 FreeRTOS信号量的使用与实例
FreeRTOS信号量的使用与实例
在嵌入式系统中,任务管理是一个重要的部分,它涉及到任务之间的通信和同步,信号量,队列,互斥锁和事件标志组等概念。本文将以 FreeRTOS 为例,详细讲解这些内容。
1. 任务间通信与同步概述
在 FreeRTOS 中,任务是由一个或多个函数组成的独立的执行流,它们可以独立的运行和调度。任务之间的通信和同步是任务管理的核心内容之一。任务间的通信是指一个任务向另一个任务传递信息,而同步则是指多个任务按照一定的顺序执行。FreeRTOS 提供了多种任务间通信和同步的机制,包括信号量,队列,互斥锁和事件标志组等。
2. 信号量的使用与实例
信号量(Semaphore)是 FreeRTOS 中一种常用的同步机制,主要用于任务间和中断服务例程(ISR)间的通信。它们被用来保护共享资源,使得只有一个任务或者中断服务例程可以访问共享资源,避免了资源冲突的问题。
FreeRTOS 中的信号量主要有两种类型:计数信号量和二值信号量。
- 计数信号量(Counting Semaphore):是一种可以持有多个“计数”或者“票”的信号量。例如,如果你有一些共享资源,每个资源都需要独立的访问控制,你就可以使用一个初始计数等于资源数量的计数信号量。当一个任务需要访问一个资源时,它会尝试“获取”一个信号量。如果信号量计数大于 0,那么信号量计数减 1,任务继续执行。如果计数为 0,那么任务就会阻塞,直到信号量计数大于 0。当任务不再需要访问资源时,它应该“释放”信号量,信号量计数加 1。
- 二值信号量(Binary Semaphore):是一种只有两个值(
0和1)的特殊信号量。它通常被用作任务之间或者任务与中断服务例程之间的同步机制。当信号量的值为1时,任务可以获取信号量并继续执行。当信号量的值为0时,任务尝试获取信号量会被阻塞,直到信号量的值变为1。二值信号量也可以被用作互斥量(Mutex),用于保护共享资源的访问。
在 FreeRTOS 中,信号量的操作主要有创建(xSemaphoreCreateBinary, xSemaphoreCreateCounting等函数)、获取(xSemaphoreTake函数)和释放(xSemaphoreGive函数)。在中断服务例程中,获取和释放信号量的函数有所不同,分别为xSemaphoreTakeFromISR和xSemaphoreGiveFromISR。
示例
计数信号量
假设有两个任务 TaskA 和 TaskB,TaskA 负责发送数据,TaskB 负责接收数据。我们使用计数信号量来实现 TaskA 和 TaskB 之间的同步。
首先,在 FreeRTOS 中创建一个计数信号量:
SemaphoreHandle_t xSemaphore;
xSemaphore = xSemaphoreCreateCounting(10, 0); // 创建一个计数信号量,初始计数值为0,最大计数值为10
接下来,在 TaskA 中发送数据时获取计数信号量:
void TaskA(void *pvParameters) {
while (1) {
// 发送数据
...
// 获取计数信号量,如果计数值为0,则任务被阻塞
xSemaphoreTake(xSemaphore, portMAX_DELAY);
}
}
在 TaskB 中接收数据时释放计数信号量:
void TaskB(void *pvParameters) {
while (1) {
// 接收数据
...
// 释放计数信号量,增加计数值
xSemaphoreGive(xSemaphore);
}
}
在上述代码中,当 TaskA 发送数据时,它会获取计数信号量,如果计数值为 0,则 TaskA 会被阻塞,直到 TaskB 接收数据并释放计数信号量为止。当 TaskB 释放计数信号量后,计数值增加,TaskA 可以继续执行发送数据的操作。
这样,使用计数信号量可以实现 TaskA 和 TaskB 之间的同步,保证 TaskA 在 TaskB 完成接收数据后才进行发送数据的操作,避免了数据的丢失和冲突。
二值信号量
二值信号量(Binary Semaphore)是一种用于任务间同步和互斥的机制。它只有两个状态,可以是空闲或者被占用,类似于互斥锁。
下面是一个使用二值信号量的示例:
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
// 创建一个二值信号量
SemaphoreHandle_t binarySemaphore;
// 任务1
void task1(void *pvParameters)
{
while (1)
{
// 等待二值信号量
xSemaphoreTake(binarySemaphore, portMAX_DELAY);
// 执行任务1的操作
// ...
