 基于事件的视觉惯性速度计
基于事件的视觉惯性速度计
0. 笔者个人体会
事件相机因为比较贵,研究相对小众,但是在一些领域还是有非常好的效果。事件相机估计的是像素强度变化(事件)流,可以达到微秒级的时间分辨率,并且没有运动模糊。基于事件的速度计主要难点是利用事件生成模型中编码的光度和几何约束,实时解决跟踪和建图子问题。
今天笔者将为大家分享港科大沈劭劼团队的最新工作,能够以较低的延迟恢复度量尺度下的瞬时线速度。
1. 效果展示
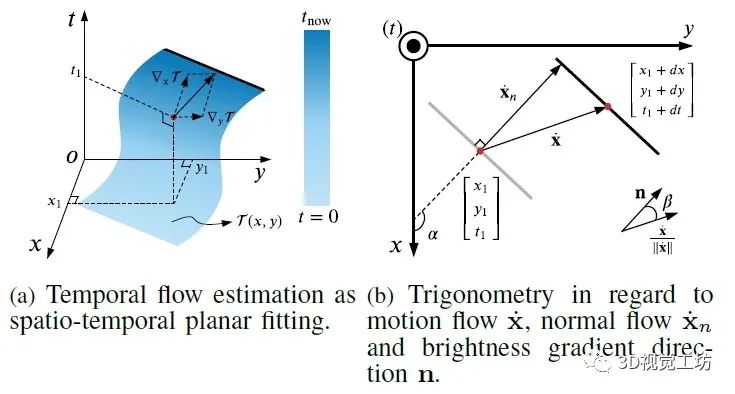
这个速度计框架以事件数据和IMU测量作为输入。图中所示分别为:(a) 无人机在狭窄走廊中进行攻击行为。(b) 基于事件的流估计。(c) 相应的深度估计。(d) 归一化瞬时线速度估计结果。这里也推荐工坊推出的新课程《彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析》。
2. 具体原理是什么?
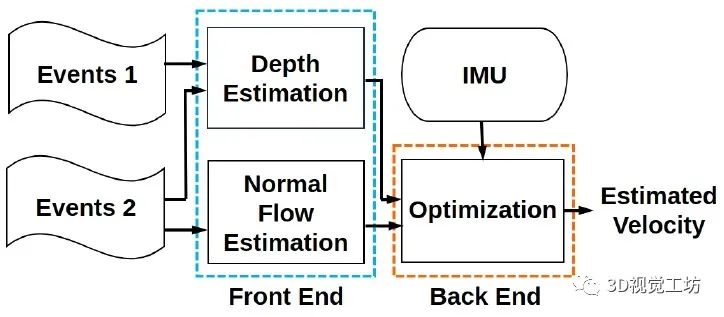
注意这项工作不包括建图,只有速度计系统,使用事件和IMU估计线速度。作者认为可以不用估计事件相机的位置,恢复瞬时线速度更符合事件相机的差分工作原理。因此基于事件的速度计采用连续时间公式,增量地融合来自事件相机和惯性测量单元的异构测量。
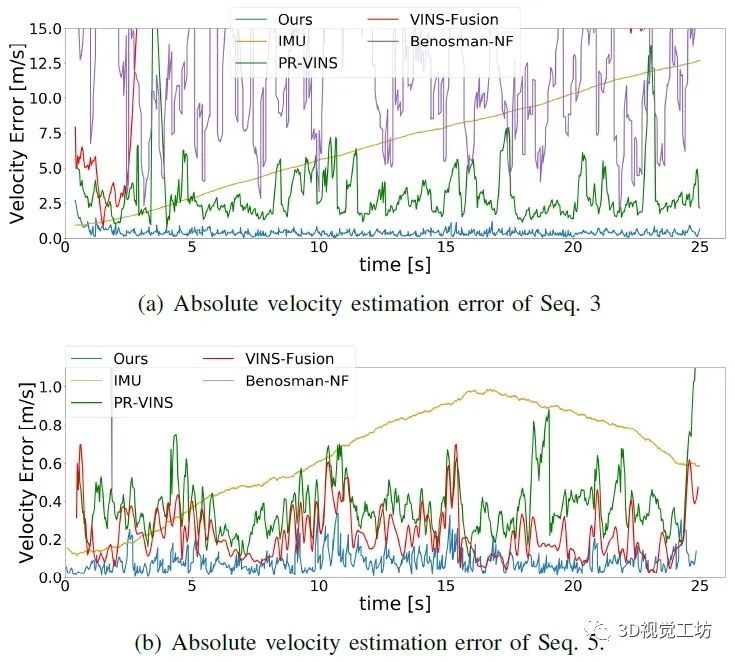
3. 和其他SOTA方法对比如何?
