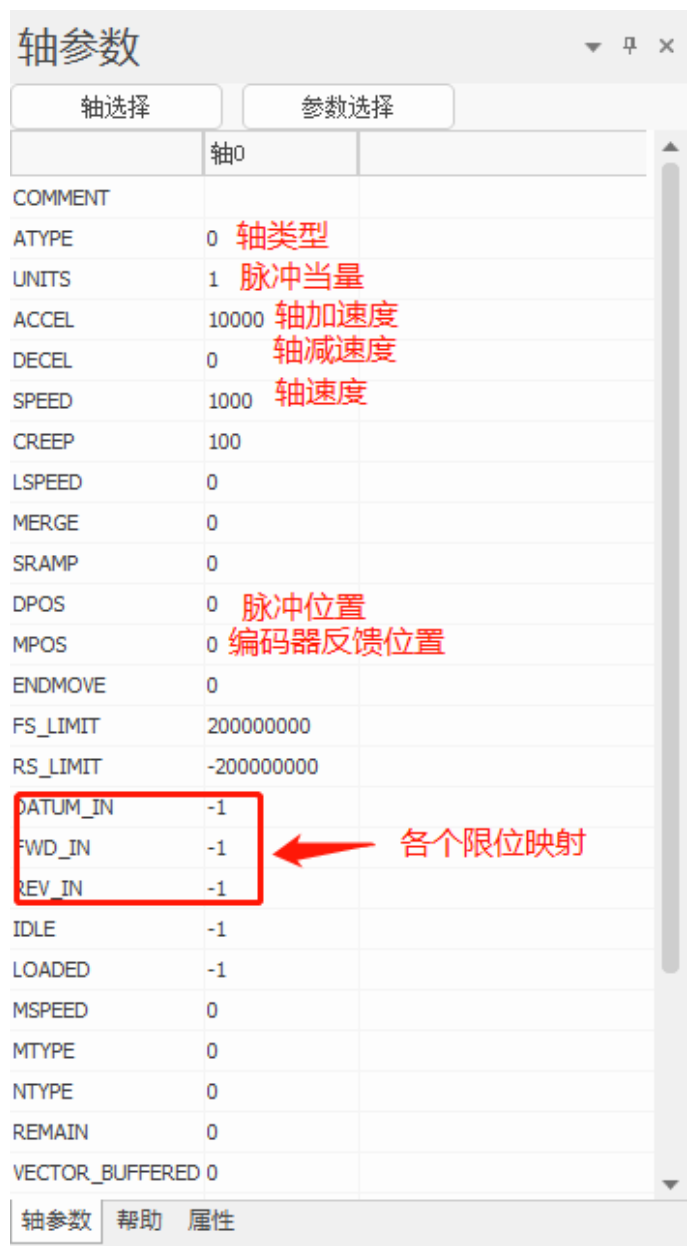
连接成功之后,在界面右侧,会出现一个轴参数界面,这个界面可以实时监控轴的各个参数变化值。
通过上述C#单轴例程进行参数设置之后,RTSys中轴参数会实时同步数据。
此时通过上述C#上位机控制轴运动,在该界面可对轴运行进行实时监控,通过DPOS监控是否有脉冲发出以及MPOS参数监控轴是否有实际动作,是否有位置反馈等。
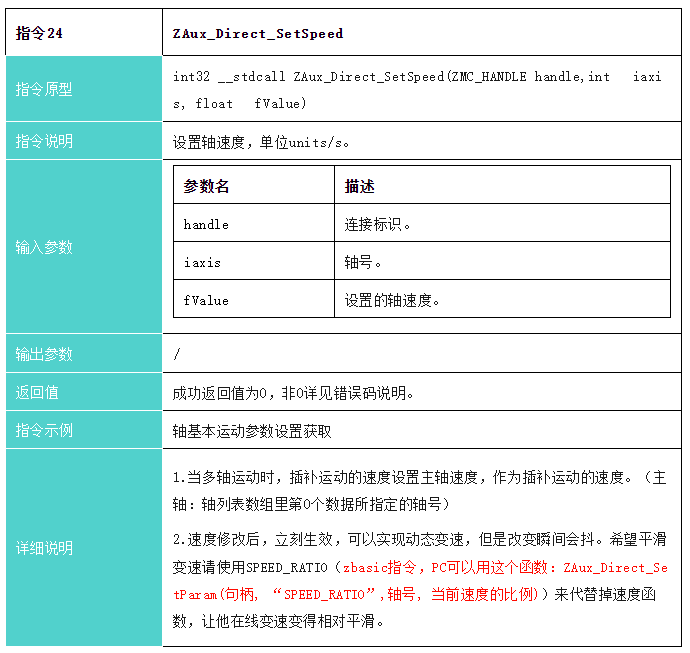
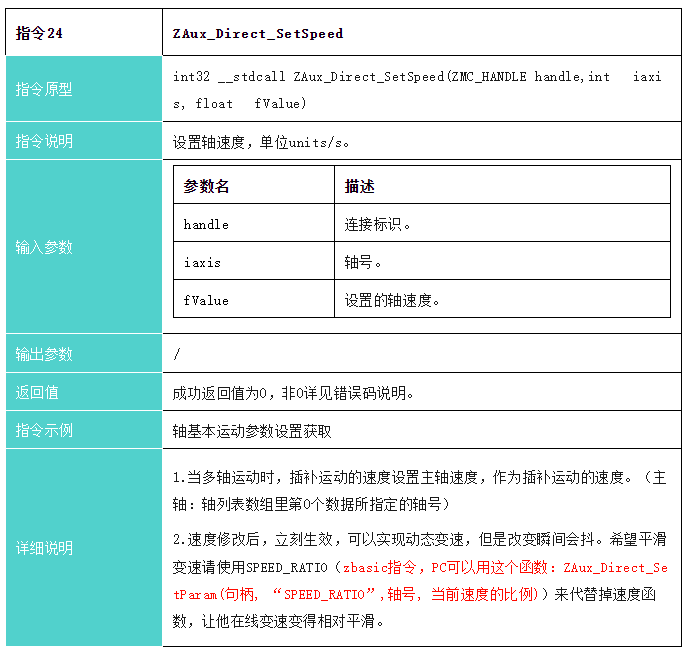
通过ZAux_Direct_SetSpeed指令在上位机设置轴速度之后,实际轴速度变化不大;这个时候,我们可以在轴参数界面找到SPEED值,看是否和上位机设置的值一样,进而排查上位机速度值是否写进去。
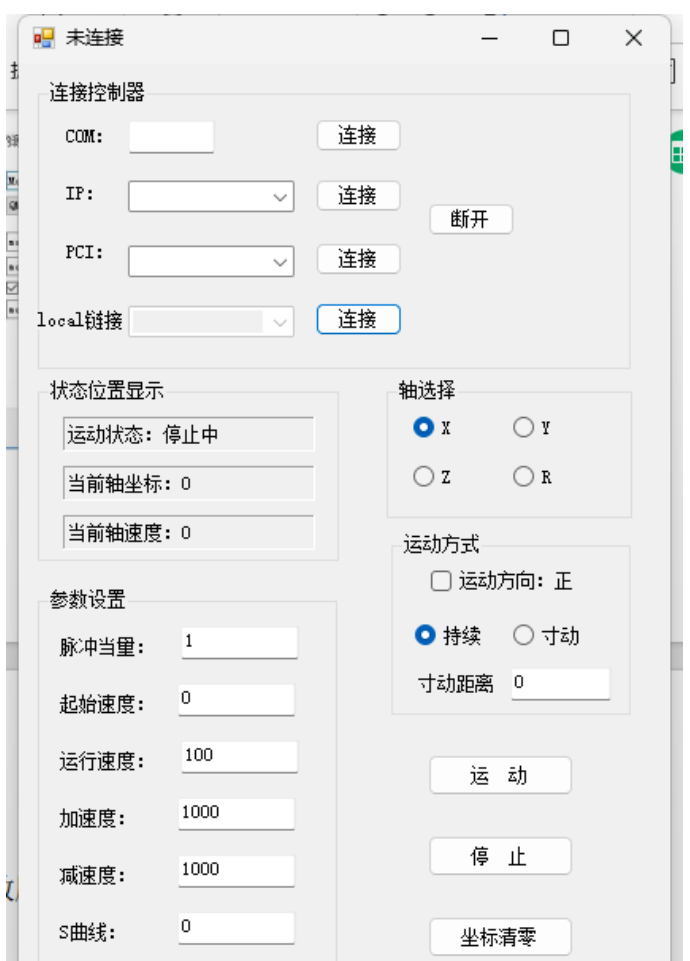
3、手动运动界面
通过RTSys软件进行手动运动调试:
点击RTSys菜单栏的工具按钮,选择手动运动,弹出手动运动界面,功能具体如下图。

4、IO操作界面
点击RTSys菜单栏工具按钮,打开“输入口”和“输出口"界面进行IO口的监控与调试。点击IO选择可手动选择想要监控的IO编号范围。