// 释放二值信号量
xSemaphoreGive(binarySemaphore);
// 延时一段时间
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
// 任务2
void task2(void *pvParameters)
{
while (1)
{
// 等待二值信号量
xSemaphoreTake(binarySemaphore, portMAX_DELAY);
// 执行任务2的操作
// ...
// 释放二值信号量
xSemaphoreGive(binarySemaphore);
// 延时一段时间
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
int main()
{
// 创建二值信号量
binarySemaphore = xSemaphoreCreateBinary();
// 创建任务1
xTaskCreate(task1, "Task 1", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// 创建任务2
xTaskCreate(task2, "Task 2", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// 启动任务调度器
vTaskStartScheduler();
return 0;
}
在上面的示例中,首先创建了一个二值信号量binarySemaphore,然后创建了两个任务task1和task2。这两个任务都会在一个无限循环中执行,首先等待二值信号量,然后执行自己的操作,最后释放二值信号量。
当一个任务等待二值信号量时,如果二值信号量的状态是空闲(未被占用),则任务可以获取到该信号量,继续执行自己的操作。如果二值信号量的状态是被占用(已经有任务获取到了信号量),则任务会一直等待,直到信号量被释放。
需要注意的是,当一个任务获取到二值信号量后,其他任务将无法获取到该信号量,直到该任务释放信号量。这就保证了任务之间的互斥性。
通过使用二值信号量,可以实现任务间的同步和互斥操作,确保多个任务按照特定的顺序执行或者避免资源的竞争。
3. 队列的使用与实例
队列是一种数据结构,它允许任务按照先进先出(FIFO)的原则将数据项插入队列和从队列中获取数据项。在 FreeRTOS 中,可以使用 xQueueCreate()函数来创建一个队列。
示例:
QueueHandle_t xQueue;
void vProducerTask(void pvParameters)
{
int32_t lValueToSend;
BaseType_t xStatus;
lValueToSend = (int32_t) pvParameters;
for(;;)
{
xStatus = xQueueSendToBack(xQueue, &lValueToSend, 0);
if(xStatus != pdPASS)
{
printf("Could not send to the queue.n");
}
}
}
在这个例子中,vProducerTask 任务将数据项发送到队列的尾部。如果发送成功,xQueueSendToBack()函数将返回 pdPASS,否则,将返回一个错误代码。
4. 互斥锁的使用与实例
互斥锁是一种用于保护共享资源的机制。当一个任务需要使用一个共享资源时,它必须首先获取互斥锁。如果互斥锁已经被另一个任务获取,那么这个任务就需要等待,直到互斥锁被释放。在 FreeRTOS 中,可以使用 xSemaphoreCreateMutex()函数来创建一个互斥锁。
示例:
SemaphoreHandle_t xMutex;
void vTask(void pvParameters)
{
for(;;)
{
if(xSemaphoreTake(xMutex, (TickType_t)10) == pdTRUE)
{
// The mutex was successfully taken, so the shared resource can be accessed.
printf("Task: Mutex taken!n");
// ...
// Access the shared resource.
// ...
// Release the mutex.
xSemaphoreGive(xMutex);
}
else
{
// The mutex could not be taken.
printf("Task: Mutex not taken!n");
}
}
}
在这个例子中,vTask 任务尝试获取一个互斥锁。如果成功,它将访问一个共享资源,然后释放互斥锁。
5. 事件标志组的使用与实例
事件标志组是一种用于表示一组事件发生状态的数据结构。每一个事件都有一个对应的标志,当事件发生时,标志被设置,当事件被处理时,标志被清除。在 FreeRTOS 中,可以使用 xEventGroupCreate()函数来创建一个事件标志组。
示例:
EventGroupHandle_t xEventGroup;
void vTask(void pvParameters)
{
EventBits_t uxBits;
for(;;)
{
uxBits = xEventGroupWaitBits(
xEventGroup, // The event group being tested.
