 Fpga Verilog SDRAM模块—单字读写案例
Fpga Verilog SDRAM模块—单字读写案例
笔者与SDRAM有段不短的孽缘,它作为冤魂日夜不断纠缠笔者。笔者尝试过许多方法将其退散,不过屡试屡败的笔者,最终心情像橘子一样橙。
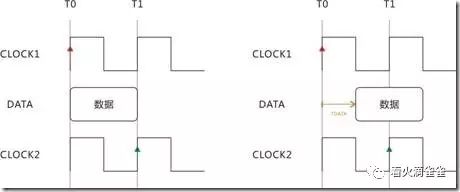
图18.1 数据读取(理想时序左,物理时序右)。
首先,让我们来了解一下,什么才是数据读取的最佳状态?如图18.1所示,红色箭头是上升沿,绿色箭头是锁存沿。左图是理想时序读取数据的最佳状态,即T0发送数据,T1锁存数据。右图则是物理时序读取数据的最佳状态,即T0发送数据,然后数据经由 TDATA延迟,然后T1锁存数据。理想状态下,读取数据不用考虑任何物理因数,凡是过去值都会读取成功。
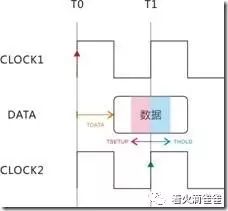
图18.2 读取数据(物理时序)。
然而物理状态下,读取数据则必须考虑物理因数,但是物理时序也有所谓的理想状态,即数据被TDATA推挤,然后恰好停留在锁存沿的正中间。该状态之所以称为理想,那是因为建立时间TSETUP与保持时间THOLD都被满足。
如图18.2所示,TSETUP从数据中间向左边覆盖,THOLD从数据中间向右边覆盖,如果两者不完全覆盖数据,那么数据的有效性就能得到保证。简言之,数据是否读取成功,建立时间还有保持时间都必须得到满足。但是我们也知道,Verilog不能描述理想以外的东西,即Verilog无力描述TDATA。话虽如此,我们可以改变时钟位移来达到同样的效果。
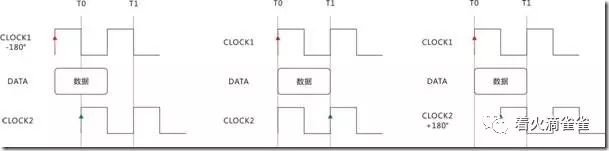
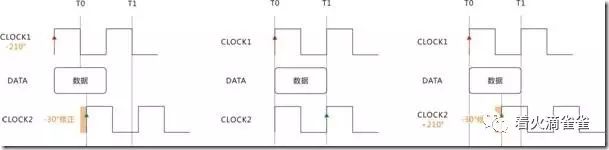
图18.3 CLOCK1位移 -180°(左图),没有位移(中图),CLOCK2 位移 +180°(右图),以及修正结果。
常见的理想时序,最多适用在FPGA的内部而已。当描述功活动涉及FPGA的外部,那么理想时序必须考虑对外的情况。如图18.3所示,中间的理想时序图可以经由 CLOCK1 位移 -180°,又或者 CLOCK2 位移 +180° 来得到同样的效果。虽说180° 的位移是理想效果,但是我们还要考虑物理路径所带来的影响。根据Alinix 301这只开发板,我们必须追加 -30° 位移才能达到修正的效果。(注意:追加-30° 的修正时序仅仅为适用Alinix 301这只板子而已)。理解完毕以后,我们便可进入正题。
驱动SDRAM而言,简单可以分为以下四项操作:
(一)初始化
(二)刷新操作
(三)读操作
(四)写操作
初始化令SDRAM就绪,刷新操作就是不失掉内容(数据),读操作就是从SDRAM哪里读取数据,写操作就是向SDRAM写数据。其中,读写操作又有单字读写,多字读写还有页读写。
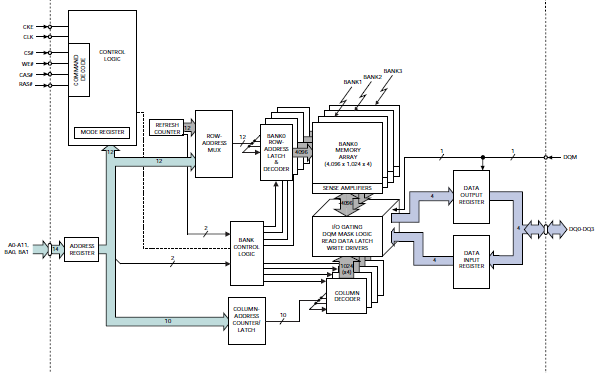
首先,让我们来分析一下Alinx 开发板上HY57V2562GTR 这只SDRAM。根据手册,这只SDRAM有256Mb的容量,4个BANK(即一个BANK为64Mb),频率极限为200Mhz,数据保留周期为 8192 / 64ms。至于引脚定义如表18.1所示:
表18.1 SDRAM的引脚定义
| 分类 | 标示 | 信号 | 说明 |
| 时钟信号 | CLK | S_CLK | 时钟源 |
| 地址信号 | BA0~1 | S_BA[1:0] | BANK地址 |
| A0~A12 | S_A[12:0] | 读写地址,行列共用,A0~A12为行地址,CA0~CA8为列地址 | |
| 命令信号 | CKE | S_CKE, | 时钟选,拉高有效 |
| CS | S_NCS, | 片选,拉低有效 | |
| RAS | S_NRAS, | 命令选,拉低有效 | |
| CAS | S_NCAS, | 命令选,拉低有效 | |
| WE | S_NWE | 命令选,拉低有效 | |
| 数据信号 | DQ0~DQ15 | S_DQ[15:0] | 读写数据的IO |
| LDQM,UDQM | S_DQM[1:0] | 遮盖数据,一般拉低无视 |
如表18.1所示,CLK为SDRAM的时钟源。CKE,CS,RAS,CAS还有WE皆为命令信号,五者相互组合形成以下几个常用命令,结果如表18.2所示:
表18.2 常用命令。
| 命令 | CKE | CS | RAS | CAS | WE | 说明 |
| NOP | 1 | 0 | 1 | 1 | 1 | 空命令 |
| ACT | 1 | 0 | 0 | 1 | 1 | 激活命令,选择Bank地址与行地址 |
| WR | 1 | 0 | 1 | 0 | 0 | 写命令,开始写数据 |
| RD | 1 | 0 | 1 | 0 | 1 | 读命令,开始读数据 |