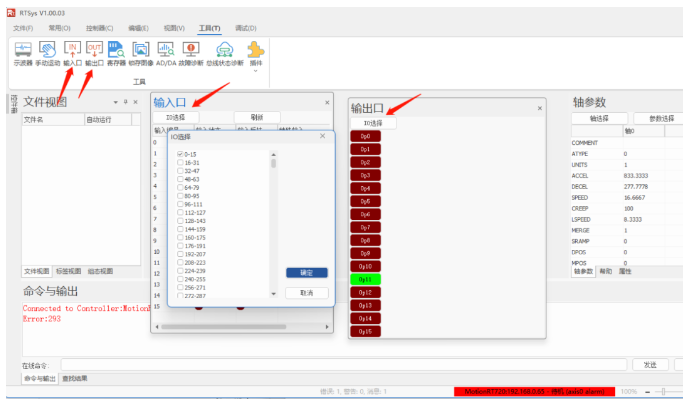
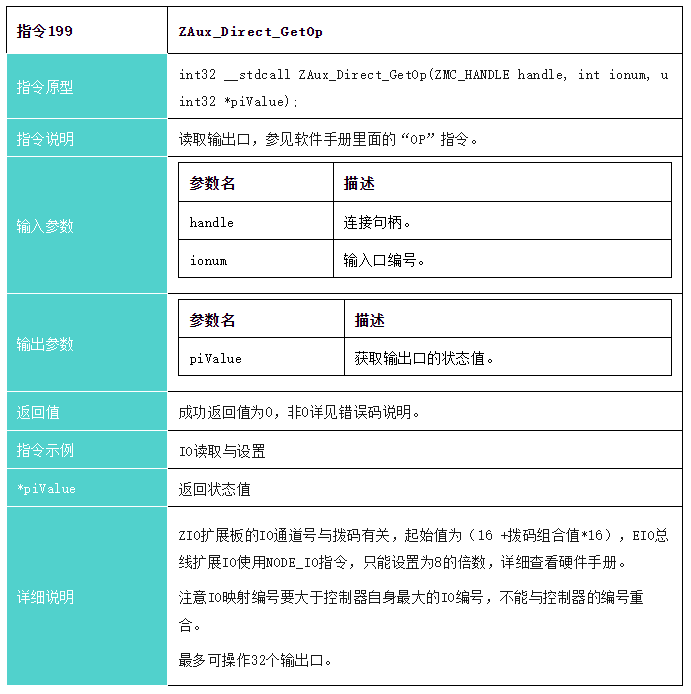
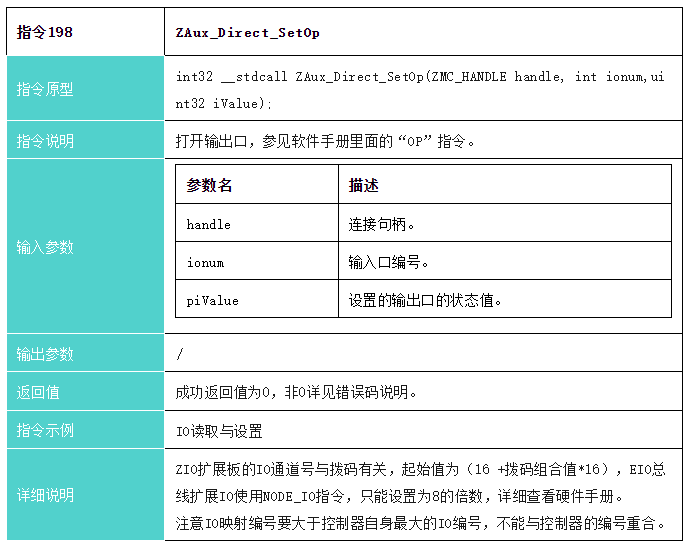
上位机使用ZAux_Direct_GetIn指令读取输入口的状态,通过ZAux_Direct_GetOp指令读取输出口状态以及ZAux_Direct_SetOp指令设置输出口状态。
通过上位机指令设置对应的IO口之后,这时候要确认上位机是否操作成功,打开IO操作界面的输入口和输出口即可对其进行监控与设置。
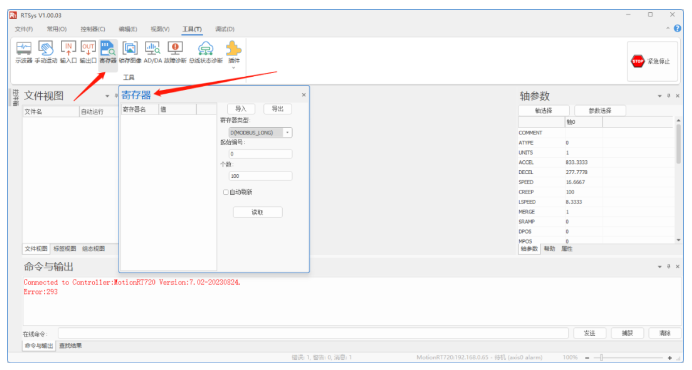
4、寄存器界面
点击RTSys菜单栏的工具,打开寄存器界面,点击该界面的寄存器类型下拉框,可监控或设置MODBUS、VR、TABLE等寄存器的值。
该界面的“起始编号”指监控对应寄存器的起始编号。“个数”表示监控的对应寄存器从起始编号开始,监控的寄存器个数。
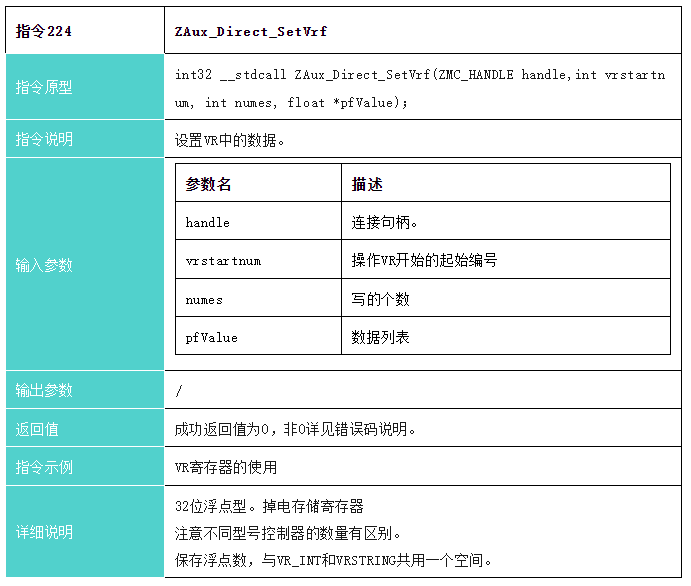
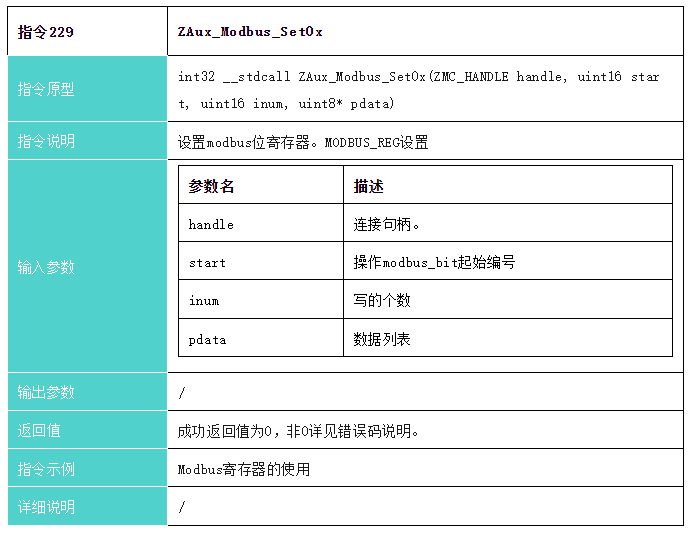