BIT_0 | BIT_4, // The bits within the event group to wait for.
pdTRUE, // BIT_0 & BIT_4 should be cleared before returning.
pdFALSE, // Don't wait for both bits, either bit will do.
portMAX_DELAY // Wait a maximum for either bit to be set.
);
if((uxBits & (BIT_0 | BIT_4)) == (BIT_0 | BIT_4))
{
// Both bits were set.
printf("Task: Both bits were set!n");
}
else if((uxBits & BIT_0) != 0)
{
// Bit 0 was set.
printf("Task: Bit 0 was set!n");
}
else if((uxBits & BIT_4) != 0)
{
// Bit 4 was set.
printf("Task: Bit 4 was set!n");
}
else
{
// Neither bit was set.
printf("Task: Neither bit was set!n");
}
}
}
在这个例子中,vTask 任务等待事件标志组中的任何一个事件发生。如果两个事件都发生,它将打印出"Both bits were set!",如果只有一个事件发生,它将打印出对应的消息。
6. 信号量 vs 互斥锁
信号量(Semaphore)和互斥锁(Mutex)都是多任务环境下保护共享资源的一种方法,它们之间存在一些区别:
- 互斥锁是一种所有权的概念,即一个任务获取了互斥锁后,只有它自己可以释放这个互斥锁,其他任务不能释放。而信号量没有所有权的概念,任何任务都可以释放信号量。
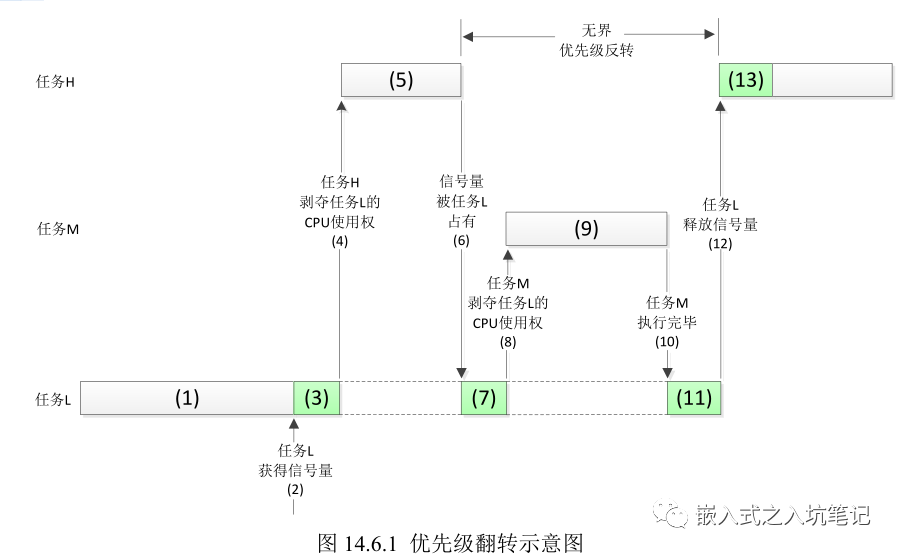
- 在 FreeRTOS 中,互斥锁有优先级反转的解决机制,当一个低优先级的任务获取了互斥锁,而高优先级的任务需要这个互斥锁时,低优先级的任务的优先级会被提升,以减少优先级反转的问题。而信号量没有这个机制。
- 互斥锁通常用于保护共享资源,即在同一时间只能有一个任务访问某个资源。信号量则更多是用于任务同步,它可以被用来唤醒一个或多个等待的任务。
- 在 FreeRTOS 中,信号量可以有计数的概念,即可以被“给”多次,每次“给”都会增加一个计数,而互斥锁没有这个概念,它只有锁定和解锁两种状态。
- 信号量可以被用作二元信号量(即只有两种状态,
0和1,类似互斥锁),而互斥锁不能被用作计数信号量。
总结
在 FreeRTOS 中,任务间的通信和同步是一个重要的部分,它涉及到信号量,队列,互斥锁和事件标志组等概念。通过理解和掌握这些概念,可以有效地管理和调度任务,提高系统的效率和稳定性。
FreeRTOS 任务间通信与同步
在嵌入式系统中,任务管理是一个重要的部分,它涉及到任务之间的通信和同步,信号量,队列,互斥锁和事件标志组等概念。本文将以 FreeRTOS 为例,详细讲解这些内容。