| BSTP | 1 | 0 | 1 | 1 | 0 | 停止命令,停止读写 |
| PR | 1 | 0 | 0 | 1 | 0 | 预充命令,释放选择 |
| AR | 1 | 0 | 0 | 0 | 1 | 刷新命令,刷新内容 |
| LMR | 1 | 0 | 0 | 0 | 0 | 设置命令,设置SDRAM |
l NOP为No Operation,即空命令,除了给空时间以外没有任何意义。
l ACT为Active,即激活命令,用来选择某Bank某行。
l WR为Write,即写命令,通知设备开始写数据。
l RD为Read,即读命令,通知设备开始读数据。
l BSTP为Burst Stop,即停止命令,禁止设备继续读写。
l PR为 Precharge,即预充命令,用来释放某Bank与某行的选择。
l AR为Auto Refresh,即刷新命令,用来刷新或者更新数据内容。
l LMR为Load Mode Register,即设置命令,用来配置设备参数。
Verilog则可以这样描述这些命令,结果如代码18.1所示:
parameter _INIT = 5'b01111, _NOP = 5'b10111, _ACT = 5'b10011, _RD = 5'b10101, _WR = 5'b10100,
_BSTP = 5'b10110, _PR = 5'b10010, _AR = 5'b10001, _LMR = 5'b10000;
代码18.1
DQ0~DQ15为数据信号。BA0~1与A0~A12皆为地址信号,其中A0~A12行列共用,,然而地址信号可以指向的范围,如下计算:
2(2 Bank + 13 Row + 9 Column)× 16 bit = 224× 16 bit
= 1.6777216e7 × 16 bit // 16M × 16 bit
= 2.68435456e8 bit
= 262144 kbit
= 256 Mbits
初始化:
初始化除了就绪SDRAM以外,我们还要设置SDRAM内部的 Mode Register,设置内容内容如表18.3所示:
表18.3 Mode Register的内容。
| Mode Register | ||||||||||||
| A12 | A11 | A10 | A9 | A8 | A7 | A6 | A5 | A4 | A3 | A2 | A1 | A0 |
| 0 | 0 | OP Code | 0 | 0 | CAS Latency | BT | Burst Length |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
如表18.3所示,设置内容必须经由地址信号A12~A0。其中A2~A0表示字读写的长度,实验十八为单字读写,所以A2~A0设置为3’b000。A3表示读写次序,1’b0表示顺序读写。A6~A4表示 CAS 延迟(也可以视为读出延迟),设为 3’b011是为读出更稳定。A9表示读写模式,一般都是设置为1’b0。
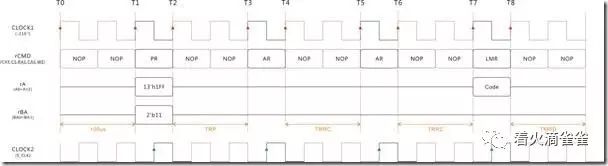
图18.4 初始化的理想时序图。
图18.4是初始化的理想时序图,其中CLOCK1为 -210°的系统时钟,CLOCK2为SDRAM的时钟。rCMD为CKE,CS,RAS,CAS还有WE等命令。rA为A0~A12,rBA为BA0~BA1等地址信号。初始化过程如下所示:
l T0,满足100us;
l T1,发送PR命令,拉高所有rA与rBA。
l T1半周期,SDRAM读取。
l T2,满足TRP;
l T3,发送AR命令。
l T3半周期,SDRAM读取。
l T4,满足TRRC,
l T5,发送AR命令。
l T5半周期,SDRAM读取。
l T6,满足TRRC,
l T7,发送LMR命令与相关Code(设置内容)。
l T7半周期,SDRAM读取。
l T8,满足TMRD。
怎么样?读者是不是觉得很单纯呢?事后,Verilog则可以这样描述,结果如代码18.2所示:
1. case( i )
2.
3. 0: // delay 100us
4. if( C1 == T100US -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
5. else begin C1 <= C1 + 1'b1; end
6.
7. 1: // Send Precharge Command
8. begin rCMD <= _PR; { rBA, rA } <= 15'h3fff; i <= i + 1'b1; end
9.
10. 2: // wait TRP 20ns
11. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
12. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
13.
14. 3: // Send Auto Refresh Command
15. begin rCMD <= _AR; i <= i + 1'b1; end
16.
17. 4: // wait TRRC 63ns
18. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
19. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
20.
21. 5: // Send Auto Refresh Command
22. begin rCMD <= _AR; i <= i + 1'b1; end
23.
24. 6: // wait TRRC 63ns
25. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
26. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
27.
28. 7: // Send LMR Cmd. Burst Read & Write, 3'b011 mean CAS latecy = 3, Sequential, 1 burst length
29. begin rCMD <= _LMR; rBA <= 2'b11; rA <= {3'd0,1'b0,2'd0,3'b011,1'b0, 3'b000}; i <= i + 1'b1; end
30.
31. 8: // Send 2 nop CLK for tMRD
32. if( C1 == TMRD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
33. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
34.
35. 9: // Generate done signal
36. begin isDone <= 1'b1; i <= i + 1'b1; end
37.
38. 10:
39. begin isDone <= 1'b0; i <= 4'd0; end
40.
41. endcase
代码18.2
代码18.2完全按照图18.4去驱动,读者只要将i看为T就万事大吉,其中步骤7发送LMR命令还有设置Code内容。至于步骤8~9则用来产生完成信号。
刷新操作:
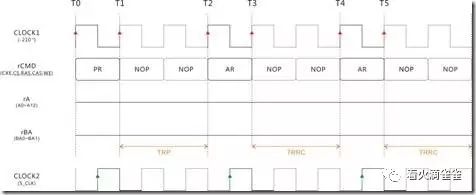
图18.5 刷新操作的理想时序图。
所谓定期刷新就是被宫掉的初始化,如图18.5所示,时序过程如下:
l T0,发送PR命令(拉高所有rA与rBA视喜好而定);
l T0半周期,SDRAM读取。
l T1,满足TRP;
l T2,发送AR命令。
l T2半周期,SDRAM读取。
l T3,满足TRRC,
l T4,发送AR命令。
l T4半周期,SDRAM读取。
l T5,满足TRRC,
Verilog 则可以这样表示,结果如表18.3所示:
1. case( i )
2.
3. 0: // Send Precharge Command
4. begin rCMD <= _PR; i <= i + 1'b1; end
5.
6. 1: // wait TRP 20ns
7. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
8. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
9.
10. 2: // Send Auto Refresh Command
11. begin rCMD <= _AR; i <= i + 1'b1; end
12.
13. 3: // wait TRRC 63ns
14. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
15. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
16.
17. 4: // Send Auto Refresh Command
18. begin rCMD <= _AR; i <= i + 1'b1; end
19.
20. 5: // wait TRRC 63ns
21. if( C1 == TRRC -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
22. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
23.