上位机使用ZAux_Direct_MoveTable缓冲修改table寄存器的值,ZAux_Direct_SetVrf指令修改VR寄存器的值,以及ZAux_Modbus_Set0x指令修改modbus位寄存器的值以及其他寄存器的读写操作。上位机设置完对应寄存器之后,便可打开寄存器界面判断相关寄存器的值是否写成功。
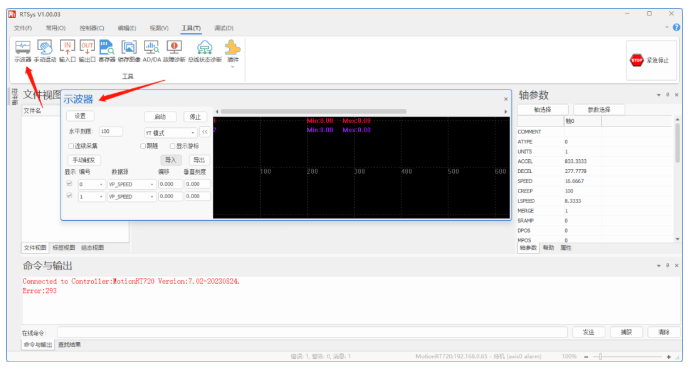
5、示波器界面
点击RTSys菜单栏的工具,打开示波器界面,可对运动过程中的一些参数进行波形的抓取。
示波器的操作方法:在RTSys编写好程序后,成功连接到控制器/仿真器后,打开示波器,设置好所需采集的数据源及对应编号,点击“启动”,再将程序下载至RAM/ROM(上位机编程直接编译运行上位机代码),即可采样
按以上操作程序里需加入“TRIGGER”指令自动触发示波器采样。否则,需在点击“启动”后,点击“手动触发”再下载程序至RAM/ROM才可成功采样。
示波器界面功能说明:
(1)设置:打开示波器设置窗口,设置示波器相关参数。
(2)启动:启动示波器(但不触发示波器采样)。
(3)停止:停止示波器采样。