1. 任务间通信与同步概述
在 FreeRTOS 中,任务是由一个或多个函数组成的独立的执行流,它们可以独立的运行和调度。任务之间的通信和同步是任务管理的核心内容之一。任务间的通信是指一个任务向另一个任务传递信息,而同步则是指多个任务按照一定的顺序执行。FreeRTOS 提供了多种任务间通信和同步的机制,包括信号量,队列,互斥锁和事件标志组等。
2. 信号量的使用与实例
信号量(Semaphore)是 FreeRTOS 中一种常用的同步机制,主要用于任务间和中断服务例程(ISR)间的通信。它们被用来保护共享资源,使得只有一个任务或者中断服务例程可以访问共享资源,避免了资源冲突的问题。
FreeRTOS 中的信号量主要有两种类型:计数信号量和二值信号量。
- 计数信号量(Counting Semaphore):是一种可以持有多个“计数”或者“票”的信号量。例如,如果你有一些共享资源,每个资源都需要独立的访问控制,你就可以使用一个初始计数等于资源数量的计数信号量。当一个任务需要访问一个资源时,它会尝试“获取”一个信号量。如果信号量计数大于 0,那么信号量计数减 1,任务继续执行。如果计数为 0,那么任务就会阻塞,直到信号量计数大于 0。当任务不再需要访问资源时,它应该“释放”信号量,信号量计数加 1。
- 二值信号量(Binary Semaphore):是一种只有两个值(
0和1)的特殊信号量。它通常被用作任务之间或者任务与中断服务例程之间的同步机制。当信号量的值为1时,任务可以获取信号量并继续执行。当信号量的值为0时,任务尝试获取信号量会被阻塞,直到信号量的值变为1。二值信号量也可以被用作互斥量(Mutex),用于保护共享资源的访问。
在 FreeRTOS 中,信号量的操作主要有创建(xSemaphoreCreateBinary, xSemaphoreCreateCounting等函数)、获取(xSemaphoreTake函数)和释放(xSemaphoreGive函数)。在中断服务例程中,获取和释放信号量的函数有所不同,分别为xSemaphoreTakeFromISR和xSemaphoreGiveFromISR。
示例
计数信号量
假设有两个任务 TaskA 和 TaskB,TaskA 负责发送数据,TaskB 负责接收数据。我们使用计数信号量来实现 TaskA 和 TaskB 之间的同步。
首先,在 FreeRTOS 中创建一个计数信号量:
SemaphoreHandle_t xSemaphore;
xSemaphore = xSemaphoreCreateCounting(10, 0); // 创建一个计数信号量,初始计数值为0,最大计数值为10
接下来,在 TaskA 中发送数据时获取计数信号量:
void TaskA(void *pvParameters) {
while (1) {
// 发送数据
...
// 获取计数信号量,如果计数值为0,则任务被阻塞
xSemaphoreTake(xSemaphore, portMAX_DELAY);
}
}
在 TaskB 中接收数据时释放计数信号量:
void TaskB(void *pvParameters) {
while (1) {
// 接收数据
...