24. 6: // Generate done signal
25. begin isDone <= 1'b1; i <= i + 1'b1; end
26.
27. 7:
28. begin isDone <= 1'b0; i <= 4'd0; end
29.
30. endcase
代码18.3
除了步骤6~7用来产生完成信号以外,代码18.3都是据图18.5描述。SDRAM储存的内容是非常脆弱的,如果我们不定期刷新内容,该内容有可能会蒸发掉。根据 HY57V2562GTR这只 SDRAM,它的内容储存周期为 8192 / 64ms,然而定期刷新的计算如下:
64ms / 8192 = 7.8125us
换言之,每隔7.8125微妙就要刷新一次所有内容。
写操作:
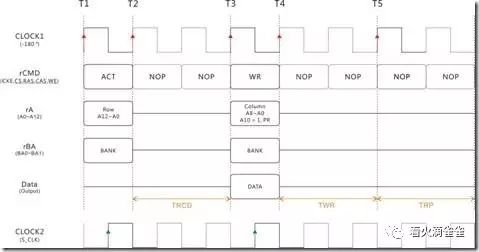
图18.6 写操作的理想时序图。
图18.6是写操作的理想时序图,过程如下:
l T1,发送ACT命令,BANK地址与行地址;
l T1半周期,SDRAM读取;
l T2,满足TRCD;
l T3,发送WR命令,BANK地址与列地址,还有写数据;
l T3半周期,SDRAM读取
l T4,满足TWR;
l T5,满足TRP。
正如前面说过,ACT命令式用来选择BANK地址与行地址,然而关键就在T3。T3除了发送WR命令,列地址,还有些数据以外,A10拉高是为了执行预充电。所谓预充电就是释放BANK地址,行地址与列地址等的选择。因此,满足TWR以后,我们还要满足TRP的释放时间,好让SDRAM有足够的时间自行释放选择。
Verilog则可以这样描述,结果如代码18.4所示:
1. case( i )
2.
3. 0: // Set IO to output State
4. begin isOut <= 1'b1; i <= i + 1'b1; end
5.
6. 1: // Send Active Command with Bank and Row address
7. begin rCMD <= _ACT; rBA <= iAddr[23:22]; rA <= iAddr[21:9]; i <= i + 1'b1; end
8.
9. 2: // wait TRCD 20ns
10. if( C1 == TRCD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
11. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
12.
13. 3: // Send Write cmd with row address, pull up A10 1 clk to PR
14. begin rCMD <= _WR; rBA <= iAddr[23:22]; rA <= { 4'b0010, iAddr[8:0] }; i <= i + 1'b1; end
15.
16. 4: // wait TWR 2 clock
17. if( C1 == TWR -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
18. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
19.
20. 5: // wait TRP 20ns
21. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
22. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
23.
24. 6: // Generate done signal
25. begin isDone <= 1'b1; i <= i + 1'b1; end
26.
27. 7:
28. begin isDone <= 1'b0; i <= 4'd0; end
29.
30. endcase
代码18.4
根据前面的计算,BA1~BA0再加上 RA12~A0与 CA8~A0以后,一共有24位宽,详细的位分配如表18.4所示:
表18.4 Addr的位分配。
| 位分配 | 地址内容 |
| Addr[23:22] | BANK地址 |
| Addr[21:9] | 行地址 |
| Addr[8:0] | 列地址 |
如代码18.4所示,步骤用来设置IO口为输出。步骤1为rA赋值行地址,步骤3则为rA赋值列地址,并且拉高A10以示自行预充电。步骤6~7用来产生完成信号。
读操作:
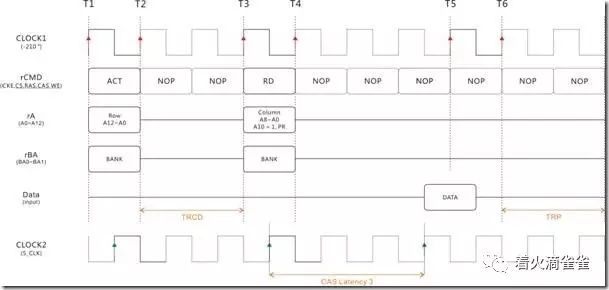
图18.7 读操作的理想时序。
图18.7为读操作的理想时序,大致过程如下:
l T1,发送ACT命令,BANK地址与行地址;
l T1半周期,SDRAM读取;
l T2,满足TRCD;
l T3,发送RD命令,BANK地址与列地址;
l T3半周期,SDRAM读取命令。
l T4,满足 CAS Latency。
l T5,读取数据。
l T6,满足TRP。
读操作与写操作的过程大同小异,除了WR命令变成RD命令以外,A10为1同样表示自行预充电,余下就是满足CAS Latency。好奇的同学一定会觉得疑惑,为何CL 为3呢?其实没什么,只是直感上觉得3这个数字比较顺眼一点。注意CL的计算方式是读取RD命令以后开始计算。
Verilog可以这样描述,结果如代码18.5所示:
1. case( i )
2.