(4)YT模式:有三种模式可切换,包括YT模式、XY模式、XYZ模式。切换成XY模式即XY平面显示两个轴的插补合成轨迹。XYZ模式即XYZ三维平面显示合成轨迹。
(5)<<:按下隐藏通道名称和峰值,只显示通道编号。
(6)连续采集:不开启连续采集时,到达采集深度后便停止采集,开启了连续采集之后示波器会持续采样。
(7)跟随:开启跟随后横轴自动移动到实时采样处,跟随波形显示。
(8)显示游标:用于标定测量示波器图形数据或者是坐标距离。在YT模式中使用该工具可测量两点之间所用时间,在XY模式中则测量坐标间距。X1和X2游标线与波形相交的交点横坐标即为通道(x)显示的数据,Y1和Y2游标线与波形相交的交点纵坐标即为通道(Y)显示的数据。
(9)手动触发:手动触发示波器采样按钮(自动触发使用trigger指令)。
(10)显示:选择当前通道曲线是否显示。
(11)编号:选择需要采集的数据源编号,如轴号、数字量IO编号、TABLE编号、VR编号、MODBUS编号等。
(12)数据源:选择采集的数据类型,下拉菜单选择,多种类型参数可选。
(13)偏移:波形纵轴偏移量设置。
(14)垂至刻度:纵轴一格的刻度。
(15)水平刻度:横轴一格的刻度。
注:若要设置示波器参数,如轴编号、数据源以及启动示波器设置窗口,要先停止示波器再设置。