// 释放计数信号量,增加计数值
xSemaphoreGive(xSemaphore);
}
}
在上述代码中,当 TaskA 发送数据时,它会获取计数信号量,如果计数值为 0,则 TaskA 会被阻塞,直到 TaskB 接收数据并释放计数信号量为止。当 TaskB 释放计数信号量后,计数值增加,TaskA 可以继续执行发送数据的操作。
这样,使用计数信号量可以实现 TaskA 和 TaskB 之间的同步,保证 TaskA 在 TaskB 完成接收数据后才进行发送数据的操作,避免了数据的丢失和冲突。
二值信号量
二值信号量(Binary Semaphore)是一种用于任务间同步和互斥的机制。它只有两个状态,可以是空闲或者被占用,类似于互斥锁。
下面是一个使用二值信号量的示例:
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
// 创建一个二值信号量
SemaphoreHandle_t binarySemaphore;
// 任务1
void task1(void *pvParameters)
{
while (1)
{
// 等待二值信号量
xSemaphoreTake(binarySemaphore, portMAX_DELAY);
// 执行任务1的操作
// ...
// 释放二值信号量
xSemaphoreGive(binarySemaphore);
// 延时一段时间
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
// 任务2
void task2(void *pvParameters)
{
while (1)
{
// 等待二值信号量
xSemaphoreTake(binarySemaphore, portMAX_DELAY);
// 执行任务2的操作
// ...
// 释放二值信号量
xSemaphoreGive(binarySemaphore);
// 延时一段时间
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
int main()
{
// 创建二值信号量
binarySemaphore = xSemaphoreCreateBinary();
// 创建任务1
xTaskCreate(task1, "Task 1", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// 创建任务2
xTaskCreate(task2, "Task 2", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// 启动任务调度器
vTaskStartScheduler();
return 0;
}
在上面的示例中,首先创建了一个二值信号量binarySemaphore,然后创建了两个任务task1和task2。这两个任务都会在一个无限循环中执行,首先等待二值信号量,然后执行自己的操作,最后释放二值信号量。
当一个任务等待二值信号量时,如果二值信号量的状态是空闲(未被占用),则任务可以获取到该信号量,继续执行自己的操作。如果二值信号量的状态是被占用(已经有任务获取到了信号量),则任务会一直等待,直到信号量被释放。
需要注意的是,当一个任务获取到二值信号量后,其他任务将无法获取到该信号量,直到该任务释放信号量。这就保证了任务之间的互斥性。
通过使用二值信号量,可以实现任务间的同步和互斥操作,确保多个任务按照特定的顺序执行或者避免资源的竞争。
3. 队列的使用与实例
队列是一种数据结构,它允许任务按照先进先出(FIFO)的原则将数据项插入队列和从队列中获取数据项。在 FreeRTOS 中,可以使用 xQueueCreate()函数来创建一个队列。
示例:
QueueHandle_t xQueue;
void vProducerTask(void pvParameters)
{
int32_t lValueToSend;
BaseType_t xStatus;
lValueToSend = (int32_t) pvParameters;
for(;;)
{
xStatus = xQueueSendToBack(xQueue, &lValueToSend, 0);
if(xStatus != pdPASS)
{
printf("Could not send to the queue.n");
}
}
}
在这个例子中,vProducerTask 任务将数据项发送到队列的尾部。如果发送成功,xQueueSendToBack()函数将返回 pdPASS,否则,将返回一个错误代码。
4. 互斥锁的使用与实例
互斥锁是一种用于保护共享资源的机制。当一个任务需要使用一个共享资源时,它必须首先获取互斥锁。如果互斥锁已经被另一个任务获取,那么这个任务就需要等待,直到互斥锁被释放。在 FreeRTOS 中,可以使用 xSemaphoreCreateMutex()函数来创建一个互斥锁。
示例:
SemaphoreHandle_t xMutex;
void vTask(void pvParameters)
{
for(;;)
{
if(xSemaphoreTake(xMutex, (TickType_t)10) == pdTRUE)
{
// The mutex was successfully taken, so the shared resource can be accessed.
printf("Task: Mutex taken!n");
// ...
// Access the shared resource.
// ...