实验设备是13700K CPU,实验结果证明这个方法能够以较低的延迟恢复度量尺度下的瞬时线速度。
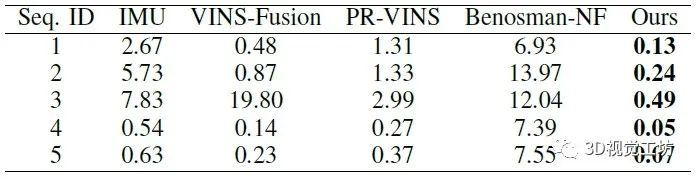
每个序列上的AVE对比结果。
作者:Xiuyuan Lu, Yi Zhou, Shaojie Shen
审核编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
cpu
+关注
关注
68文章
10936浏览量
213689 -
无人机
+关注
关注
230文章
10572浏览量
183326 -
IMU
+关注
关注
6文章
326浏览量
46042
原文标题:港科大沈劭劼团队最新 | 基于事件的视觉惯性速度计
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于加速度计的无陀螺惯性导航系统的研究
基于加速度计的无陀螺惯性导航系统的研究汽车状态的实时准确测量是汽车智能辅助驾驶系统研究的关键问题。本文针对智能辅助驾驶车辆研究的需求,建立了一套无陀螺仪式惯性导航系统。该系统没有采用传统的陀螺仪测量
发表于 12-02 12:40
2227-050加速度计模块
`2227型模块结合了专门设计的高温,开放式印刷电路板(PCB)提供惯性应用和SDI的1527型战术级惯性所需的高稳定性导航MEMS加速度计。 2227是一种低质量,低功耗的模块,在电气和机械方面
发表于 05-28 14:56
1527J-010加速度计
`1527型是一款小型,轻巧的集成MEMS加速度计,用于用于要求高重复性,低重复性的战术级惯性应用噪声,以及在-55至+ 125°C的环境中的长期稳定性。 1527型加速度计是由美国SDI完全
发表于 05-28 15:04
介绍加速度计和陀螺仪的数学模型和基本算法
本帖翻译自IMU(加速度计和陀螺仪设备)在嵌入式应用中使用的指南。这篇文章主要介绍加速度计和陀螺仪的数学模型和基本算法,以及如何融合这两者,侧重算法、思想的讨论介绍本指南旨在向兴趣者介绍惯性MEMS(微机电系统)传感器,特别是加
发表于 08-09 06:46
微加速度计的相关资料分享
在20世纪40年代初,由德国人研制了世界上第一只摆式陀螺加速度计。此后的半个多世纪以来,由于航天、航空和航海领域对惯性测量元件的需求,各种新型加速度计应运而生,性能和精度也有了很大的完善和提高
发表于 11-29 07:41
基于微加速度计的低功耗无线惯性鼠标的设计Design of
提出了一种基于微加速度计的无线惯性鼠标的设计方案。该方案以微加速度计ADXL213 作为信号检测元件,并采用低功耗处理器MSP430F135 和RF 芯片nRF401 进行信号处理与无线传输。
发表于 06-09 10:25
•49次下载
一种提取捷联式惯性测量系统中加速度计动态误差的方法
本文提出了一种利用方向余弦矩阵提取捷联式惯性测量系统中加速度计动态误差的方法。关键词:方向余弦矩阵;动态误差;加速度计Abstract: A method, which, by using Direction Cosine M
发表于 08-06 11:09
•18次下载
全加速度计惯性测量的优化设计及仿真分析
基于炮弹的几何结构及运动特点,设计了一种十二加速度计组合的无陀螺惯性测量方案用于测量弹体运动时的角速度和线加速度. 计算机仿真分析显示这种测量方案直接解算的是
发表于 10-14 16:05
•10次下载
基于KXR94加速度计的微型惯性测量装置设计
基于KXR94加速度计的微型惯性测量装置设计
微型惯性测量装置MIMU(Micro Inertial Measure-ment Unit)以其尺寸小、成本低等特点不仅在传统应用领域得到应用,而且在商业领域占
发表于 11-17 17:22
•1730次阅读
智腾微电子自主研发SiA200系列MEMS加速度计
SiA200系列是青岛智腾微电子自主研发的MEMS加速度计,SiA200系列是一种的电容体的MEMS加速度计,专为惯性应用设计。
传感器之加速度计在惯性导航中的应用
加速度计在惯性导航中的应用 加速度计是惯导系统中的最重要元件之一,用来测量沿其输入轴作用的常值和低频加速度,当前无论在航天航空,还是在其它技术领域都得到了广泛应用。近年来随着型号及其应
发表于 06-11 17:29
•2305次阅读
MEMS加速度计的概念,MEMS加速度计的原理
MEMS加速度计的概念 加速度计是一种惯性传感器,能够测量物体的加速力。加速力就是当物体在加速过程受到的力,就比如地球引力。 加速力可以是个常量比如mg也可以是变量。由于采用了微机电系统技术,其尺寸
发表于 06-01 11:28
•4584次阅读
mems加速度计的组成和工作原理
微机械加速度计又称mems加速度计,是微机械传感器中最重要的一种,属于惯性感器。智腾微电子生产的SiA200系列Mems加速度计主要用于航空、航海等中高端
发表于 07-31 17:33
•5012次阅读
微加速度计的原理与应用
在20世纪40年代初,由德国人研制了世界上第一只摆式陀螺加速度计。此后的半个多世纪以来,由于航天、航空和航海领域对惯性测量元件的需求,各种新型加速度计应运而生,性能和精度也有了很大的完善和提高
发表于 11-19 14:06
•22次下载

三轴加速度计、陀螺仪和磁力计的应用原理
三轴加速度计是一种惯性传感器,能够测量物体的比力,即去掉重力后的整体加速度或者单位质量上作用的非引力。当加速度计保持静止时,加速度计能够感知





 工商网监
工商网监
评论