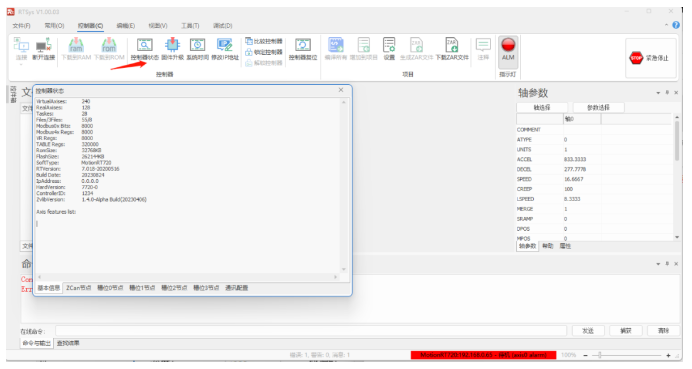
6、控制器状态
点击RTSys菜单栏的控制器选项,点击控制器状态,打开控制器状态显示窗口。该状态包括基本信息、Zcan节点信息、槽位0节点信息、控制器通讯配置等内容。
(1)基本信息:包括控制器型号、支持最大任务数、IP地址、软硬件版本号等控制器基本信息。
(2)Zcan节点:在该界面可显示控制器的本地资源,包括轴数、数字量个数以及模拟量个数,还可显示通过CAN接口扩展的板卡信息。
(3)槽位0节点:显示通过EtherCat口所接的设备的节点号、设备ID、拨码号等信息。
(4)控制器通讯配置:显示CAN信息与RS232、RS485、RS422串口配置信息。
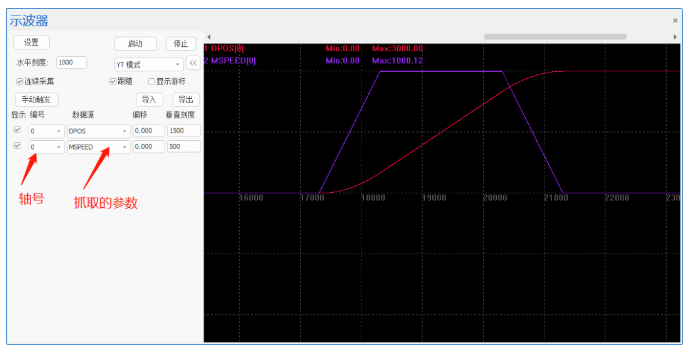
使用上述上位机单轴运动例程抓取轴0指令位置(DPOS)以及轴实际反馈速度(MSPEED)曲线时,先打开示波器界面,设置好抓取的轴号,以及选择需要抓取的参数,设置完成之后,选择YT模式,点击启动,点击手动触发,最后运行上位机程序,抓取波形图如下所示。
本次,正运动技术EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(五):通过RTSys进行调试与诊断,就分享到这里。更多精彩内容请关注“正运动小助手”公众号。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
运动控制器
+关注
关注
2文章
417浏览量
24886 -
运动控制卡
+关注
关注
7文章
114浏览量
15576 -
ethercat
+关注
关注
19文章
788浏览量
39081
发布评论请先 登录
相关推荐
EtherCAT运动控制卡XPCIE1032H上位机开发(一):驱动安装

单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)



不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!

XPCIE1028超高速实时运动控制卡简介和应用案例

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡(二):EtherCAT总线初始化

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论