3. 0:
4. begin isOut <= 1'b0; D1 <= 16'd0; i <= i + 1'b1; end
5.
6. 1: // Send Active command with Bank and Row address
7. begin rCMD <= _ACT; rBA <= iAddr[23:22]; rA <= iAddr[21:9]; i <= i + 1'b1; end
8.
9. 2: // wait TRCD 20ns
10. if( C1 == TRCD -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
11. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
12.
13. 3: // Send Read command and column address, pull up A10 to PR.
14. begin rCMD <= _RD; rBA <= iAddr[23:22]; rA <= { 4'b0010, iAddr[8:0]}; i <= i + 1'b1; end
15.
16. 4: // wait CL 3 clock
17. if( C1 == CL -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
18. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
19.
20. 5: // Read Data
21. begin D1 <= S_DQ; i <= i + 1'b1; end
22.
23. 6: // wait TRP 20ns
24. if( C1 == TRP -1 ) begin C1 <= 14'd0; i <= i + 1'b1; end
25. else begin rCMD <= _NOP; C1 <= C1 + 1'b1; end
26.
27. 7: // Generate done signal
28. begin isDone <= 1'b1; i <= i + 1'b1; end
29.
30. 8:
31. begin isDone <= 1'b0; i <= 4'd0; end
32.
33. endcase
代码18.5
代码18.5完全根据图18.7描述,除了步骤7~8用于产生完成信号以外。SDRAM的基本操作大致上就是这样而已,完后我们便可以开始建模了。
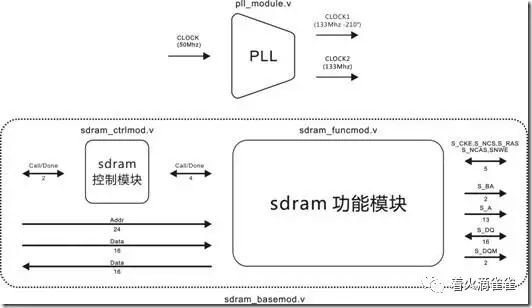
图18.8 SDRAM基础模块的建模图。
图18.8是SDRAM基础模块的建模图,SDRAM基础模块的内容包括SDRAM控制模块,还有SDRAM功能模块。外围的PLL模块应用频率为133Mhz向左位移210°的CLOCK1,还有133Mhz的CLOCK2。CLOCK1用作系统时钟,CLOCK用作SDRAM时钟。如果PLL模块硬要分类的话,它应该属于特殊性质的即时类吧!?
SDRAM控制模块主要负责一些操作的调度,左边2位Call/Done由外部调用,其中 [1]为写操作 [0]为读操作;右边4位Call/Done为调用SDRAM功能模块,其中 [3]为写操作 [2]为读操作 [1]为刷新 [0]为初始化。SDRAM功能模块的右边是驱动SDRAM硬件资源的顶层信号,左边的问答信号被控制模块调用以外,地址信号还有数据信号都直接连接外部。
审核编辑:刘清
-
FPGA
+关注
关注
1633文章
21818浏览量
607205 -
SDRAM
+关注
关注
7文章
434浏览量
55459 -
Verilog
+关注
关注
28文章
1355浏览量
110622 -
锁存器
+关注
关注
8文章
918浏览量
41721 -
时钟源
+关注
关注
0文章
94浏览量
16065
原文标题:Fpga Verilog SDRAM模块① — 单字读写
文章出处:【微信号:zhuyandz,微信公众号:FPGA之家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
关于FPGA读写SDRAM问题?
求助 关于片外SDRAM读写问题
【每周FPGA案例】至简设计系列- SDRAM读写控制器
如何使用Verilog实现基于FPGA的SDRAM控制器?
ref sdr sdram verilog代码
使用Verilog实现基于FPGA的SDRAM控制器
基于FPGA的高速SDRAM控制器的视频应用
FPGA读写SDRAM的实例和SDRAM的相关文章及一些SDRAM控制器设计论文
基于SDRAM控制器软核的Verilog设计







 工商网监
工商网监
评论