// Release the mutex.
xSemaphoreGive(xMutex);
}
else
{
// The mutex could not be taken.
printf("Task: Mutex not taken!n");
}
}
}
在这个例子中,vTask 任务尝试获取一个互斥锁。如果成功,它将访问一个共享资源,然后释放互斥锁。
5. 事件标志组的使用与实例
事件标志组是一种用于表示一组事件发生状态的数据结构。每一个事件都有一个对应的标志,当事件发生时,标志被设置,当事件被处理时,标志被清除。在 FreeRTOS 中,可以使用 xEventGroupCreate()函数来创建一个事件标志组。
示例:
EventGroupHandle_t xEventGroup;
void vTask(void pvParameters)
{
EventBits_t uxBits;
for(;;)
{
uxBits = xEventGroupWaitBits(
xEventGroup, // The event group being tested.
BIT_0 | BIT_4, // The bits within the event group to wait for.
pdTRUE, // BIT_0 & BIT_4 should be cleared before returning.
pdFALSE, // Don't wait for both bits, either bit will do.
portMAX_DELAY // Wait a maximum for either bit to be set.
);
if((uxBits & (BIT_0 | BIT_4)) == (BIT_0 | BIT_4))
{
// Both bits were set.
printf("Task: Both bits were set!n");
}
else if((uxBits & BIT_0) != 0)
{
// Bit 0 was set.
printf("Task: Bit 0 was set!n");
}
else if((uxBits & BIT_4) != 0)
{
// Bit 4 was set.
printf("Task: Bit 4 was set!n");
}
else
{
// Neither bit was set.
printf("Task: Neither bit was set!n");
}
}
}
在这个例子中,vTask 任务等待事件标志组中的任何一个事件发生。如果两个事件都发生,它将打印出"Both bits were set!",如果只有一个事件发生,它将打印出对应的消息。
6. 信号量 vs 互斥锁
信号量(Semaphore)和互斥锁(Mutex)都是多任务环境下保护共享资源的一种方法,它们之间存在一些区别:
- 互斥锁是一种所有权的概念,即一个任务获取了互斥锁后,只有它自己可以释放这个互斥锁,其他任务不能释放。而信号量没有所有权的概念,任何任务都可以释放信号量。
- 在 FreeRTOS 中,互斥锁有优先级反转的解决机制,当一个低优先级的任务获取了互斥锁,而高优先级的任务需要这个互斥锁时,低优先级的任务的优先级会被提升,以减少优先级反转的问题。而信号量没有这个机制。
- 互斥锁通常用于保护共享资源,即在同一时间只能有一个任务访问某个资源。信号量则更多是用于任务同步,它可以被用来唤醒一个或多个等待的任务。
- 在 FreeRTOS 中,信号量可以有计数的概念,即可以被“给”多次,每次“给”都会增加一个计数,而互斥锁没有这个概念,它只有锁定和解锁两种状态。
- 信号量可以被用作二元信号量(即只有两种状态,
0和1,类似互斥锁),而互斥锁不能被用作计数信号量。
总结
在 FreeRTOS 中,任务间的通信和同步是一个重要的部分,它涉及到信号量,队列,互斥锁和事件标志组等概念。通过理解和掌握这些概念,可以有效地管理和调度任务,提高系统的效率和稳定性。
-
嵌入式系统
+关注
关注
41文章
3650浏览量
130297 -
中断
+关注
关注
5文章
901浏览量
42124 -
FreeRTOS
+关注
关注
12文章
484浏览量
63065 -
信号量
+关注
关注
0文章
53浏览量
8423
发布评论请先 登录
相关推荐
实时操作系统FreeRTOS信号量应用


FreeRTOS信号量使用教程
转:freeRTOS信号量学习
转:第21章 FreeRTOS计数信号量
Linux信号量(2):POSIX 信号量
FreeRTOS信号量 & ESP32实战

FreeRTOS 队列 信号量 互斥量
FreeRTOS系列第20篇---FreeRTOS信号量API函数
freeRTOS中最常用到的信号量有哪些





 工商网监
工商网监
评论